💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
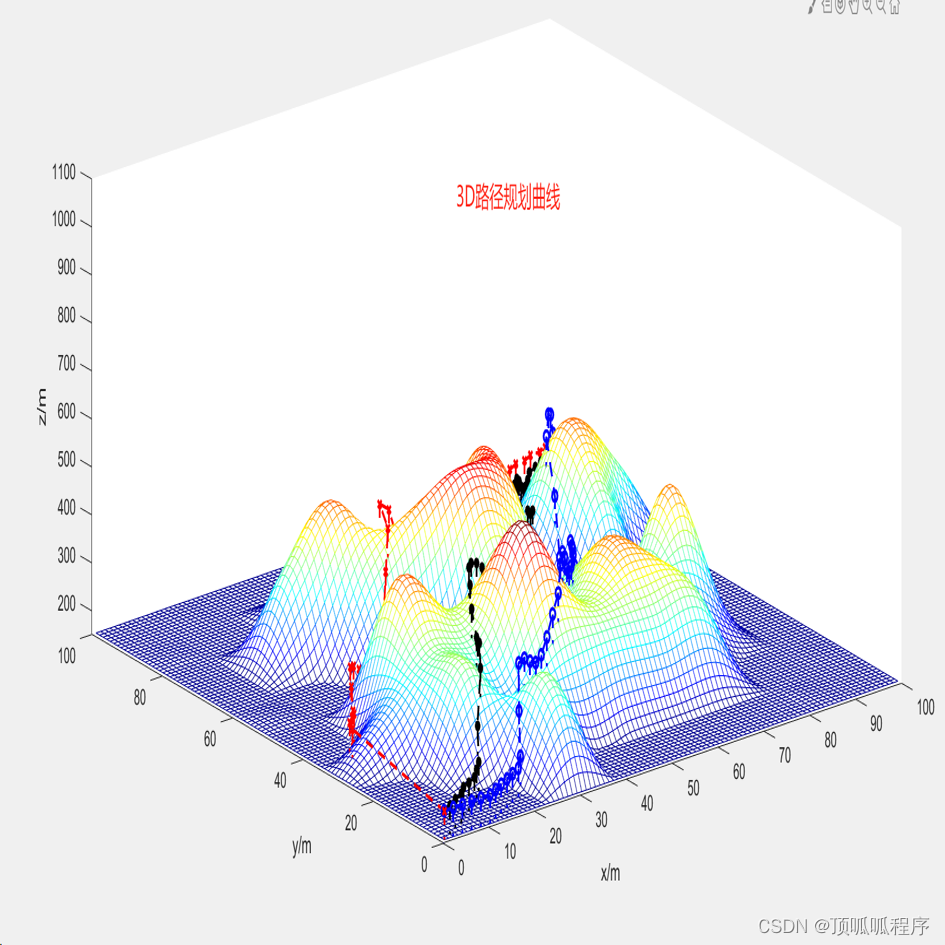
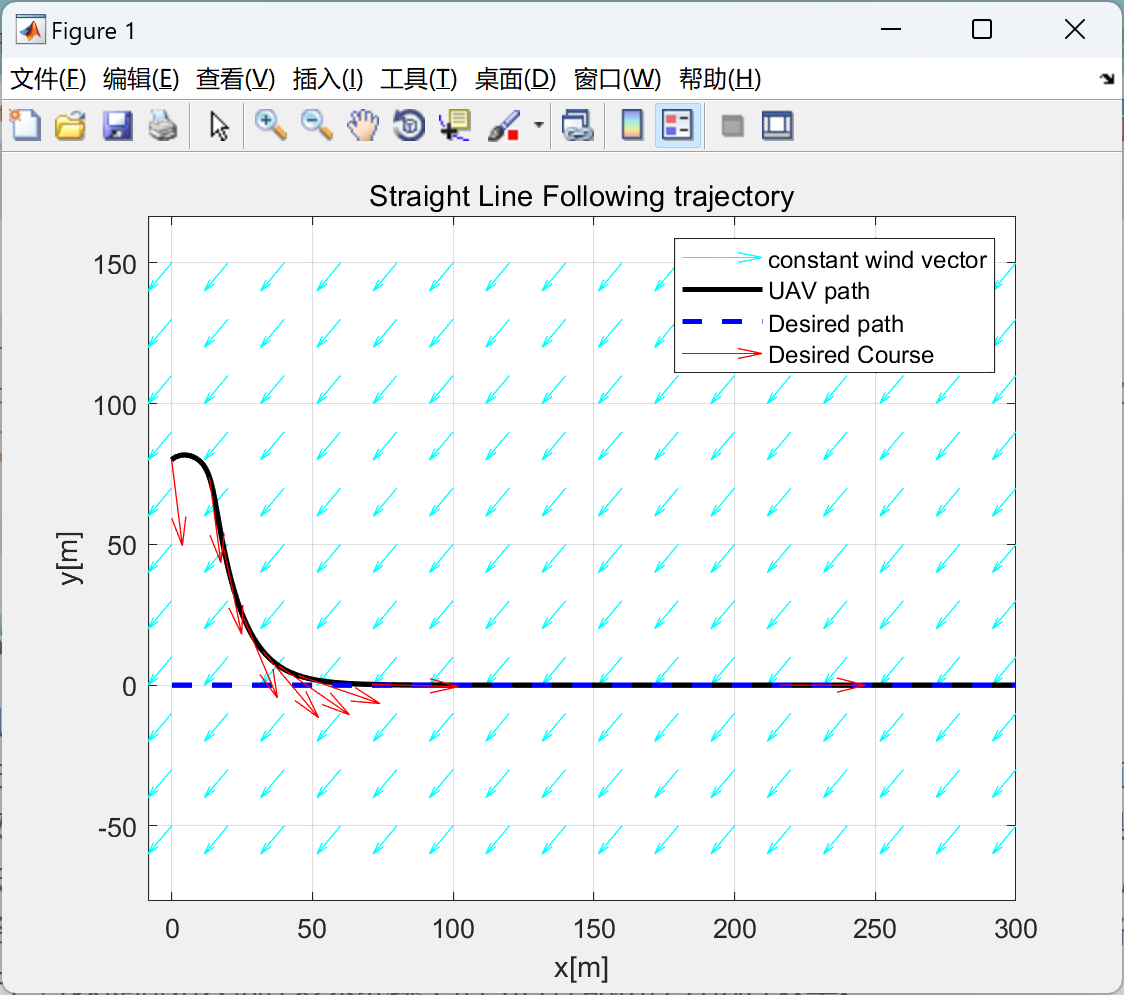
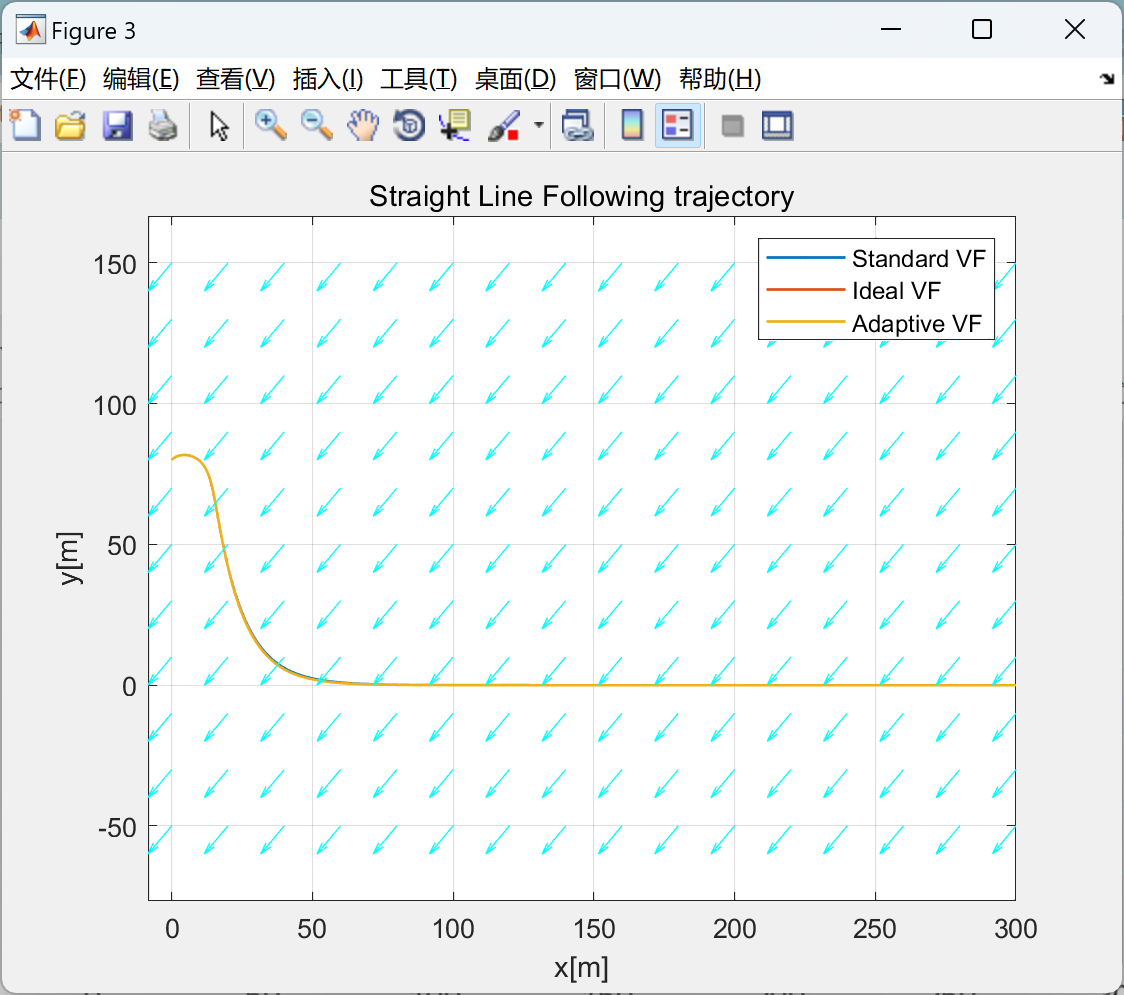
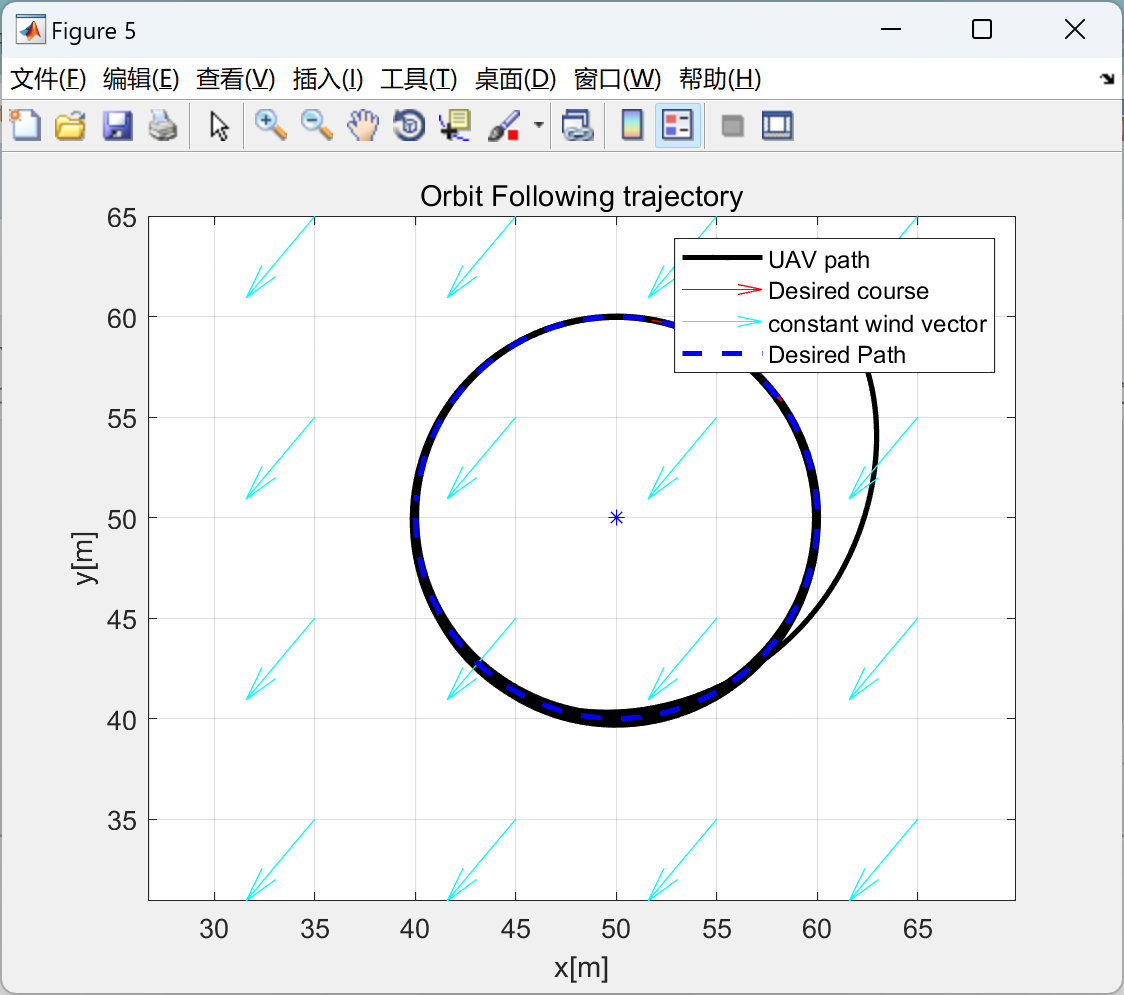
在时变风下,无人机需要实时调整其飞行路径以适应风力变化,同时保持对目标的跟随。 首先需要对风场进行建模,考虑风速、风向和风的时变性。 可以利用气象数据、风力传感器或数值模拟等手段来获取风场信息。 基于实时的风场信息,无人机需要规划适应性路径以实现对目标的跟随。 路径规划算法需要考虑风的时变性,预测未来风场变化并相应调整飞行路径。无人机在时变风下跟随策略的路径模拟涉及风场建模、路径规划、动态调整和风力补偿等关键技术,通过有效的路径模拟和仿真分析,可以提高无人机在复杂环境下的飞行性能和任务执行效率。
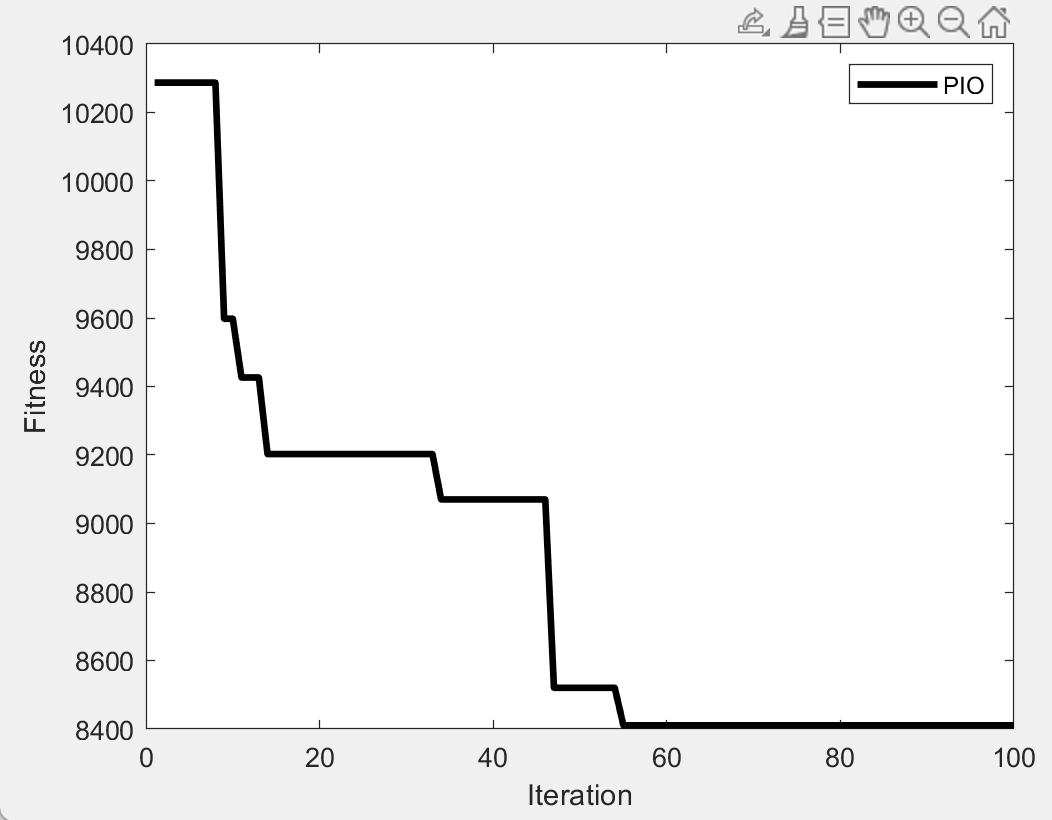
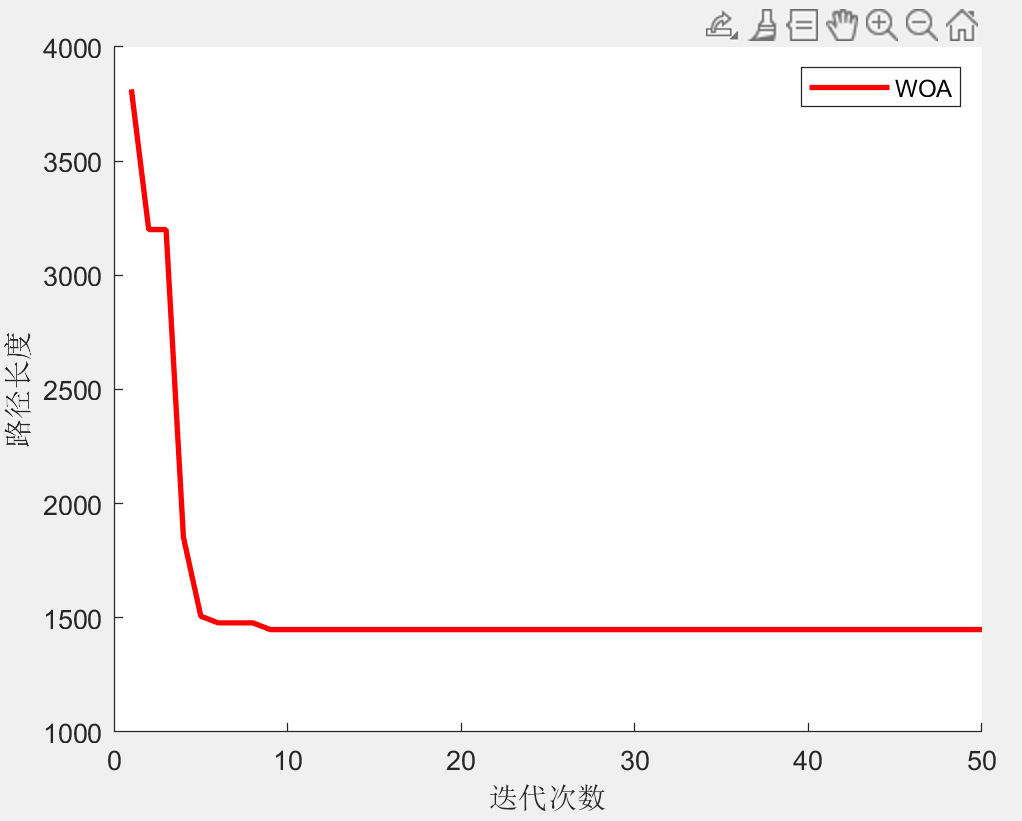
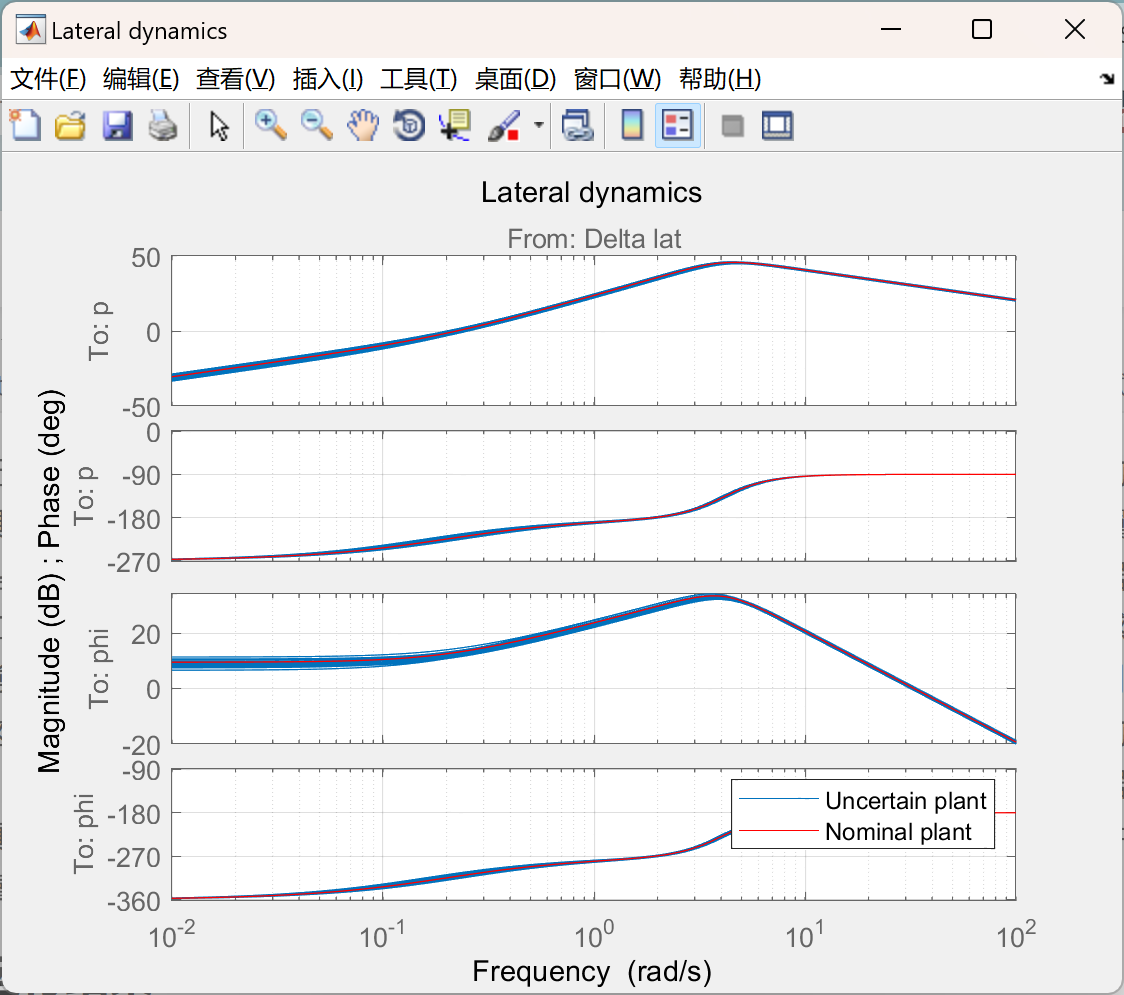
📚2 运行结果



部分代码:
close all;clear;clc;
%% Initialization
chi_inf = pi/2; %course angle far away from path (rad)
alpha = 1.65; %positive constant describe the speed of response of course
%hold autopilot loop (rad/s)
k = 0.1; %positive constant influence the rate of the transition from
%x_inf to zero, also control the slope of the
%sliding surface near the origin(m^-1)
kk = pi/2; %gain parameter controls the shape of the trajectories onto
%the sliding surface.(rad^2/s)
epsi = 0.5; %width of the transition region around the sliding surface
%which is used to reduce chattering in the control.(rad)
Gamma = 80; %Estimator gain for straight line
W = 6; %constant wind velocity(m/s)
phiw = 230/180*pi;%constant wind direction(rad)
Va = 13; %Longitudinal velocity(m/s)
A = 3; % Time varying wind's amplitude (variance)
phiA = pi; %Time varying wind's angle (variance)
%% ------------------------------------
% ---------Stright line following------
% -------------------------------------
% Initial conditions
x_int = 0;y_int = 80;course_int = pi/4;%Initial position and posture of UAV
ang = 0; a = 0;b = 0; % Course angle, slop and intercept of desired path
i=-1;% Directon of desired path (i = -1, go right, x increases; i = 1, go left, x decreases)
endx = 300;% stopping condition: the end value of x coordinate
Method =3;% 1: Beard's method, 2: Ideal method, 3: our method
% Initial value of Vg'
Vg0 = InitialVg(A,0,W,phiw,Va,course_int);
% simulation of stright line following
simout=sim('RevisedStraightLine');
% results
figure
[vfx,vfy] = meshgrid(0:20:300,-50:20:150);
wx = W*cos(phiw)*ones(size(vfx));
wy = W*sin(phiw)*ones(size(vfy));
quiver(vfx,vfy,wx,wy,0.5,'c','linewidth',0.5)
hold on
plot(x.data,y.data,'k','linewidth',2)
plot([0 300],[0 0],'--b','linewidth',2)
quiver(x.data(1:50:end),y.data(1:50:end),1*cos(chi_d.data(1:50:end)),1*sin(chi_d.data(1:50:end)),0.4,'r','linewidth',0.5)
title('Straight Line Following trajectory')
xlabel('x[m]')
ylabel('y[m]')
grid on
colormap(jet)
axis equal
legend('constant wind vector','UAV path','Desired path','Desired Course')
% comparison among Beard, ideal and ours
Method = 1; %Beard method
% simulation of stright line following
simout=sim('RevisedStraightLine');
error_M1 = rms(y.data(y.time>10))
figure
plot(y,'linewidth',1)
hold on
% plot([0 300],[0 300],'--b','linewidth',2)
figure
plot(x.data,y.data,'linewidth',1)
hold on
Method =2;% ideal method
simout=sim('RevisedStraightLine');
error_M2 = rms(y.data(y.time>10))
figure(2),plot(y,'linewidth',1)
figure(3),plot(x.data,y.data,'linewidth',1)
Method =3;% our method
simout=sim('RevisedStraightLine');
error_M3 = rms(y.data(y.time>10))
error_ss_M3 = rms(y.data(y.data<0.1))
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]卢元杰,陈星伊,苏大林,等.面向系统工程的无人机自主定位系统研究[J/OL].图学学报:1-7[2024-04-10].http://kns.cnki.net/kcms/detail/10.1034.T.20240403.1706.002.html.
[2]朱莉凯,李笑瑜,李红燕,等.基于产业学院的无人机应用技术人才培养对策分析[J].南方农机,2024,55(07):180-182.