实例演示:
创建一个四轮圆柱状机器人模型,机器人参数如下:
1、底盘为圆柱状,半径 10cm,高 8cm,
四轮由两个驱动轮和两个万向支撑轮组成,
2、两个驱动轮半径为 3.25cm,轮胎宽度1.5cm,
3、两个万向轮为球状,半径 0.75cm,
底盘离地间距为 1.5cm (与万向轮直径一致)。
创建机器人模型步骤如下:
1、新建 urdf 文件,并与 launch 文件集成
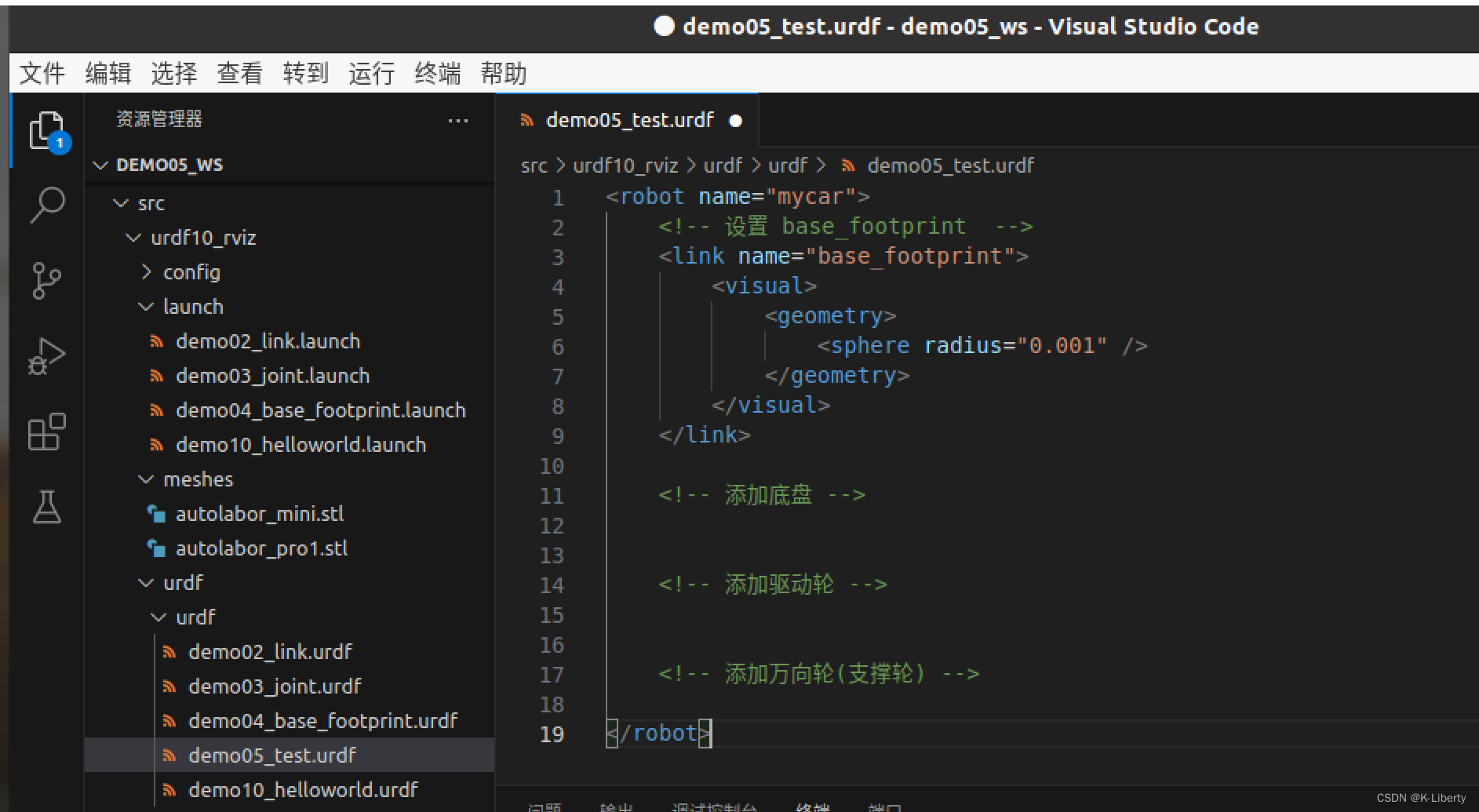




2、搭建底盘

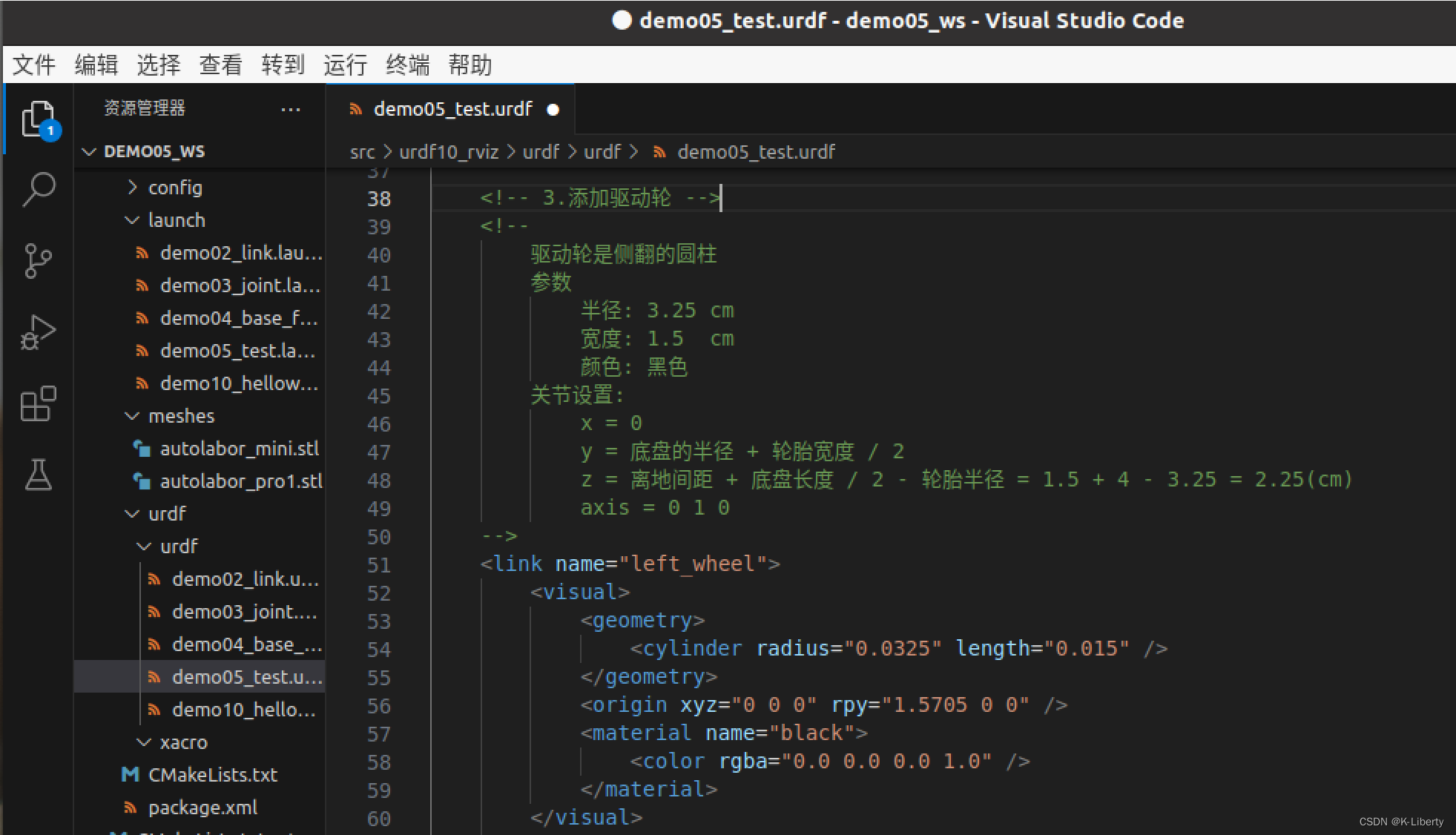
3、在底盘上添加两个驱动轮

4、在底盘上添加两个万向轮



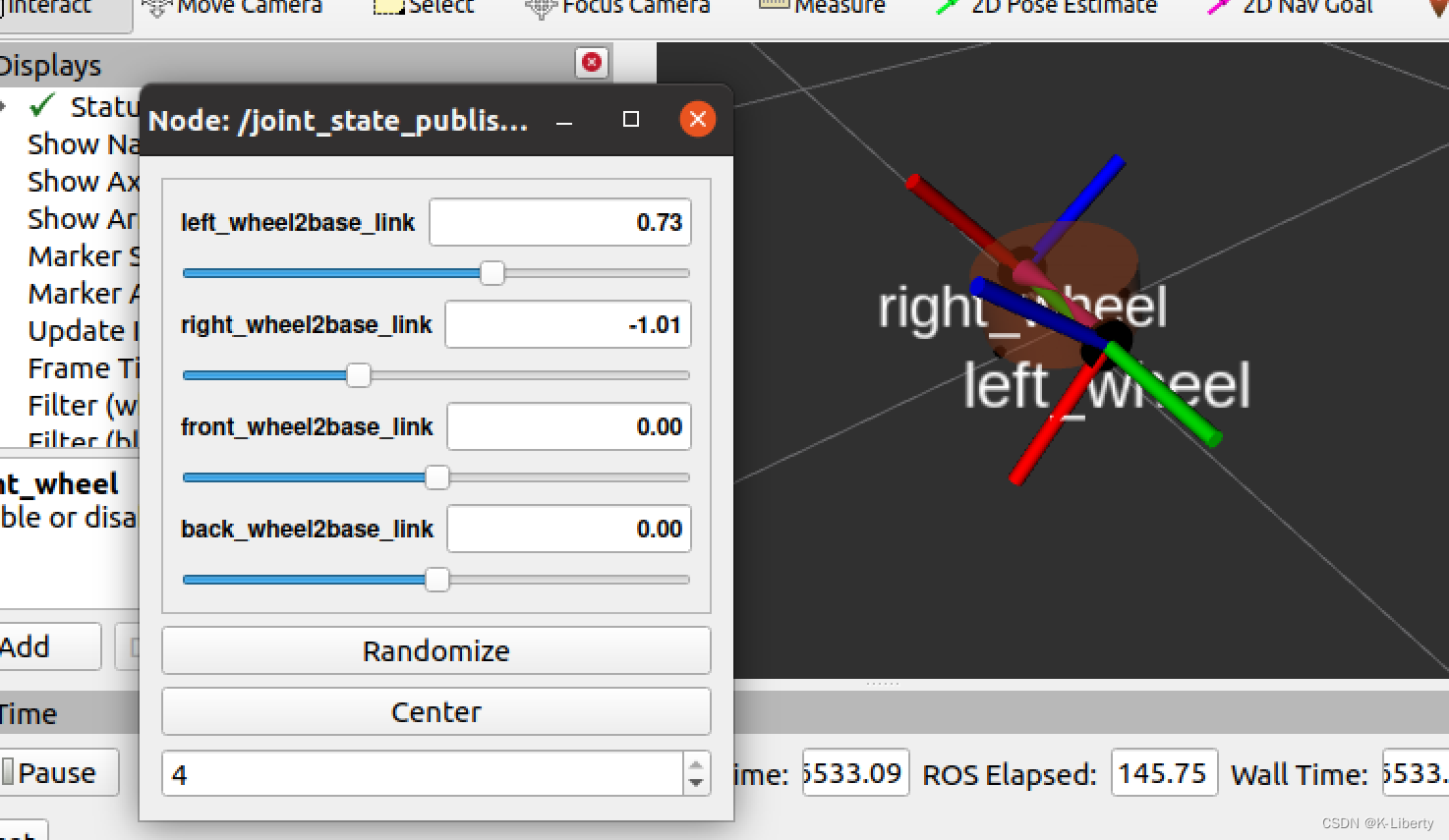
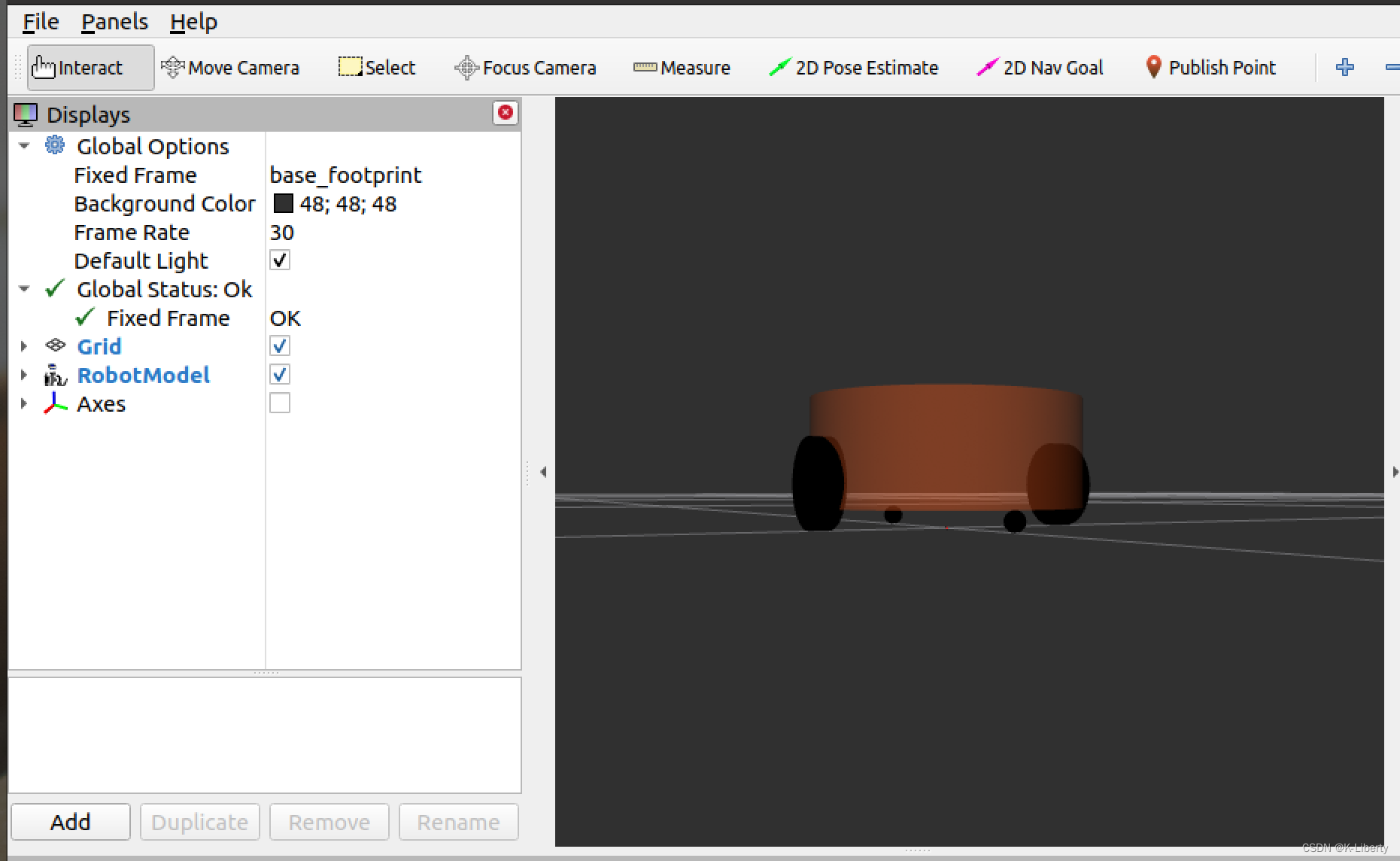
5、结果演示


实例演示:
创建一个四轮圆柱状机器人模型,机器人参数如下:
1、底盘为圆柱状,半径 10cm,高 8cm,
四轮由两个驱动轮和两个万向支撑轮组成,
2、两个驱动轮半径为 3.25cm,轮胎宽度1.5cm,
3、两个万向轮为球状,半径 0.75cm,
底盘离地间距为 1.5cm (与万向轮直径一致)。
创建机器人模型步骤如下:
1、新建 urdf 文件,并与 launch 文件集成
2、搭建底盘
3、在底盘上添加两个驱动轮
4、在底盘上添加两个万向轮
5、结果演示