1. ubuntu安装对应版本ros
ubuntu20.04可参考:
2. 安装python3-roslib
sudo apt-get install python3-roslib
3.在conda环境中安装rospy
pip install rospkg
pip install catkin-tools
4.验证安装
安装完成后,可以通过运行Python并尝试导入rospy来验证安装是否成功:
python -c "import rospy"
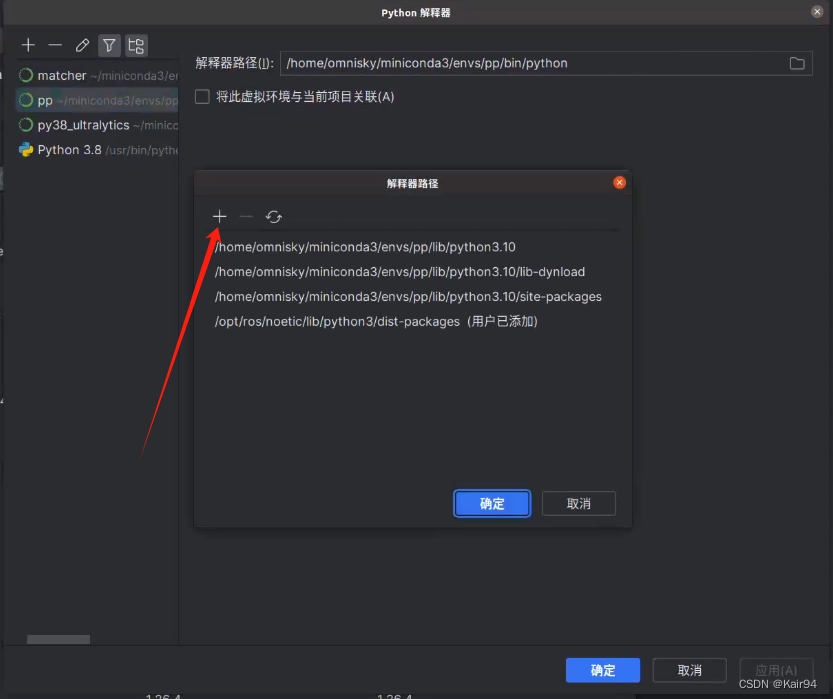
5.在解释器中添加rospy的路径
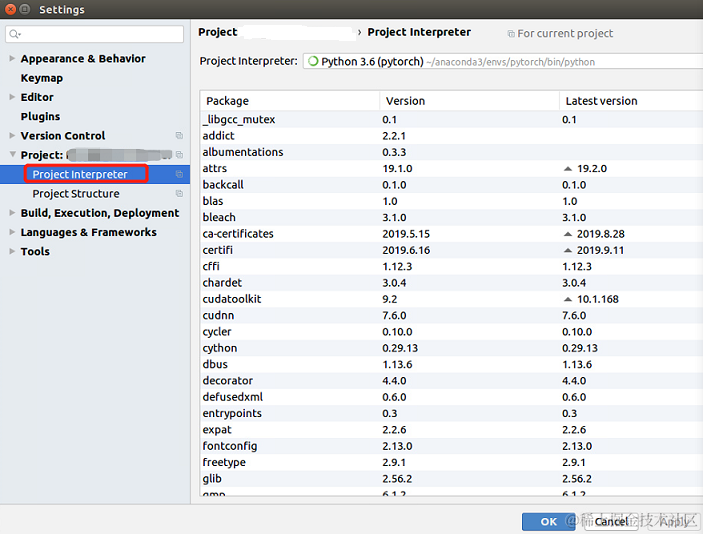
- 文件->设置
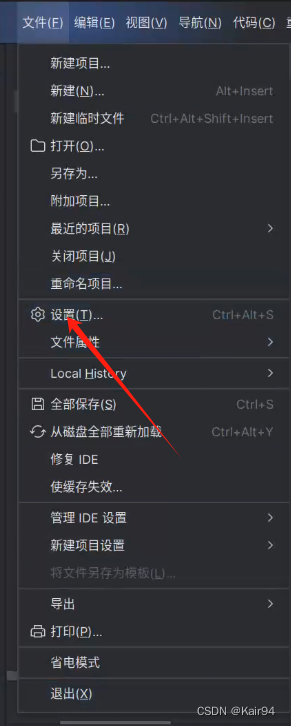
- 项目的Python解释器
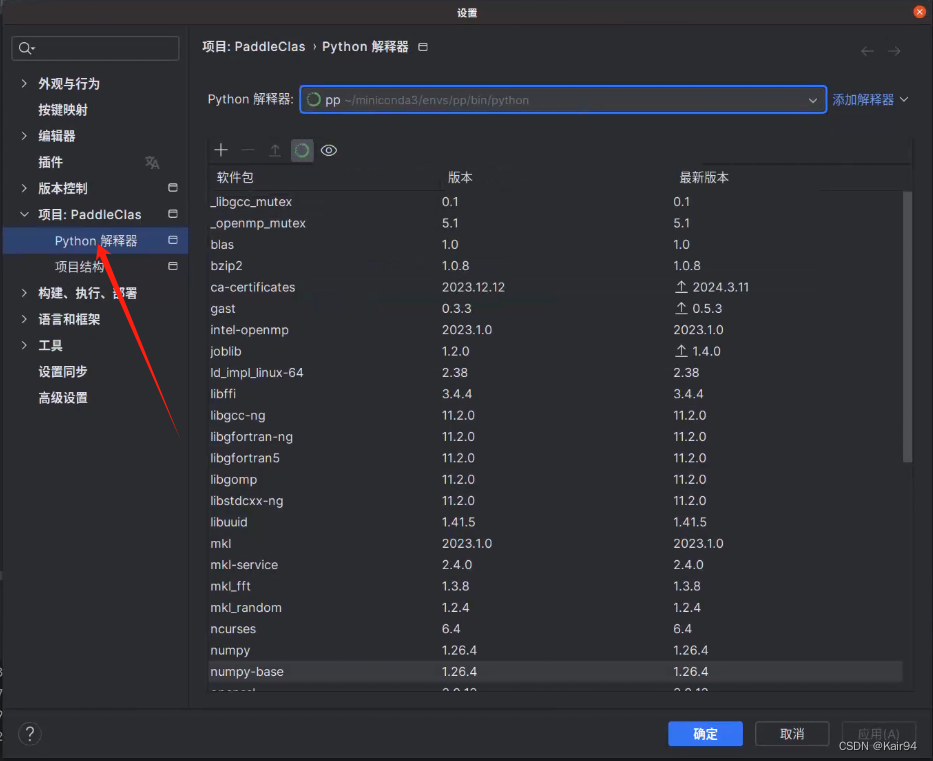
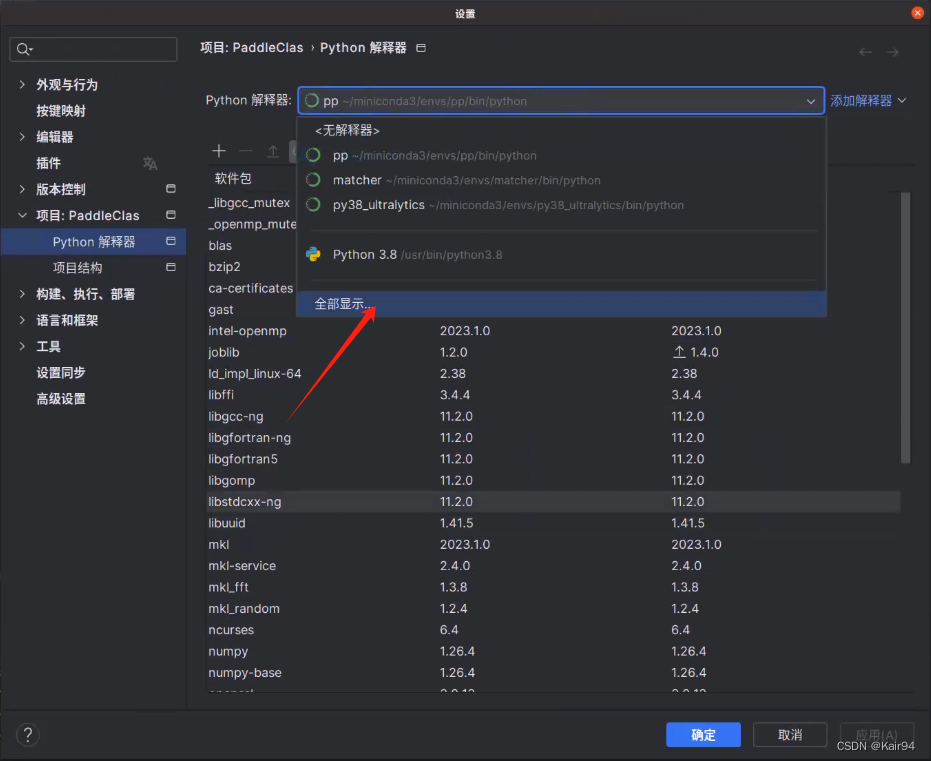
- 对应虚拟环境的解释器路径
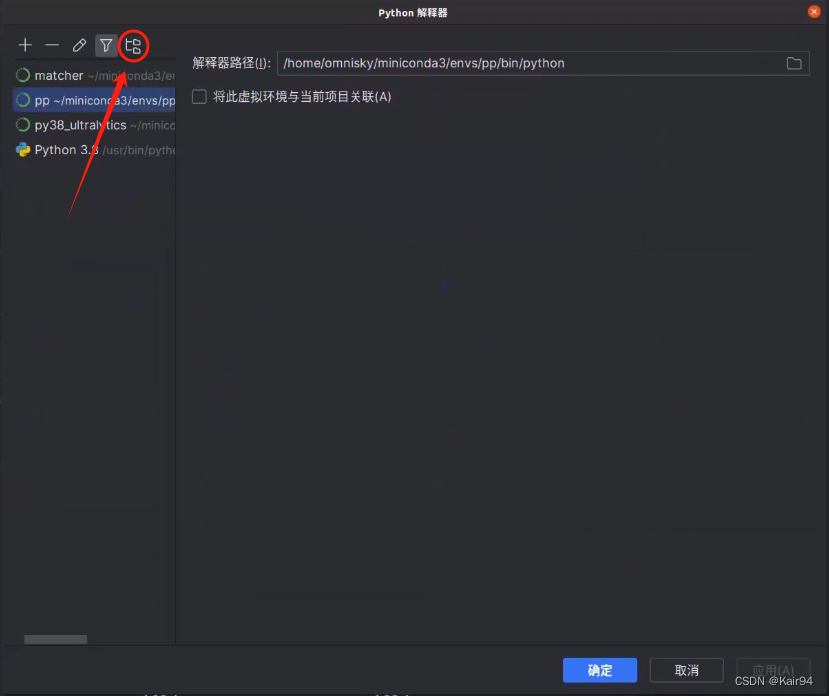
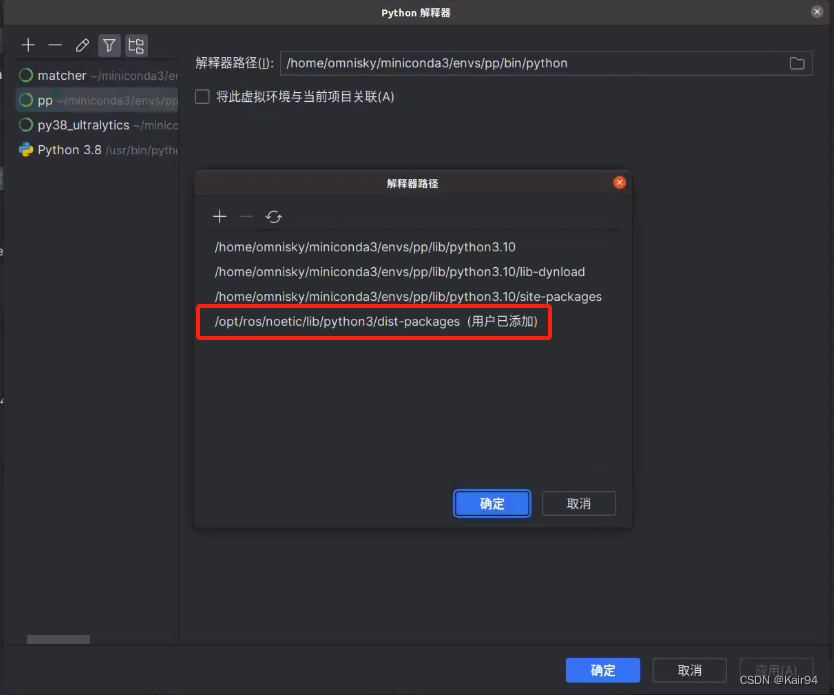
- 添加解释器路径
一般为ROS安装目录下的dist-packages文件夹(/opt/ros/noetic/lib/python3/dist-packages)