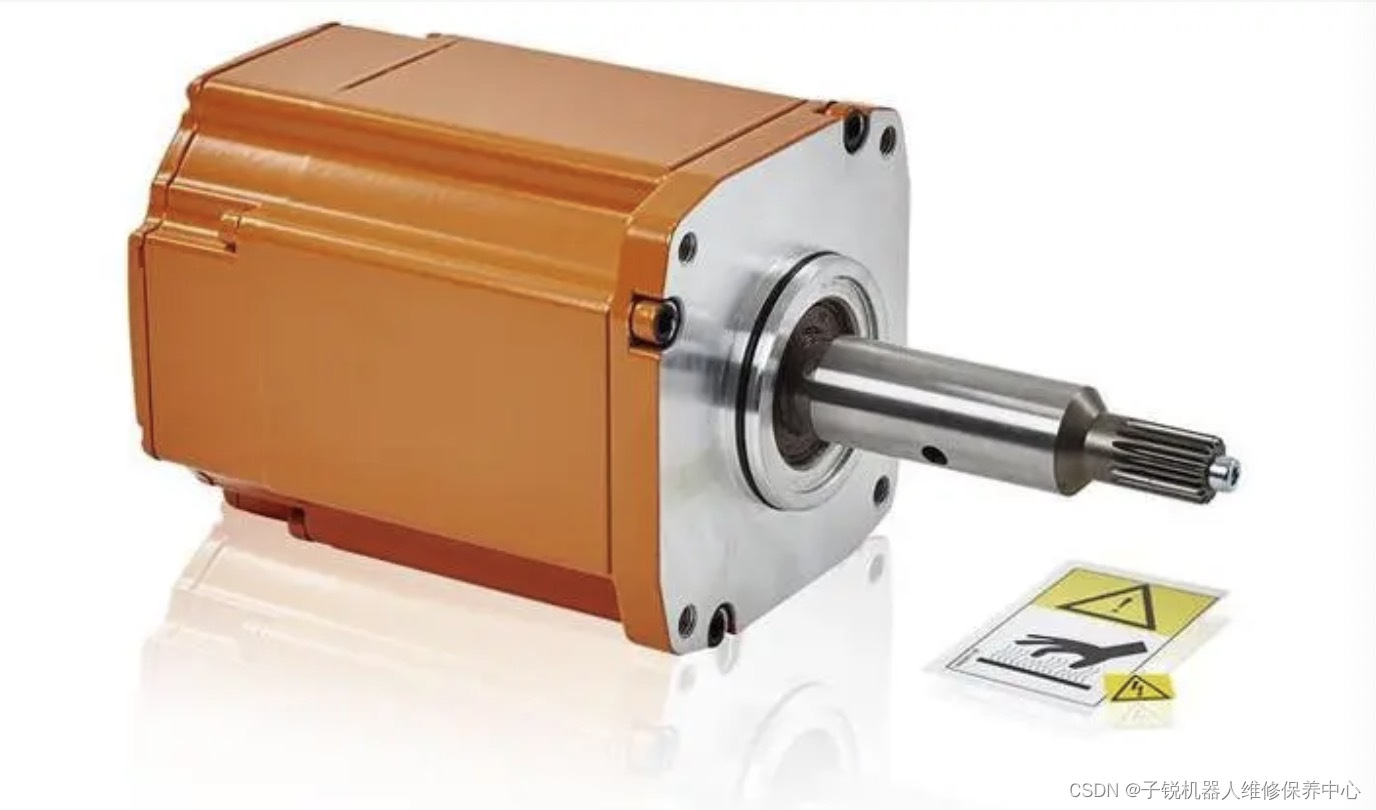
在当今的自动化工业领域,川崎工业机器人以其卓越的性能和可靠的工作效率赢得了广泛的赞誉。作为机器人的核心组成部分,伺服电机的作用至关重要。然而,就像所有机械设备一样,也可能会遭遇电机磨损或故障,需要适时的川崎机器人维修与Kasawaki机械手保养。
伺服电机是精密的设备,负责将电信号转换为机械运动。它们通常用于精确控制速度、位置和加速度。在川崎工业机器人中,这些电机承担着重要的角色,如操作臂的运动控制等。
常见川崎工业机械手伺服马达故障及诊断
1. 电机不运转:首先检查电源连接是否正常,然后检查控制器有无输出信号。此外,还可能是编码器或电路问题。
2. 温度过高:持续作业导致过热可能是散热系统不足或润滑油缺失。定期清洁风扇和散热器是必要的预防措施。
3. 震动或噪音过大:这可能是轴承损坏或机械部件松动所致。应立即关闭设备进行检查。
4. 精度下降:检查系统是否存在磨损的机械组件,或者校准是否已失准。
工业机器人伺服电机维修步骤
1. 断电检查:在进行任何Kasawaki机器人维护之前,务必切断电源,以确保安全。
2. 外观检查:检查川崎机械臂伺服电机外壳是否有明显损伤,各连接点是否牢固无松动。
3. 内部清洁:打开电机壳体,清除内部的灰尘和异物,避免造成短路或磨损。
4. 更换易损件:根据使用情况,更换轴承、弹簧等易损品,保证运动部件的顺畅。
5. 电气检测:利用专业工具测量电机线圈的电阻值和绝缘性,确保电路完好无损。
6. 软件调试:对机械手伺服驱动器进行重新设定和调试,以优化其性能。
子锐机器人常见川崎机器人维修型号包括:
川崎机械手电源50632-0023维修
Kasawaki机械臂50607-0132驱动单元维修
Kasawaki工业机器人50999-2924R03安全板维修
川崎机器人示教器50817-0096L05维修
川崎机械手臂外部轴放大器50607-0128维修
Kasawaki工业机械手主机电源50630-0033维修
川崎机械臂主板50999-0137维修
Kasawaki川崎机器人故障维修
2024-05-14 14:28:17 32 阅读