目标检测笔记
one-stage和two-stage目标检测算法
在计算机视觉领域,目标检测算法大致可以分为两类:one-stage算法和two-stage算法。这两种算法各有其特点和应用场景。
Two-Stage 目标检测算法
Two-stage算法的主要特点是分两步进行目标检测:1.首先生成潜在的感兴趣区域(Regions of Interest, RoI),2.然后在这些区域上执行分类和边框回归。
R-CNN(Regions with CNN features)
- R-CNN是较早的一种使用深度学习的目标检测算法,它首先使用选择性搜索生成候选区域,然后对每个区域使用卷积神经网络提取特征,最后通过SVM进行分类和线性回归模型进行边框精修。
Fast R-CNN
- Fast R-CNN在R-CNN的基础上进行了改进,使用RoI Pooling快速提取每个候选区域的特征,并集成了特征提取、分类和边框回归于一个网络中,大大提高了效率。
Faster R-CNN
- Faster R-CNN进一步改进,引入了区域建议网络(Region Proposal Network, RPN)替代传统的选择性搜索,使得候选区域生成和目标检测可以在同一个网络中端到端训练。
One-Stage 目标检测算法
One-stage算法则是直接在图像上进行目标分类和边框回归,不需要第一阶段的候选区域提取,速度通常更快。
YOLO(You Only Look Once)
- YOLO算法将目标检测任务视为一个回归问题,直接在整张图像上预测多个边界框和类别概率。由于其速度快,适用于实时目标检测场景。
SSD(Single Shot MultiBox Detector)
- SSD同时使用不同尺寸的特征图来改进检测精度,可以更好地检测不同尺寸的对象。SSD通过在多个特征图上预测类别和边框,优化了YOLO的结构。
RetinaNet
- RetinaNet引入了Focal Loss,解决了在训练中正负样本不平衡的问题,提高了检测小目标的精确度。
总结来说,two-stage算法通常精度较高,适合精度要求高的应用场景;而one-stage算法速度更快,适合需要实时处理的场景。两者各有优劣,选择哪种算法取决于具体的应用需求。
既然Faster R-CNN使得候选区域生成和目标检测可以在同一个网络中端到端训练,为什么它还是属于Two-stage算法?
Faster R-CNN 仍然被归类为 Two-stage 算法,原因在于它处理目标检测任务时的两个明显阶段:首先生成候选区域,然后对这些区域进行分类和边框回归。
区域建议网络(Region Proposal Network, RPN): Faster R-CNN 的第一阶段是利用区域建议网络生成候选区域。RPN 是一个全卷积网络,可以扫描整个图像,并输出一系列候选对象边框(称为锚框)。每个锚框都会被打分以判断是否含有对象。
候选区域分类与回归: 在第二阶段,Faster R-CNN 对这些由 RPN 提供的候选区域进行进一步的处理。这包括提取每个候选区域的特征,使用这些特征来分类候选区域中的对象,并调整边框的位置(边框回归)。这个阶段使用的是另一个网络,通常结合了全连接层。
尽管 Faster R-CNN 使候选区域生成和目标检测可以在同一个网络中端到端训练,但整个过程仍然涉及两个明确分开的计算阶段。这与 Single-stage 算法(如 SSD 和 YOLO)不同,后者直接在单个网络中进行目标的分类和边框回归,无需预先生成候选区域。因此,Faster R-CNN 虽然在训练和推断时更为高效,但其结构上的两个阶段决定了它仍然是一个 Two-stage 算法。
也就是说 “在同一个网络中端到端训练”指的是卷积计算特征图对于候选区域生成和目标检测而言是用同一个网络,而之后对特征图进行候选区域生成和目标检测是两个不同的网络,一个是RPN,一个是用于目标检测的网络,对吗?
是的,你的理解是正确的。在 Faster R-CNN 中,“在同一个网络中端到端训练”确实意味着基础的卷积网络(通常为预训练的网络,如 VGG 或 ResNet)被用于同时计算用于候选区域生成(通过区域建议网络,RPN)和目标检测的特征图。这种设计允许特征图只需计算一次,然后被共享给两个阶段的不同部分,从而提高效率。
具体来说:
共享特征图: 图像首先通过一系列卷积层处理,这些层生成的特征图会被后续的 RPN 和目标检测网络共用。这意味着无需对图像进行多次独立的特征提取,从而节省计算资源和时间。
区域建议网络(RPN): 一旦有了共享的特征图,RPN 会在此基础上工作,生成对象候选区域的建议(即锚框及其得分)。RPN 本身是一个小型网络,通常包括一些卷积层和全连接层,专门用于评估特征图中的每个位置是否可能包含对象。
目标检测网络: 接着,这些候选区域被送入另一个网络(通常是一些全连接层),这个网络负责对每个候选区域进行更细致的分类和边框回归。这个阶段利用了所谓的 RoI Pooling(Region of Interest Pooling)技术来从共享特征图中精确提取与候选区域相对应的特征。
尽管这些组件在物理上可能位于同一整体网络结构内,并且可以共同进行训练和优化,但从逻辑和功能上来看,RPN 和目标检测网络处理的任务是区分开的,因此 Faster R-CNN 仍然被分类为 Two-stage 算法。
目标检测模型,训练中的正负样本是什么?
目标检测中,正负样本是相对于候选区域(regions或region proposals)而言的。这些候选区域通常是由算法(如区域建议网络 RPN 在 Faster R-CNN 中)生成的,目的是从整个图像中预选出可能包含目标的区域。
是的,正确理解了!在目标检测中,正负样本是相对于候选区域(regions或region proposals)而言的。这些候选区域通常是由算法(如区域建议网络 RPN 在 Faster R-CNN 中)生成的,目的是从整个图像中预选出可能包含目标的区域。
正样本:是指那些与标注的真实对象有较高重叠(根据 IoU 指标)的候选区域。这些区域被认为是检测到的真实对象,因此在训练过程中用于教导模型如何正确识别和定位目标。
负样本:则是那些与真实对象重叠很低或没有重叠的候选区域,它们主要包含背景或非目标元素。这些区域在训练过程中用于教导模型识别和忽略不包含目标的区域。
这种区分方法允许目标检测模型学习区分目标和背景,并对每个候选区域做出是否包含目标的判断。因此,正负样本的定义和选择对于训练一个高效和准确的目标检测模型至关重要。
在目标检测模型的训练过程中,正负样本的概念是非常重要的,这些样本帮助模型学习区分目标对象和背景。这里的**“正样本”和“负样本”主要是指它们与实际目标对象的关联性**:
正样本(Positive samples): 正样本通常是那些与真实目标对象有重叠或接近真实对象位置的候选区域。在目标检测中,这些样本对应于包含或正确识别目标对象(如人、车辆等)的区域。具体来说,一个正样本通常定义为与任何真实标注对象有一定比例(如 Intersection over Union, IoU)重叠的候选区域。这个重叠阈值通常设定在一定的比例,如0.5或更高,这意味着候选区域至少要与真实对象有50%以上的重叠才被视为正样本。
负样本(Negative samples): 负样本是那些与真实目标对象重叠很少或根本没有重叠的候选区域。这些区域通常被认为只包含背景信息,不包含任何感兴趣的目标对象。在训练中,负样本帮助模型学习如何区分背景和非目标区域,从而减少误检。例如,一个负样本可能定义为与任何真实对象的IoU低于某个阈值(例如0.3或更低)的候选区域。
在目标检测任务中,正确的正负样本平衡是非常关键的,因为这直接影响到模型的性能。如果训练数据中负样本远多于正样本,模型可能倾向于偏向预测更多的背景,从而忽视真正的对象;反之,如果正样本过多,可能导致模型过于敏感,增加误检的可能。因此,设计有效的样本选择策略和调整正负样本的比例是提高目标检测模型性能的重要方面。
YOLO 中的正负样本
在 YOLO 模型中,正负样本的概念与基于 region proposals 的模型略有不同。YOLO 不使用传统意义上的候选区域的方式来训练和预测。相反,它在图像中定义了一个网格,并在每个网格单元中预测多个边界框和相应的置信度和类别概率。
正负样本定义
在 YOLO 中:
- 正样本:通常是指那些预测的边界框,它们成功地与真实标注的对象边界框有较高的交并比(IoU)。如果某个预测的边界框与任何一个真实边界框的 IoU 超过某个阈值(例如,通常使用的阈值是 0.5),那么这个预测框就被视为正样本。
- 负样本:如果预测的边界框与任何真实边界框的 IoU 很低(低于某个较低的阈值,比如 0.3 或更低),则这个预测框被视为负样本。
YOLO 的训练过程
在训练过程中,每个网格单元都可以预测多个边界框,但通常只有一个边界框(与真实对象最匹配的那个)被用来计算损失并优化模型。这种方法使得 YOLO 可以直接在预测中整合边界框的位置、尺寸、置信度和类别概率。
YOLO 的损失函数结合了以下几个部分:
- 边界框坐标的误差。
- 置信度误差(对于有目标的预测框和无目标的预测框都会计算,其中无目标的预测框的置信度应接近零)。
- 类别概率误差(只在包含目标的预测框中计算)。
总结
因此,YOLO 中的“正样本”和“负样本”不是预先定义的区域或锚框,而是通过模型预测的边界框与真实边界框之间的匹配程度来动态确定的。这种设计减少了需要处理的候选区域的数量,同时也简化了整个检测流程,使模型能以非常高的速度运行。
YOLO模型是否属于基于Region Proposals的目标检测模型?
不,YOLO(You Only Look Once)模型并不属于基于 Region Proposals 的目标检测模型。YOLO 是一个 Single-stage 的目标检测模型,与基于 Region Proposals 的 Two-stage 模型(如 R-CNN 系列)有显著不同。
YOLO 的主要特点包括:
全图一次性预测:YOLO 通过将图像分割成一个个格子(cells),每个格子直接预测其中的边框(bounding boxes)和类别概率。这种方法与传统的先生成候选区域再进行分类和边框精调的方法不同。
速度快效率高:由于YOLO是一次性对全图进行分析,不需要先生成候选区域,因此它在进行目标检测时速度非常快,非常适合实时系统。
训练和预测一体化:YOLO将目标检测任务简化为一个单一的回归问题,从图像像素直接到边框坐标和类别概率的预测。这种端到端的训练方式简化了学习过程,减少了模型训练和推断的时间。
总之,YOLO模型通过直接在图像上预测目标的位置和类别,避免了传统两阶段方法中生成和处理候选区域的步骤,因此它不是基于 Region Proposals 的目标检测模型。
如果YOLO模型中,某一个cell中仅包含背景,不包含object,那么该cell是否会进行边界框预测和类别概率预测?
在 YOLO 模型中,每个 cell 都负责预测一定数量的边界框和对应的类别概率,无论它是否实际包含目标(object)。这意味着,即使一个 cell 中只包含背景信息,不包含任何目标,它依然会进行边界框预测和类别概率预测。
具体地说:
边界框预测:每个 cell 都会预测多个边界框(bounding boxes),每个边界框包含位置(通常是中心点坐标、宽度和高度)和置信度(confidence score)。置信度表示该边界框中存在目标的概率乘以预测框与真实框之间的 IoU(交并比)。
类别概率预测:每个 cell 还会预测各个类别的概率。这个概率表明,如果该 cell 中确实包含目标,目标属于各个类别的概率。
如果一个 cell 中仅包含背景,那么理论上:
- 该 cell 的边界框置信度应该接近于零,因为没有目标,所以预测框与真实框的 IoU 应该也接近零。
- 类别概率也应该显示出很低的值,因为没有目标存在。
在实际应用中,YOLO 模型通过训练学习到哪些特征与目标存在或不存在相关联。模型的设计目的是最大化检测目标的准确性,同时尽量减少对背景的误识别。因此,对于只包含背景的 cells,尽管它们执行了预测过程,但预测结果的置信度和类别概率都应该表明没有目标存在。这是通过训练数据中大量的背景样本和相应的损失函数优化实现的,以确保背景被正确分类且不产生误检。
YOLO目标检测模型中,解耦的head是什么意思?
在 YOLO(You Only Look Once)目标检测模型中,“解耦的head”(decoupled head)通常指的是对模型的预测头部进行结构上的分离和优化,使得不同任务(如分类和定位)可以更独立和专门地进行学习和预测。这种方法有助于改善模型的性能和效率,尤其是在处理复杂的目标检测任务时。
在标准的YOLO模型中,预测头(head)通常负责同时进行类别预测、边界框坐标预测和目标置信度预测。这些任务是紧密耦合的,共享相同的特征提取层和预测层。然而,在解耦的设计中,模型会将这些任务分开处理:
- 分类头:专门负责判断图像中的物体属于哪个类别。
- 定位头:专门负责预测物体的位置和大小(通常是边界框的坐标)。
- 置信度头:评估预测的边界框中是否真实存在物体的置信度。
解耦的头部设计可以提高模型在各个任务上的专业性和精确度,因为每个头部可以独立优化,使用不同的网络结构和损失函数来适应其特定的预测任务。这种方法还可以帮助减少模型训练中的参数冗余和过拟合问题,从而提高模型的泛化能力。
在YOLO目标检测模型中,Backbone通常提取特征,Neck进行特征融合和池化。那么Head层和Prediction层的区别是什么?
在 YOLO 目标检测模型中,Backbone、Neck、Head 层和 Prediction 层的概念通常指的是模型架构中不同的部分,每个部分都有其独特的功能和责任。下面是这些部分的具体作用以及 Head 层与 Prediction 层之间的区别:
Backbone: 这是模型的主体部分,通常采用预训练的卷积神经网络(如 ResNet、DarkNet、VGG 等),负责提取图像的基本特征。Backbone 从输入图像中提取低级到高级的特征。
Neck: Neck 部分位于 Backbone 和 Head 之间,主要负责特征的融合和增强。在很多目标检测模型中,尤其是在 YOLO 中,Neck 通常包括一些特征金字塔网络(FPN)或其他类似结构,用于融合不同层次的特征,使模型能够同时处理不同大小的物体。
Head: Head 层是指紧接在 Neck 之后的一系列网络层,这些层负责根据融合后的特征进行具体的任务预测,例如物体分类、边界框的回归以及物体存在的置信度预测。在 YOLO 系列模型中,Head 层通常包括多个独立的小网络,每个都针对上述某个具体的任务。
Prediction Layer: 这通常是模型的最后一层,负责将 Head 层的输出转换成最终的预测结果。在 YOLO 中,这包括将分类、边界框坐标和置信度转换成标准格式,并应用例如非极大抑制(NMS)等后处理技术以去除重复检测和提高检测精度。
Head 层与 Prediction 层的区别:
- Head 层:更加关注于从特征中直接预测目标类别、位置和置信度等,通常具有多个输出,每个输出专门处理一个特定类型的预测。
- Prediction 层:则是将这些预测输出转化为最终用户可以直接使用的格式,包括坐标转换、阈值过滤和后处理等。
简单来说,Head 层负责从特征中生成原始的预测结果,而 Prediction 层则负责将这些结果转换和精练成最终的、可用的检测结果。
reorg降采样操作
reorg降采样操作是一种在神经网络中处理特征图的技术,尤其在处理卷积神经网络(CNN)中的图像数据时常见。这种操作通常用于改变特征图的尺寸和维度,使其适应网络的后续层。Reorg降采样操作具体可以通过以下几个步骤进行说明:
特征图分割:将输入的特征图分割成更小的块或区域。例如,一个特征图可以分割成多个2x2的小块。
数据重排:将这些小块的数据重新排列组合。通常,这一步涉及将每个小块的像素或特征按一定的顺序排列到一个新的特征图中。
通道调整:在重排数据的同时,还会调整通道数。例如,如果原始特征图的每个小块是2x2,总共有C个通道,那么在reorg操作之后,每个2x2的小块将被压扁或展开成一个单独的通道,通道数变为原来的4倍,因此新的通道数为4C。
降采样:Reorg操作可能伴随降低空间分辨率的效果,即整体特征图的宽度和高度可能减小。
Reorg降采样操作的主要目的是为了保留空间信息和增加模型对空间变换的鲁棒性,同时增加特征的复用性。这种技术在YOLO(You Only Look Once)这类实时目标检测算法中非常常见,用于从不同尺度的特征图中提取有用的信息,以改善检测性能。在YOLOv2版本中,这种技术被用来将低分辨率的特征图与高分辨率的特征图进行有效整合,从而在目标检测任务中达到更好的精度和速度的平衡。
R-CNN 方法
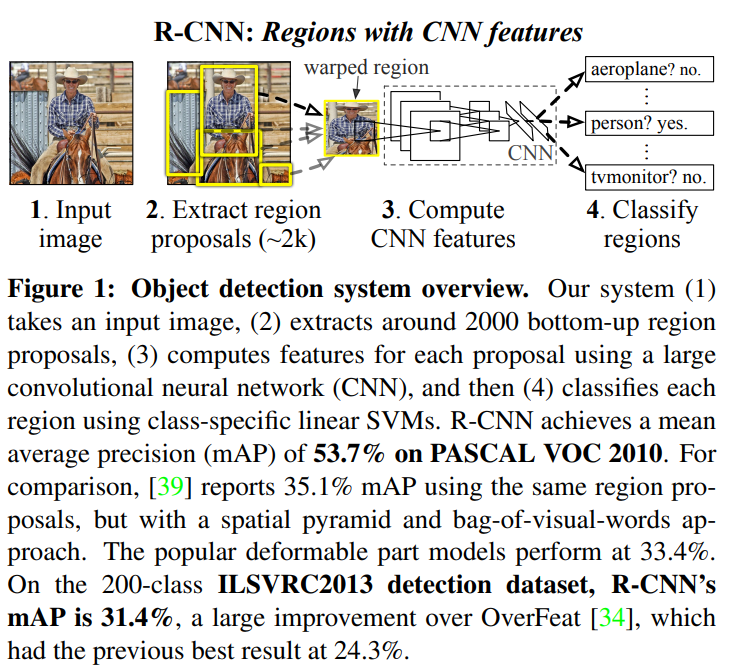
R-CNN(Regions with Convolutional Neural Network features)是一种用于目标检测的方法,它结合了传统的图像分割方法和深度学习。根据配图的步骤,以下是R-CNN方法的详细解释:
输入图像: 系统接收一幅待检测的图像。
提取区域提议: 使用选择性搜索算法从输入图像中提取大约2000个底层区域提议(region proposal)。这些区域提议是可能包含目标对象的矩形区域。
计算CNN特征: 每个区域提议被缩放(或扭曲)到固定大小,这样它们就能被送入预训练的卷积神经网络来提取特征。每个区域提议都转换成一个高维特征向量。
分类区域: 提取的特征向量被送到一系列类别特定的线性支持向量机(SVM)进行分类。每个SVM决定一个区域是否包含它特定的类别。
最后,这个方法会输出每个区域提议的类别(如果有的话)以及它们的置信度分数。由于每个区域都是独立处理的,R-CNN可以生成多个重叠的提议区域,这些区域需要进一步的处理来合并或选择最佳的预测。
在R-CNN中,每个region proposal被单独处理以计算CNN特征。对于每个提出的区域,R-CNN首先将其变形或裁剪到CNN所需的输入尺寸。然后,它独立地通过CNN运行每个区域,以便提取特征。这些特征随后被用作后续分类步骤的输入。
R-CNN原始论文中所述的RoI是什么?
在R-CNN(Regions with Convolutional Neural Networks)原始论文中,RoI(Region of Interest)指的是图像中可能包含目标的区域。
R-CNN的核心思想是首先使用选择性搜索(selective search)算法从图像中提取出大量的候选区域,然后这些区域就被称为“感兴趣区域”或RoI。
每个RoI是一个提议的边界框(bounding box),可能包含一个或多个对象。这些RoI接着被送入一个预训练的卷积神经网络,网络会对每个RoI进行特征提取。提取的特征随后被用于训练支持向量机(SVM)分类器,以识别候选区域中是否存在特定类别的对象。此外,还会使用线性回归模型对候选框进行精细调整,以更准确地预测对象的位置。
简而言之,RoI在R-CNN中起到了非常关键的作用,它们是检测流程中的基础,用于识别和定位图像中的潜在目标对象。
Region proposal和Region of Interest (RoI) 的区别
Region proposal和Region of Interest (RoI)是密切相关但有细微差别的概念。
Region Proposal(区域提议):
- 这是目标检测算法的第一步,其目的是生成可能包含对象的图像区域的提议列表。
- 这些提议是通过一些算法生成的,如选择性搜索或边缘盒子(EdgeBoxes),它们不关心类别,只是根据图像特征如纹理、颜色或边缘信息来确定可能存在对象的区域。
- 这些提议的数量通常很多,目的是尽可能不遗漏任何真正的对象,即便这意味着会有很多错误的提议(假阳性)。
Region of Interest (RoI):
- RoI是一个更广泛的术语,指的是图像中的任何感兴趣的区域。
- 在目标检测的上下文中,RoI通常是指已经被网络进一步处理过的区域提议,例如,在Fast R-CNN中,RoI是在经过区域提议之后,通过RoI Pooling层处理得到固定尺寸特征映射的区域。
- RoI的处理通常涉及到把它们送入后续的网络结构中,进行分类和边界框回归等操作。
在某些上下文中,这两个术语可能可以互换使用,但严格来说,区域提议是RoI的一个子集——所有RoI都是区域提议,但不是所有区域提议最终都会被识别为感兴趣的区域。
Fast R-CNN 方法

Fast R-CNN是一个在对象检测中使用的卷积神经网络架构,它是R-CNN的改进版,用于更快地检测图像中的对象。下面是对配图中Fast R-CNN方法的详细解释:
输入: 系统接收一个输入图像,并且选择性搜索算法用于生成多个感兴趣区域(RoIs)。
特征提取: 输入图像被传递到一个深层卷积神经网络(ConvNet),这个网络负责提取图像的特征。这些特征被表示为一个深层的卷积特征图。
RoI投影: 每个RoI被映射(或投影)到卷积特征图上。这个过程包括计算RoI在特征图上的对应位置。
RoI池化层: 投影到特征图的RoI经过一个RoI池化层,该层将每个RoI转换成一个固定大小的特征图。这一步是必须的,因为不同的RoI可能有不同的尺寸和长宽比,而全连接层需要固定大小的输入。
特征向量: RoI池化后的输出经过一系列全连接层(FCs)后被平铺成一个一维特征向量,然后这个向量作为分类和边界框回归的输入。
输出向量: 网络产生两个输出向量:一个用于分类的softmax概率输出和一个用于边界框回归的输出。Softmax输出将RoI分类为不同的对象类别,而边界框回归器调整RoI的大小和位置以更准确地包围检测到的对象。
多任务损失: Fast R-CNN训练的过程中使用了一个多任务损失函数,这个函数结合了分类损失和边界框回归损失。这意味着网络同时学习分类对象和精确定位它们。
总体上,Fast R-CNN对R-CNN的改进主要在于使用了RoI池化和一次通过网络即可提取所有RoI特征的方法,这大大提高了效率,因为它避免了对每个候选区域重复进行特征提取的需要。此外,所有的步骤都是在单个网络中完成的,允许所有操作都能通过反向传播来进行优化,这也就意味着Fast R-CNN可以被端到端地训练。
总结Fast R-CNN相比R-CNN所做的改进
Fast R-CNN对R-CNN进行了几项关键的改进,以提高效率和性能:
单一的、共享的CNN特征图:
- Fast R-CNN通过整个图像只运行一次CNN来生成一个共享的特征图。这与R-CNN不同,在R-CNN中,每个region proposal都需要独立地重新运行CNN来提取特征,这导致大量的重复计算。
RoI Pooling:
- 在特征图上,Fast R-CNN使用了RoI池化层来提取固定大小的特征区域,这允许网络处理不同大小的proposals。这种方法替代了R-CNN中对每个proposal进行缩放和单独CNN处理的步骤。
端到端的训练:
- Fast R-CNN可以在单个步骤中学习到分类和边界框回归,而R-CNN需要多个阶段的训练,先用CNN提取特征,再用SVM分类,最后训练一个单独的回归器来精细调整边界框。
多任务损失:
- Fast R-CNN采用了一个多任务损失,这个损失同时考虑了分类和边界框回归的损失。这意味着网络可以同时优化这两个任务,而在R-CNN中,这些任务是分开进行优化的。
更高的速度和精度:
- 由于计算效率的提高和训练过程的改进,Fast R-CNN不仅比R-CNN快,而且还提高了精度。
内存效率:
- Fast R-CNN使用的是一个批处理策略来处理多个proposals,这使得它在内存使用上比R-CNN更有效率。
由于这些改进,Fast R-CNN成为了一个比原始R-CNN更快、更精确且更易于训练的目标检测框架。
Faster R-CNN
摘要
讨论了目标检测领域中的一些关键进展,特别是区域提案(region proposals)方法及其对目标检测网络性能的影响。下面是对这段内容的具体解释:
目标检测的进展:目标检测技术的最新进展很大程度上得益于区域提案方法和基于区域的卷积神经网络(RCNNs)。这些方法可以有效地预测图像中可能包含目标的区域,从而减少后续处理需要考虑的图像区域数量,提高了效率。
计算成本的降低:虽然早期的基于区域的卷积神经网络在计算上非常昂贵,但通过在多个提案间共享卷积计算(指在生成区域提案时共享整个图像的卷积特征图),大大降低了计算成本。Fast R-CNN就是利用这种技术实现了接近实时的处理速度,尤其是在使用非常深的网络结构时。
提案生成的瓶颈:尽管Fast R-CNN在处理速度上有所提高,但区域提案生成仍然是测试时的计算瓶颈。这是因为生成高质量的区域提案本身需要消耗大量计算资源。
区域提案方法:文中提到了两种流行的区域提案方法——Selective Search和EdgeBoxes。Selective Search通过基于工程化的低级特征贪婪合并超像素来生成提案,但其处理速度较慢,大约需要2秒钟处理一张图片。而EdgeBoxes提供了更好的速度与提案质量之间的权衡,处理一张图片大约需要0.2秒,虽然比Selective Search快,但在总的运行时间上仍与目标检测网络相当。
通过上述内容,了解到区域提案方法在目标检测中的重要性及其对整体检测系统性能的影响。同时,这也表明了进一步提高区域提案速度和效率的重要性,以便实现更快的目标检测系统。
Faster R-CNN 和核心贡献 - RPN
GPU与CPU的使用不均:传统的区域提案方法大多在CPU上实现,而基于区域的CNN(如Fast R-CNN)则在GPU上执行,这导致在运行时间的比较上存在不公平。简单地将提案计算移植到GPU上虽然可以加速,但这种方法忽视了与下游检测网络的计算共享的可能性,从而错失了提高总体效率的机会。
算法改变的提出:为了解决这一问题,作者提出了一种算法上的改变,即使用深度卷积神经网络来计算区域提案。这种方法不仅提升了计算提案的速度,而且由于与检测网络共享卷积特征,使得额外的提案计算成本几乎为零。
区域提案网络(RPN):RPN是一种全卷积网络(FCN),它在共享的卷积特征图上添加了几个额外的卷积层来同时回归区域边界和每个位置的对象性得分。这意味着RPN不仅用于生成区域提案,还能与检测网络共享卷积层,极大地提高了计算效率。在测试时,由于特征共享,计算一个图像的提案成本非常低(例如10毫秒/图像)。
端到端训练:RPN可以和检测网络一起端到端地训练,这进一步提高了提案质量和检测精度。这是通过在一个统一的网络框架中同时优化提案生成和对象检测任务来实现的。
总的来说,这段内容强调了通过算法创新(即引入RPN),在保持高检测精度的同时显著提高了目标检测系统的运行速度和效率。这也是Faster R-CNN相较于之前模型的主要改进之处。
附注:什么是全卷积网络FCN?
全卷积网络(FCN,Full Convolutional Network)是一种主要用于图像分割的深度学习架构。它首次在2015年由加州大学伯克利分校的研究者提出,并迅速成为图像分割领域的一个重要模型。这种网络结构的核心特点是将传统的卷积神经网络(CNN)中的全连接层转换为卷积层,从而使网络能够输出空间映射(spatial maps)而不是单一的预测值。这使得FCN可以接受任意尺寸的输入图像,并输出相应尺寸的分割图。
FCN的工作流程通常包括以下几个步骤:
卷积和下采样:使用多个卷积层和池化层来提取图像的特征,并逐渐减少特征图的空间尺寸。
卷积替代全连接层:在传统的CNN中,卷积层后通常会有几个全连接层用于分类。FCN将这些全连接层转换为卷积层,这使得网络可以保持空间信息,非常适合图像分割任务。
上采样和跳跃连接:通过上采样(反卷积)层将深层的、空间尺寸较小的特征图还原到输入图像的尺寸。同时,FCN利用跳跃连接(skip connections)结合不同层级的特征,以提高分割的精度和细节。
输出分割图:最终输出的是每个像素的类别预测,形成与输入图像相同尺寸的分割图。
FCN在许多视觉任务中展示了其强大的性能,尤其是在需要精细像素级预测的应用中,如医疗图像分析、道路检测、场景理解等领域。
区域提案网络(RPN)的设计理念、与Fast R-CNN的整合方法以及它对性能的影响。
这段内容详细介绍了区域提案网络(RPN)的设计理念、与Fast R-CNN的整合方法以及它对性能的影响。下面是对这段内容的逐点解释:
锚框(Anchor Boxes):RPN使用一种新颖的“锚框”概念,这些锚框在多种尺度和长宽比下作为参考。这与传统的使用图像金字塔(多尺度图像)或滤波器金字塔(不同尺寸的滤波器)的方法形成对比。锚框的使用可以简化训练和检测过程,因为它不需要对图像或滤波器进行多尺度的枚举,从而提高了运行速度。
回归参考的金字塔:作者将他们的方法描述为一种“回归参考的金字塔”,这意味着他们构建了一个以锚框为基础的多尺度、多比例的参考系统,而不是物理地改变输入图像或滤波器的尺寸。这样可以在训练和测试时使用单一尺度的图像,简化了计算过程。
训练方案:为了将RPN与Fast R-CNN整合为一个统一的网络,作者提出了一个交替微调的训练方案。这个方案先针对区域提案任务进行微调,然后固定提案并对目标检测任务进行微调。这种训练方式可以快速收敛,并且生成一个共享卷积特征的统一网络,这些特征同时服务于提案生成和目标检测。
性能评估:在PASCAL VOC检测基准上的综合评估表明,使用RPN和Fast R-CNN的组合比使用传统的Selective Search和Fast R-CNN的基线方法具有更高的检测精度。此外,由于RPN生成提案的计算负担大大减少,测试时的提案生成时间仅需10毫秒,大大减轻了传统Selective Search方法的计算压力。
常用的目标提案方法
目标提案方法大致可以分为两类:
- 基于超像素分组:这类方法通过对图像中的超像素进行分组来生成提案区域。例如,Selective Search利用颜色、纹理、大小等低级特征将相似的超像素合并,从而生成潜在的目标区域。CPMC(Constrained Parametric Min-Cuts)和MCG(Multiscale Combinatorial Grouping)也是此类的代表。
- 基于滑动窗口:这类方法通过在图像上滑动窗口并评估每个窗口内的“对象性”(objectness)来生成提案。这些窗口的大小和形状可能会变化以适应不同的目标。EdgeBoxes是一种典型的基于边缘信息来确定窗口“对象性”的方法。
目标提案方法的独立性:在较早的目标检测系统中,目标提案方法通常作为独立于检测器的外部模块实现。这意味着目标提案和实际的目标检测是分开进行的,如使用Selective Search生成提案,然后再用R-CNN或Fast R-CNN等网络进行目标的分类和定位。这种设计允许使用各种不同的提案方法,但也增加了整体处理的复杂性和计算需求。
这段内容强调了目标提案方法在目标检测领域内的重要性以及多样性,同时也指出了其作为独立模块的传统应用方式,这在后续的发展中逐渐向更集成化的方法演进,如Faster R-CNN中的RPN就是一个集成目标提案与检测的典型例子。
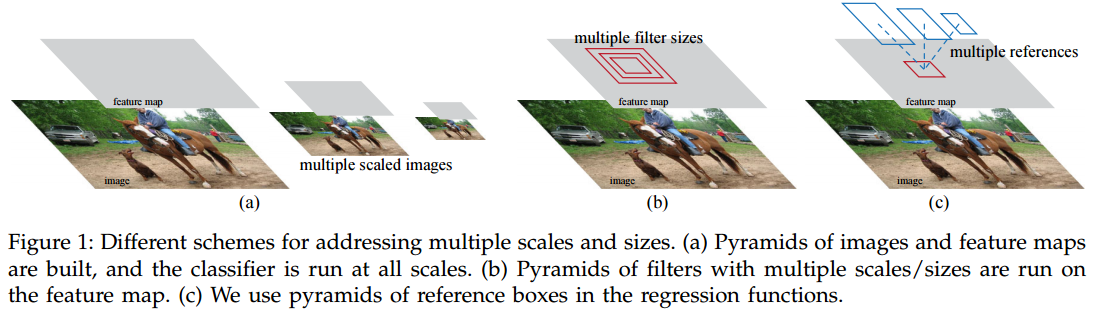
这张图演示了三种不同的处理图像中多个缩放后的多尺度图像的方法:
图中灰色区域代表一个特征图,
a) 图像金字塔(Pyramids of images):首先生成多个不同尺度的图像副本,然后对每个尺度的图像分别提取特征并运行分类器。这种方法会得到不同尺度的特征图。
b) 滤波器金字塔(Pyramids of filters):在单个尺度的特征图上运行不同尺寸的滤波器。这种方法尝试捕获不同大小物体的特征而不需要改变图像的尺寸。
c) 锚框金字塔(Pyramids of reference boxes,即Anchor boxes):作者提出的方法,在回归函数中使用不同尺度和宽高比例的参考框,称为“锚框”。这些锚框用于在单个尺度的特征图上预测可能包含物体的区域。这种方法通过引入不同大小和形状的锚框来解决多尺度问题,而不需要真的对图像或特征图进行尺度变换。
Anchor boxes 就是 Pyramids of reference boxes(参考框金字塔),对特征图的某个子区域图,用不同尺度和长宽比的多个Anchor boxes去预测该子区域最终的bounding box。
是的,您的理解是正确的。Anchor boxes本质上是一组预定义的框,它们以不同的尺度(scale)和长宽比(aspect ratio)存在。在特征图的每个子区域(通常是在特征图上的每个位置),这些anchor boxes被用来预测与真实物体最匹配的bounding boxes。
具体来说,在Faster R-CNN中,RPN会对每个位置的每个anchor box评估两件事:
- 一个分类分数(objectness score),表示这个anchor box内含有目标的概率。
- 四个坐标值(bounding box regression),用于调整anchor box的位置和大小,以更好地匹配真实的目标边界。
这样,通过对特征图的每个点的anchor boxes进行评估和调整,RPN能够高效地生成多尺度、多比例的目标提案区域。这一过程使得系统能够检测到不同大小和形状的物体,而不需要对整个图像进行多尺度处理,从而节省了大量的计算资源。
图中用不同形状的框来表示锚框,它们是预定的,并根据不同的尺度(大小)和长宽比(aspect ratios)来设计。这样,对于给定的输入特征图,可以有效地覆盖不同尺度和长宽比的物体,从而提高目标检测算法对物体大小和形状变化的适应性。此外,由于锚框是固定的,这种方法可以显著减少计算量,因为它避免了生成和处理多尺度图像或滤波器金字塔的需要。
Faster R-CNN目标检测系统的结构
这段内容概括了Faster R-CNN目标检测系统的结构,以及如何通过两个模块来完成检测任务。以下是对这段内容的具体解释:
Faster R-CNN的两个主要模块:
- 第一个模块:这是一个深度全卷积网络(deep fully convolutional network),它的作用是提出(propose)可能包含目标的区域,称为区域提案网络(Region Proposal Network, RPN)。
- 第二个模块:这个模块是Fast R-CNN检测器,它利用RPN提供的区域提案来识别具体的物体类别,并对每个提案的位置进行精确调整。
单一统一网络:尽管Faster R-CNN由两个主要模块组成,整个系统却是一个统一的网络,这两个模块在同一个深度学习架构中协同工作,共享卷积特征。
注意力机制:作者提到了“注意力”机制,这是一种流行的神经网络技术。在这里,RPN模块的作用类似于注意力机制,指导Fast R-CNN模块关注图像中哪些区域值得进一步分析。

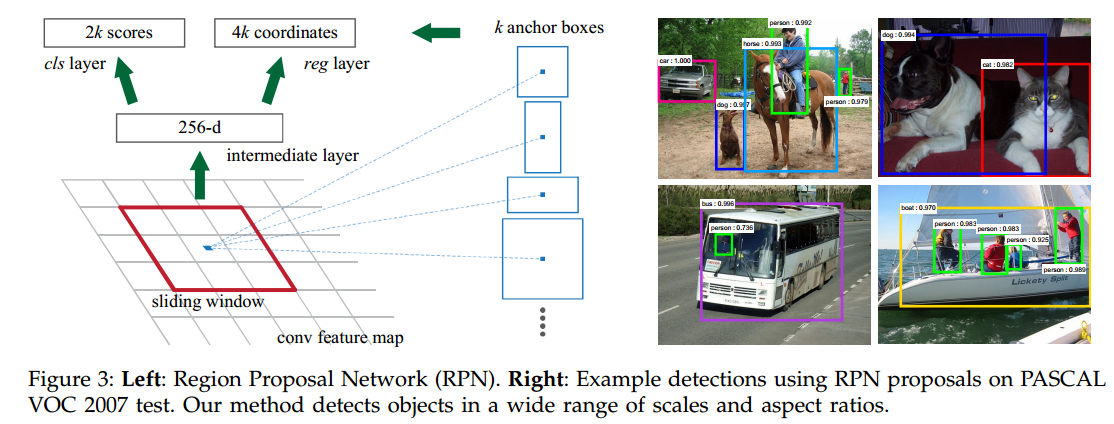
这张图演示了Faster R-CNN架构,展示了它如何作为一个单一、统一的网络来执行目标检测任务,包括区域提案网络(RPN)和后续的分类及边界框回归步骤。下面是这个图解的详细解释:
底部的图像和卷积层(conv layers):整个流程从一个输入图像开始,图像通过卷积层进行处理,生成特征图(feature maps)。这些卷积层负责捕获图像中的低级到高级特征。
区域提案网络(RPN):接下来,特征图被送入RPN。RPN在特征图上运行,使用一组锚框来生成对象的提案区域。这些提案区域预测哪里可能存在目标。
提案(proposals):RPN生成的提案是一组可能包含目标的边界框。每个提案都有一个得分,表明该区域内包含目标的概率。
感兴趣区域池化(RoI pooling):然后,这些提案被用于感兴趣区域池化层(RoI pooling),它从特征图中提取对应于每个提案的特征。RoI池化确保不同大小的提案被转换为统一大小的输出,以便可以用相同大小的全连接层进一步处理。
分类器(classifier):从RoI池化层提取出的特征被送到最后的分类器。分类器负责判定每个提案区域的具体类别,并进行边界框回归,以精确地定位目标。
图中的黄色箭头表示数据的流动和处理顺序。整个Faster R-CNN网络结构被训练来同时完成区域提案和目标检测的任务。RPN作为网络的“注意力”模块,指示后续网络应该关注图像中的哪些部分。这种设计实现了卷积特征的有效共享,提高了目标检测的速度和效率。
3.1 RPN
描述了区域提案网络(Region Proposal Network, RPN)的基本工作原理及其在Faster R-CNN中的角色。下面是详细的解释:
RPN的输入与输出:
- RPN能够处理任意大小的图像,并输出一系列矩形的对象提案(proposals),每个提案都附有一个“对象性”分数(objectness score),表明每个提案中存在目标的可能性。
全卷积网络的应用:
- RPN本身是一个全卷积网络(FCN),这意味着它不包含任何全连接层,使得网络能够接受任意尺寸的输入图像。
- 为了与Fast R-CNN目标检测网络共享计算,RPN被设计为可以共享卷积层。这样,卷积特征图只需计算一次,即可被RPN和Fast R-CNN共同使用。
模型的选择:
- 在实验中,作者考察了两种模型:Zeiler和Fergus模型(ZF)和Simonyan及Zisserman模型(VGG-16),分别具有5个和13个可共享的卷积层。
生成区域提案的过程:
- 通过在最后一个共享的卷积层输出的特征图上滑动一个小网络来生成提案。这个小网络在特征图上的每个n×n空间窗口上操作(在本文中n=3),从而覆盖整个特征图。
- 每个滑动窗口都会被映射到一个低维特征(ZF为256维,VGG为512维),并接入两个全连接层,即一个边框回归层(box-regression layer,reg)和一个边框分类层(box-classification layer,cls)。
架构的实现:
- 由于小网络以滑动窗口的方式操作,因此在所有空间位置上,两个全连接层实际上是共享的。这个架构通过一个n×n的卷积层实现,后面跟着两个1×1的卷积层,分别用于边框回归和分类。
有效接受字段(Effective Receptive Field):
- 对于ZF和VGG模型,由于使用了3×3的窗口,所以在输入图像上的有效接受字段分别是171像素和228像素。有效接受字段是指卷积神经网络中能够影响输出的输入图像区域的大小。
总的来说,RPN是Faster R-CNN中用于高效生成区域提案的关键组件,它利用全卷积架构和共享的卷积特征图,在检测流程中引入了计算上的高效性。通过在特征图上滑动小网络并使用全连接层的输出,RPN能够确定可能包含目标的区域以及这些区域包含目标的置信度。
3.1.1 Anchors