1.将urdf生成slx文件
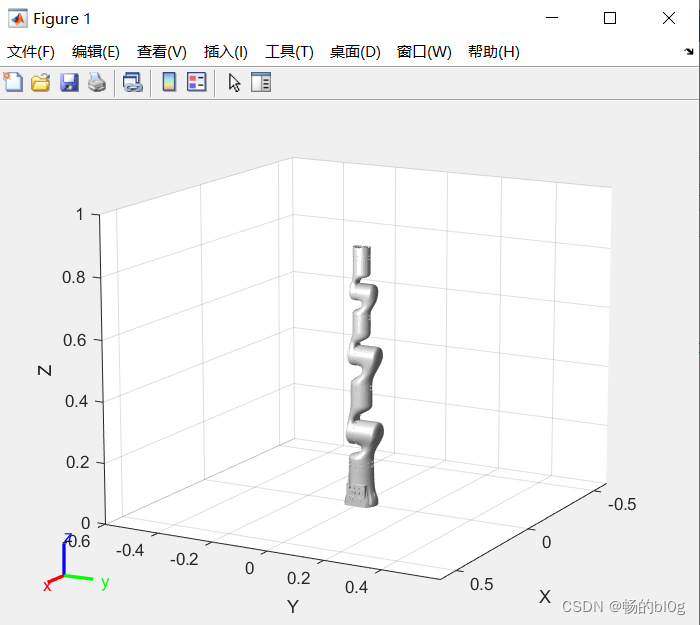
smimport('rm_65_flange.urdf');%生成Simscape物理模型

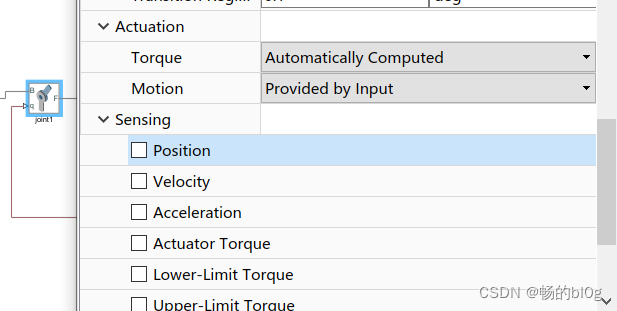
2.更换joint部分(对应与几个输入几个输出)(依次更换)
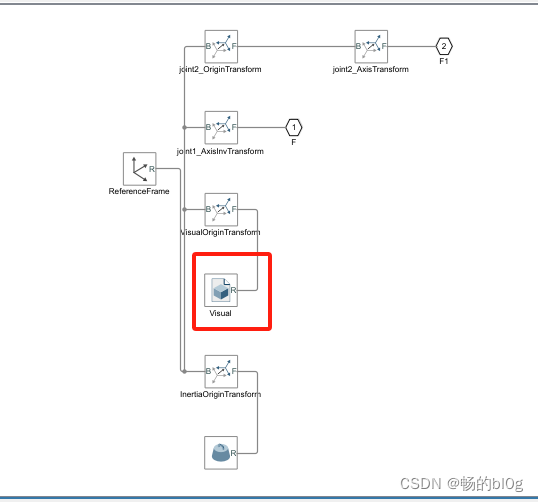
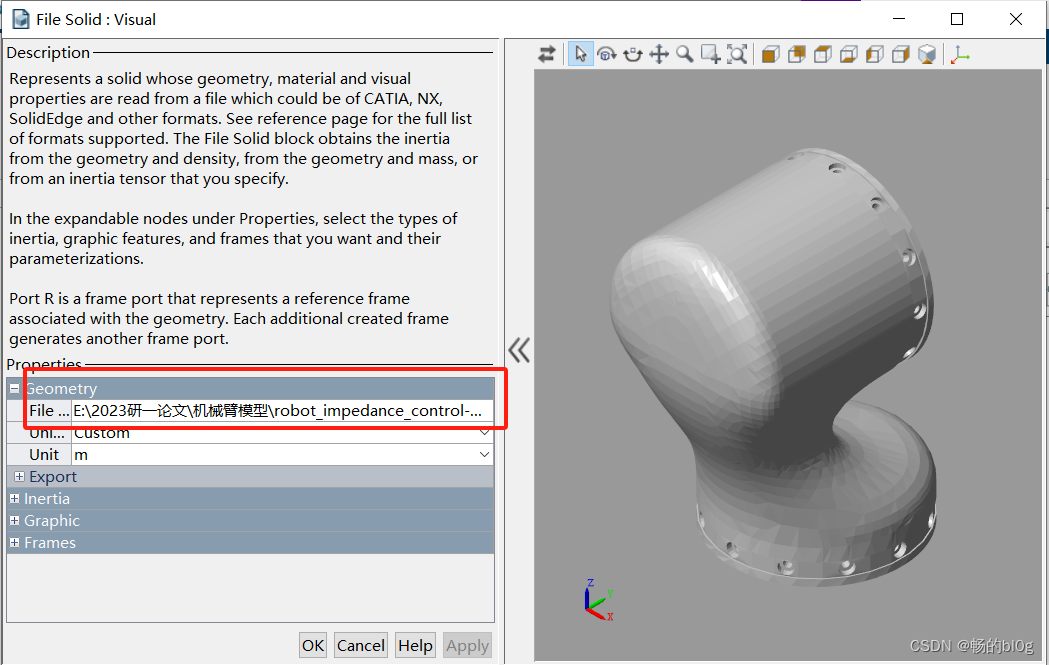
3.更改关节部分(依次更换)

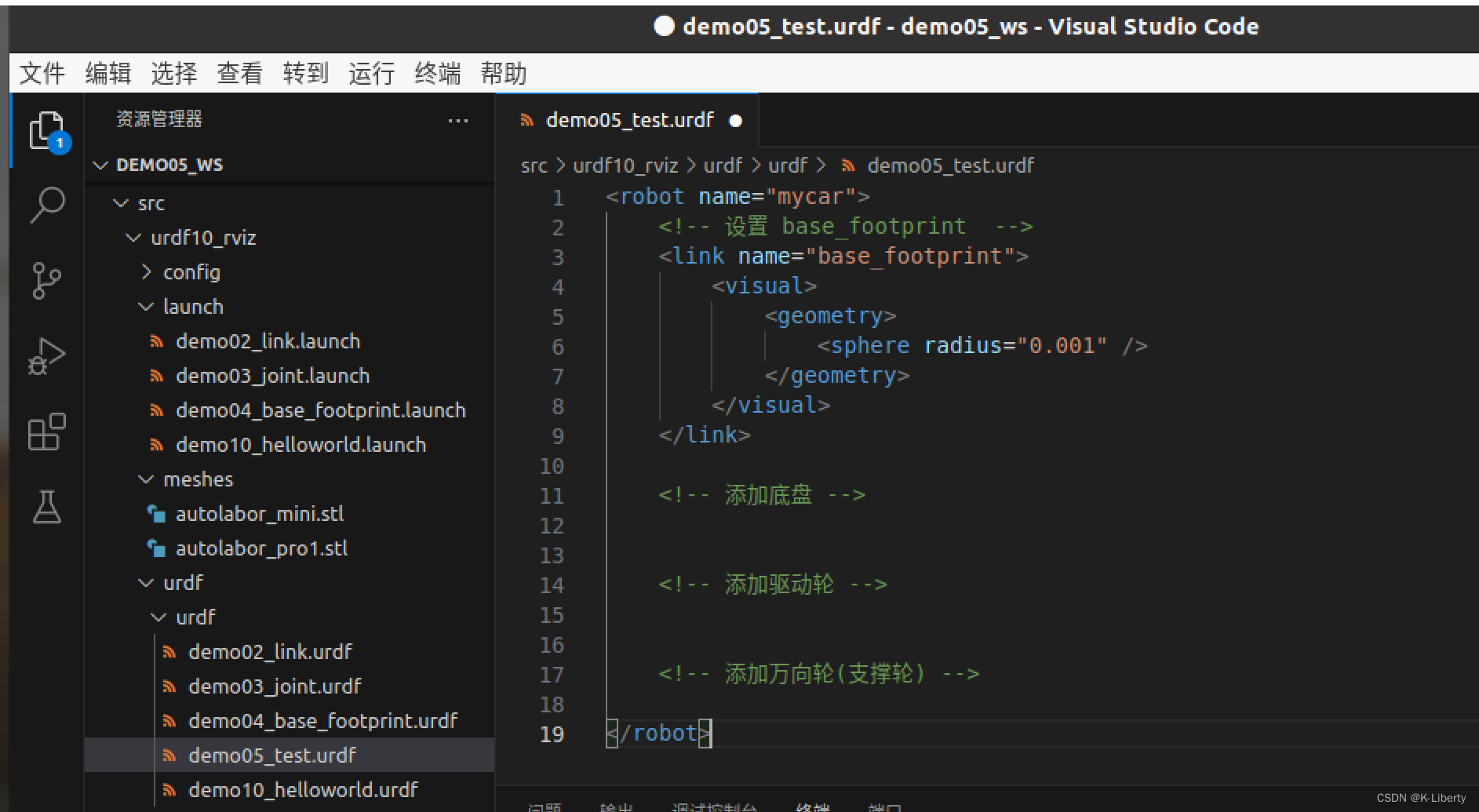
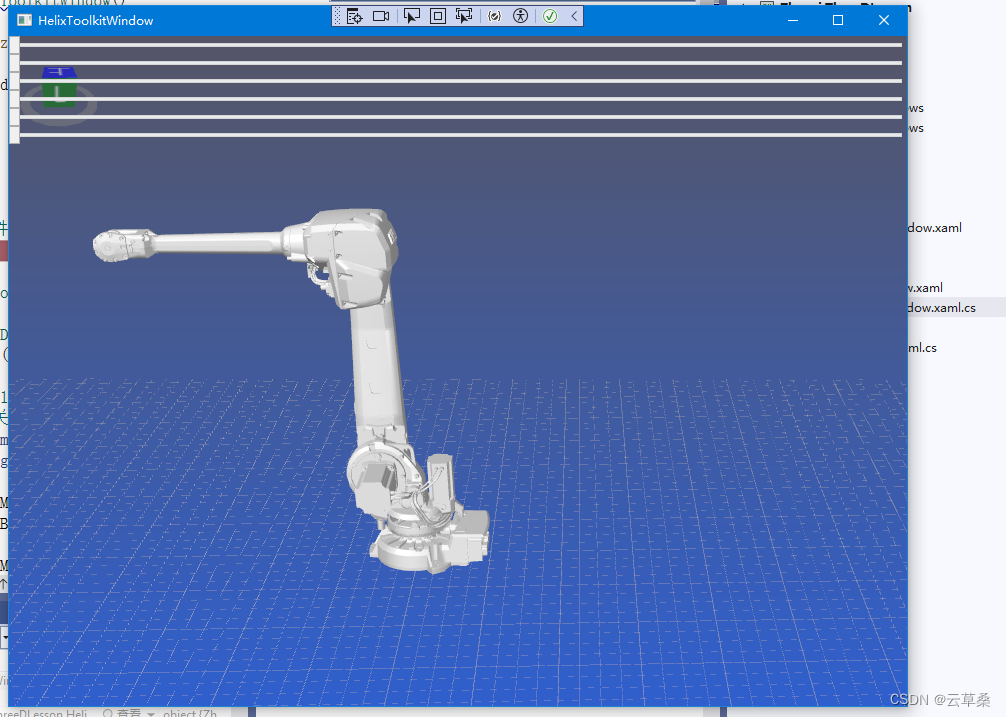
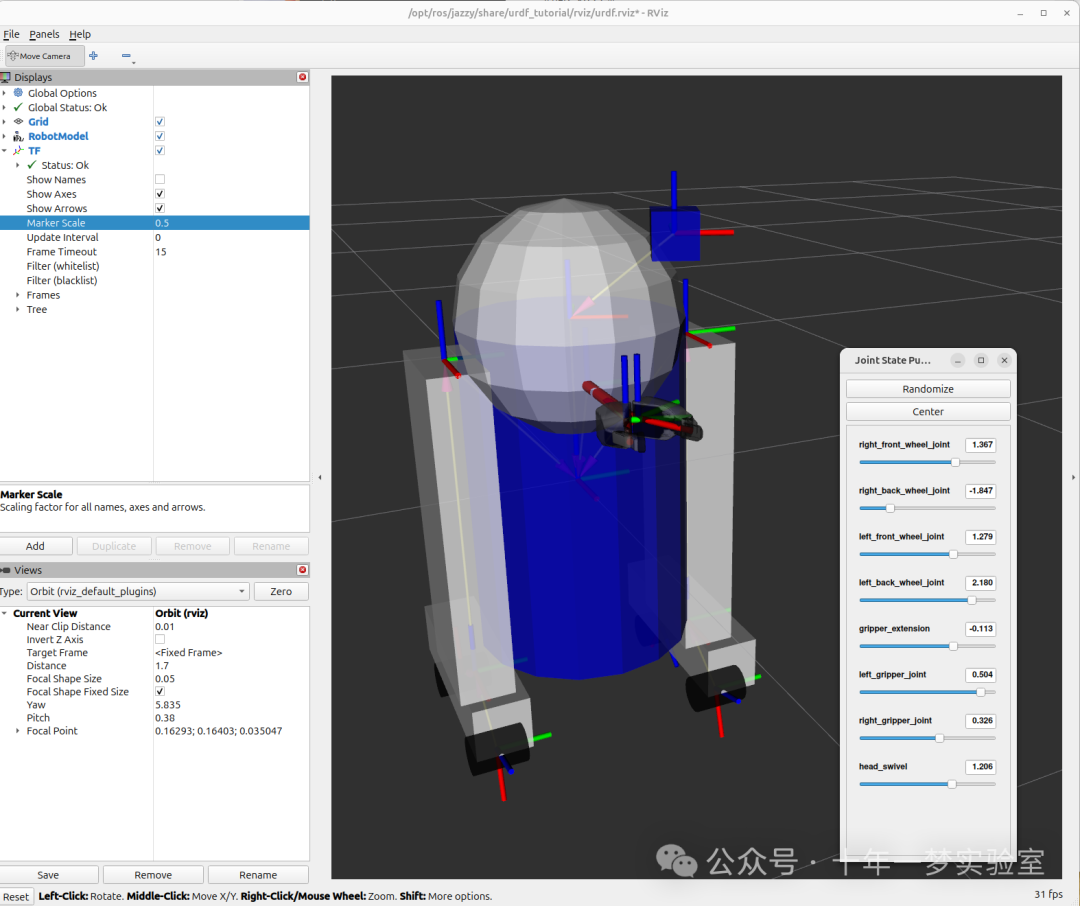
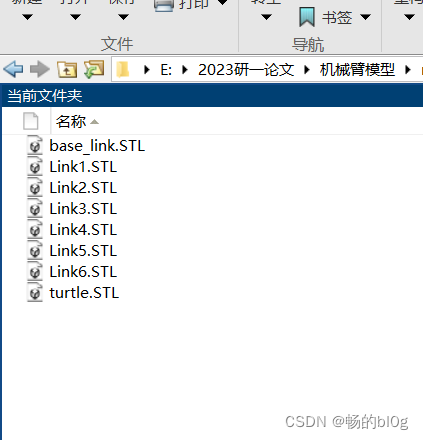
找到urdf文件夹下的meshes文件夹,看到里面的STL文件
1.将urdf生成slx文件
smimport('rm_65_flange.urdf');%生成Simscape物理模型
2.更换joint部分(对应与几个输入几个输出)(依次更换)
3.更改关节部分(依次更换)
找到urdf文件夹下的meshes文件夹,看到里面的STL文件