URDF建模

URDF
URDF,全称为 Unified Robot Description Format(统一机器人描述格式),是一种用于描述机器人几何结构和运动学属性的标准文件格式。URDF 文件通常用于机器人模拟、路径规划、控制算法开发和可视化等领域,特别是在 ROS(Robot Operating System)环境中非常常见。
URDF 建模主要关注以下方面:
Link(链接):表示机器人中的刚体部分,如机器人的手臂、腿或任何静态部件。每个链接都有自己的惯性属性,如质量和转动惯量,以及几何形状,如碰撞体(colliders)和视觉表示(visuals)。
Joint(关节):描述链接之间的连接方式,包括关节类型(如revolute旋转关节、prismatic直线关节等)、关节轴线、限制条件(如关节限位)和动力学属性(如摩擦力)。
Inertial(惯性):描述链接的质量和转动惯量等物理属性。
Collision(碰撞):用于物理模拟和碰撞检测的几何形状,通常较为简单。
Visual(视觉):用于渲染和可视化的几何形状,可能比碰撞形状更复杂,以提供更真实的外观。
Material(材质):定义颜色和纹理,用于视觉表示。
Actuator(执行器):描述驱动关节的设备,如电机或液压缸的属性。
Transmissions(传动装置):定义执行器如何影响关节的运动。
Gazebo Plugins(Gazebo 插件):用于在 Gazebo 模拟器中扩展机器人的行为,如传感器模型。
URDF 建模过程涉及创建和配置上述组件,以准确地反映机器人的结构和动力学。URDF 文件通常是 XML 格式的,可以通过文本编辑器手动编写,也可以使用工具辅助生成。
URDF 与 DH 参数(Denavit-Hartenberg 参数)有联系,DH 参数用于描述关节间的相对位置和方向,而 URDF 可以基于这些参数来构建机器人的结构模型。然而,URDF 提供了更为丰富和详细的描述,包括几何形状、物理属性和传感器信息等。
机器人组成

内部关系

Links 与 Joints

Links

Joint

UDRF建模弊端

xacro模型文件

常量定义与使用

数学计算

宏定义、宏调用

文件包含

定义排版

launch文件

#三维模型导出URDF
网上找到UR3机械臂的资源,把 “.step” 后缀结尾的文件,在solidwork中打开如图

link和joint的配置

生成模型功能包

测试修改bug

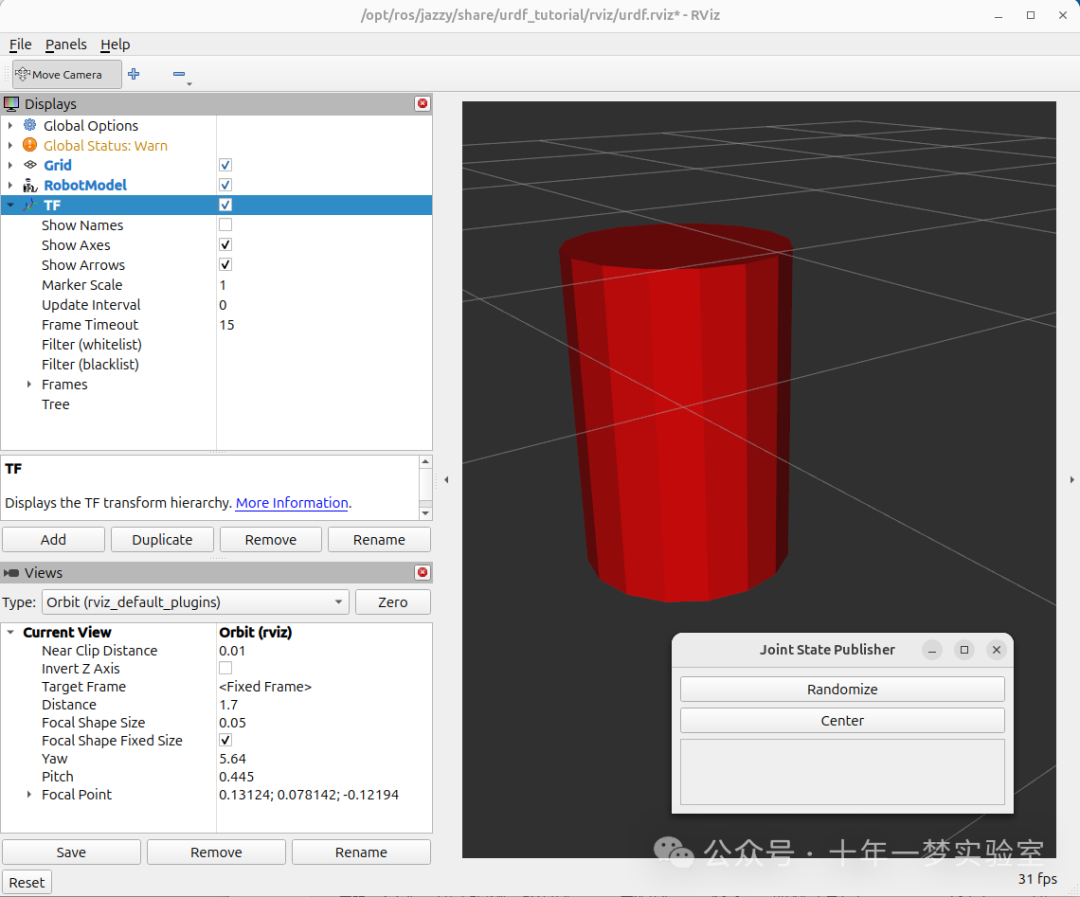
结果展示

solid works
SolidWorks 是一款广泛使用的三维 CAD 软件,主要用于机械设计。要将 SolidWorks 的模型转换为 URDF(Unified Robot Description Format)格式,用于机器人仿真和控制,你需要一个插件或者工具来辅助这个过程。虽然 SolidWorks 本身并不直接支持 URDF 格式,但有一些第三方插件可以实现这一功能,比如 sw2urdf。
选择哪一款 SolidWorks 版本对于 URDF 转换而言,主要取决于以下几点:
插件兼容性:确保你所选择的 SolidWorks 版本与你打算使用的 URDF 插件兼容。不同的插件可能支持不同版本的 SolidWorks。
功能需求:如果你的模型非常复杂,可能需要使用更高版本的 SolidWorks,因为较新版本往往包含更多功能和改进的性能,这可以帮助你更高效地创建和管理复杂的装配体。
硬件要求:SolidWorks 的高版本通常需要更强的硬件配置。如果您的计算机硬件不够强大,可能会影响软件运行的流畅性和稳定性。
许可成本:SolidWorks 不同版本的价格不同,且功能也有差异。你需要评估成本效益,选择最适合你预算和需求的版本。
技术支持:较新的 SolidWorks 版本通常会获得更好的技术支持和更新。
用户熟悉度:如果你已经熟悉某个版本的 SolidWorks,除非有特别的功能需求,否则继续使用熟悉的版本可能会更加高效。
对于 URDF 导出而言,关键在于找到一个稳定且功能全面的插件,它能够准确地将你的 SolidWorks 模型转换为 URDF 文件。sw2urdf 插件能够处理 SolidWorks 的零件和装配体,自动识别关节类型、变换和轴,这对于 URDF 建模是非常重要的。
目录架构

相关文件
CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(UR3)
find_package(catkin REQUIRED)
catkin_package()
find_package(roslaunch)
foreach(dir config launch meshes urdf)
install(DIRECTORY ${dir}/
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/${dir})
endforeach(dir)
package.xml
<package format="2">
<name>UR3</name>
<version>1.0.0</version>
<description>
<p>URDF Description package for UR3</p>
<p>This package contains configuration data, 3D models and launch files
for UR3 robot</p>
</description>
<author>TODO</author>
<maintainer email="TODO@email.com" />
<license>BSD</license>
<buildtool_depend>catkin</buildtool_depend>
<depend>roslaunch</depend>
<depend>robot_state_publisher</depend>
<depend>rviz</depend>
<depend>joint_state_publisher_gui</depend>
<depend>gazebo</depend>
<export>
<architecture_independent />
</export>
</package>
display.launch
<launch>
<arg
name="model" />
<param
name="robot_description"
textfile="$(find UR3)/urdf/UR3.urdf" />
<node
name="joint_state_publisher_gui"
pkg="joint_state_publisher_gui"
type="joint_state_publisher_gui" />
<node
name="robot_state_publisher"
pkg="robot_state_publisher"
type="robot_state_publisher" />
<node
name="rviz"
pkg="rviz"
type="rviz"
args="-d $(find UR3)/urdf.rviz" />
</launch>
gazebo.launch
<launch>
<include
file="$(find gazebo_ros)/launch/empty_world.launch" />
<node
name="tf_footprint_base"
pkg="tf"
type="static_transform_publisher"
args="0 0 0 0 0 0 base_link base_footprint 40" />
<node
name="spawn_model"
pkg="gazebo_ros"
type="spawn_model"
args="-file $(find UR3)/urdf/UR3.urdf -urdf -model UR3"
output="screen" />
<node
name="fake_joint_calibration"
pkg="rostopic"
type="rostopic"
args="pub /calibrated std_msgs/Bool true" />
</launch>
ur3.urdf
<?xml version="1.0" encoding="utf-8"?>
<!-- This URDF was automatically created by SolidWorks to URDF Exporter! Originally created by Stephen Brawner (brawner@gmail.com)
Commit Version: 1.6.0-4-g7f85cfe Build Version: 1.6.7995.38578
For more information, please see http://wiki.ros.org/sw_urdf_exporter -->
<robot
name="UR3">
<link
name="base_link">
<inertial>
<origin
xyz="2.105E-05 0.098059 -0.0036545"
rpy="0 0 0" />
<mass
value="1.371" />
<inertia
ixx="0.0018288"
ixy="4.4582E-07"
ixz="-2.0556E-07"
iyy="0.0019082"
iyz="0.00013405"
izz="0.0017646" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/base_link.STL" />
</geometry>
<material
name="">
<color
rgba="0.89804 0.91765 0.92941 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/base_link.STL" />
</geometry>
</collision>
</link>
<link
name="link1">
<inertial>
<origin
xyz="-6.5885E-06 0.055927 0.0072937"
rpy="0 0 0" />
<mass
value="0.75521" />
<inertia
ixx="0.0010675"
ixy="-9.4953E-08"
ixz="1.0255E-07"
iyy="0.00090525"
iyz="-0.00013058"
izz="0.00099003" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link1.STL" />
</geometry>
<material
name="">
<color
rgba="0.79216 0.81961 0.93333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link1.STL" />
</geometry>
</collision>
</link>
<joint
name="joint1"
type="revolute">
<origin
xyz="0 0 0.0844"
rpy="1.5708 0 -3.1416" />
<parent
link="base_link" />
<child
link="link1" />
<axis
xyz="1 0 0" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
<link
name="link2">
<inertial>
<origin
xyz="-2.6778E-06 0.060634 0.09327"
rpy="0 0 0" />
<mass
value="1.6559" />
<inertia
ixx="0.0025822"
ixy="-8.909E-08"
ixz="1.019E-07"
iyy="0.002419"
iyz="-9.301E-05"
izz="0.0016021" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link2.STL" />
</geometry>
<material
name="">
<color
rgba="0.79216 0.81961 0.93333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link2.STL" />
</geometry>
</collision>
</link>
<joint
name="joint2"
type="revolute">
<origin
xyz="0 0.0675 0.05235"
rpy="1.5708 0 -3.1416" />
<parent
link="link1" />
<child
link="link2" />
<axis
xyz="1 0 0" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
<link
name="link3">
<inertial>
<origin
xyz="-0.0050453 -0.11121 3.4154E-06"
rpy="0 0 0" />
<mass
value="0.96204" />
<inertia
ixx="0.0010146"
ixy="4.5981E-05"
ixz="6.2628E-08"
iyy="0.00054242"
iyz="-4.3697E-08"
izz="0.0010724" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link3.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link3.STL" />
</geometry>
</collision>
</link>
<joint
name="joint3"
type="revolute">
<origin
xyz="0 -0.02535 0.24365"
rpy="-1.5708 0 -1.5708" />
<parent
link="link2" />
<child
link="link3" />
<axis
xyz="1 0 0" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
<link
name="link4">
<inertial>
<origin
xyz="0.0059208 -0.0007977 2.6694E-07"
rpy="0 0 0" />
<mass
value="0.32519" />
<inertia
ixx="0.00019459"
ixy="1.8337E-05"
ixz="1.3898E-10"
iyy="0.00019909"
iyz="1.2329E-09"
izz="0.00022621" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link4.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link4.STL" />
</geometry>
</collision>
</link>
<joint
name="joint4"
type="revolute">
<origin
xyz="-0.0834 -0.213 0"
rpy="-3.1416 0 0" />
<parent
link="link3" />
<child
link="link4" />
<axis
xyz="1 0 0" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
<link
name="link5">
<inertial>
<origin
xyz="0.0059208 0.00079771 -2.3761E-07"
rpy="0 0 0" />
<mass
value="0.32519" />
<inertia
ixx="0.00019459"
ixy="-1.8338E-05"
ixz="-2.0382E-10"
iyy="0.00019909"
iyz="1.211E-09"
izz="0.00022621" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link5.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link5.STL" />
</geometry>
</collision>
</link>
<joint
name="joint5"
type="revolute">
<origin
xyz="0 0.0834 0"
rpy="0 0 -1.5708" />
<parent
link="link4" />
<child
link="link5" />
<axis
xyz="1 0 0" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
<link
name="link6">
<inertial>
<origin
xyz="4.7334E-10 0.00010334 -0.021073"
rpy="0 0 0" />
<mass
value="0.11536" />
<inertia
ixx="4.2469E-05"
ixy="1.5688E-12"
ixz="1.7329E-12"
iyy="4.2681E-05"
iyz="1.0324E-07"
izz="5.9067E-05" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link6.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://UR3/meshes/link6.STL" />
</geometry>
</collision>
</link>
<joint
name="joint6"
type="revolute">
<origin
xyz="0 -0.0409 0"
rpy="1.5708 0.2207 3.1416" />
<parent
link="link5" />
<child
link="link6" />
<axis
xyz="1 0 0" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
</robot>





















![[iOS]static、extern、const关键字比较](https://i-blog.csdnimg.cn/direct/8d48630f91904d238c7b0b74cad4962e.png)

![[iOS]内存分区](https://i-blog.csdnimg.cn/direct/b4187d2d81c14350b440a29d00be0290.png)




![AI安全系列——[第五空间 2022]AI(持续更新)](https://img-blog.csdnimg.cn/direct/db5bc677dd764f94a839e19ab651a32c.png)