😏★,°:.☆( ̄▽ ̄)/$:.°★ 😏
这篇文章主要介绍VINO-Mono安装部署与运行。
学其所用,用其所学。——梁启超
欢迎来到我的博客,一起学习,共同进步。
喜欢的朋友可以关注一下,下次更新不迷路🥞
😏1. VINO-Mono介绍
Github地址:https://github.com/HKUST-Aerial-Robotics/VINS-Mono
VINS-Mono是香港科技大学开源的一个VIO算法。
VINS-Mono是由一个单目相机和一个低成本IMU组成的鲁棒通用的单目视觉惯性系统。通过融合预积分的IMU测量值和特征观测值来获得高精度的视觉惯性里程计,在结合闭环检测和图优化,构成了一个完整的单目VIO-SLAM系统。
😊2. 环境安装与配置
# 安装ceres
# ceres-1.14
wget ceres-solver.org/ceres-solver-1.14.0.tar.gz
tar -zxvf ceres-solver-1.14.0.tar.gz
cd ceres-solver-1.14.0
mkdir build && cd build
cmake .. && make
sudo make install
# 安装依赖并编译
sudo apt-get install ros-YOUR_DISTRO-cv-bridge ros-YOUR_DISTRO-tf ros-YOUR_DISTRO-message-filters ros-YOUR_DISTRO-image-transport
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git
cd ../
catkin_make
😆3. 数据集运行
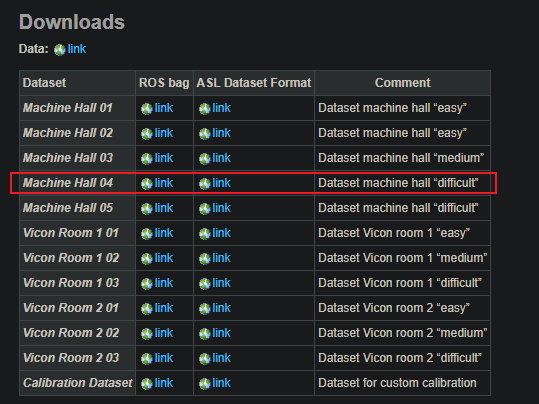
数据集下载:https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
建议下载这个,比较小,1.3GB左右。
打开三个终端,依次运行:
roslaunch vins_estimator euroc.launch
roslaunch vins_estimator vins_rviz.launch
rosbag play YOUR_PATH_TO_DATASET/MH_01_easy.bag
效果如下:
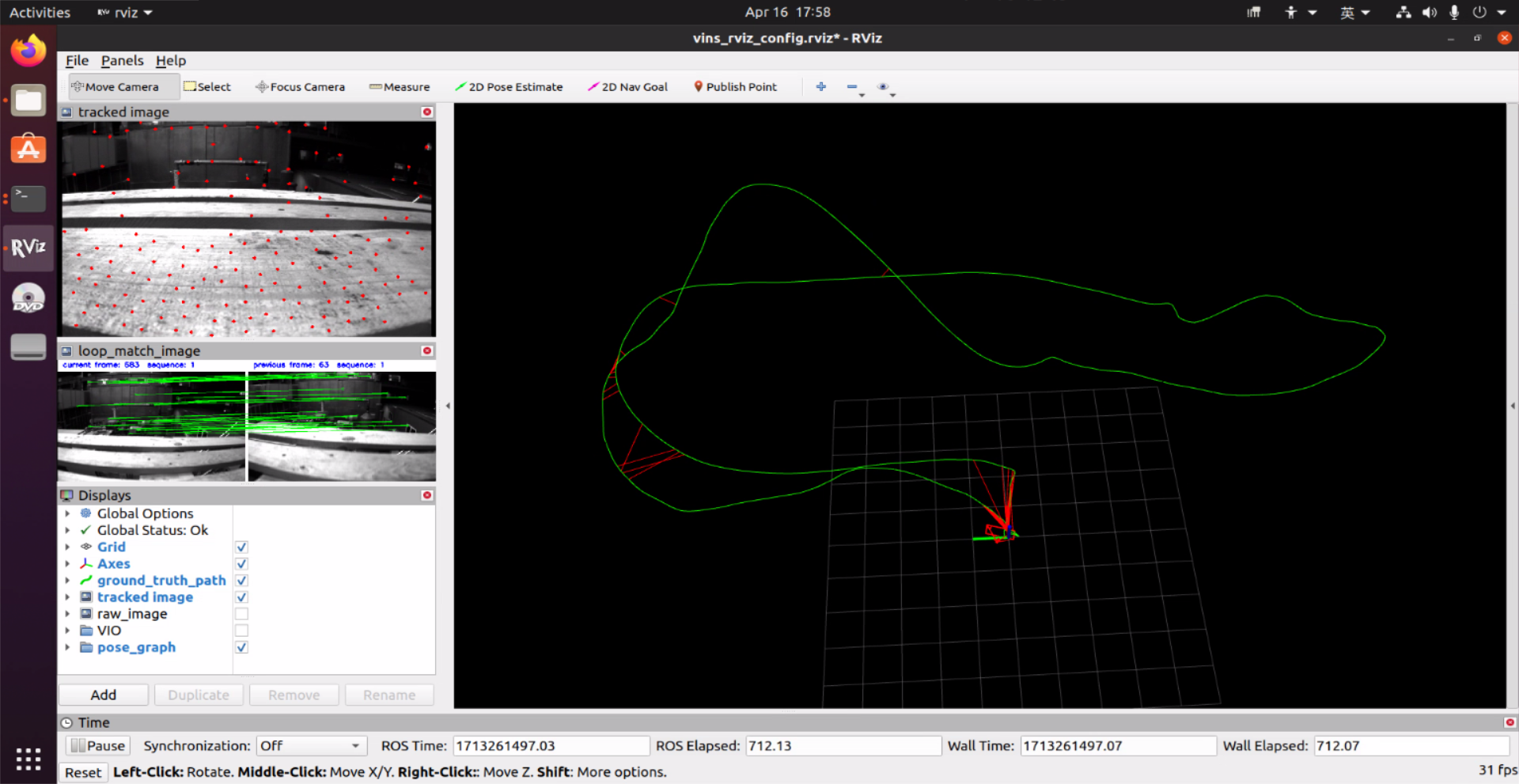

以上。