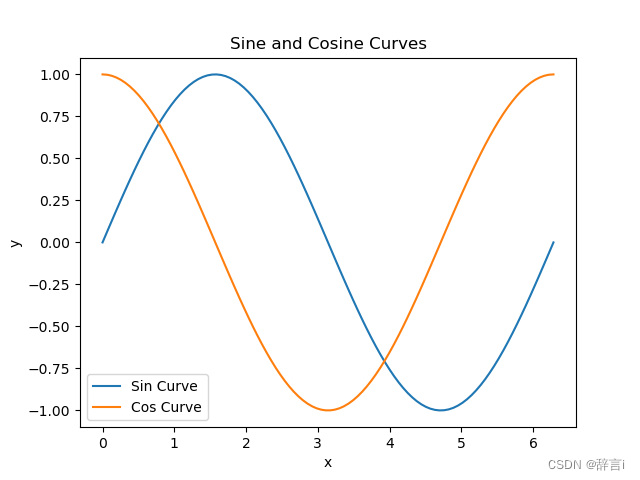
生成SIN_COS_TABLE
四分之一周期为256个点
#include <stdio.h>
#include <math.h>
#define POINT_NUM 256
#define PI 3.141592f
int main()
{
for (int i = 0; i < POINT_NUM; i++)
{
printf("[ %d:\t0x%04X ]", i, (unsigned int)(sin(i*PI/2 / POINT_NUM) * 32768));
if((i+1) % 8 == 0)
{
printf("\r\n");
}
}
}
通过查表计算sin和cos
#define SIN_MASK 0x0300u
#define U0_90 0x0200u
#define U90_180 0x0300u
#define U180_270 0x0000u
#define U270_360 0x0100u
typedef unsigned char uint8_t;
typedef short int int16_t ;
typedef int int32_t ;
typedef unsigned short int uint16_t;
#define SIN_COS_TABLE {\
0x0000,0x00C9,0x0192,0x025B,0x0324,0x03ED,0x04B6,0x057F,\
0x0648,0x0711,0x07D9,0x08A2,0x096A,0x0A33,0x0AFB,0x0BC4,\
0x0C8C,0x0D54,0x0E1C,0x0EE3,0x0FAB,0x1072,0x113A,0x1201,\
0x12C8,0x138F,0x1455,0x151C,0x15E2,0x16A8,0x176E,0x1833,\
0x18F9,0x19BE,0x1A82,0x1B47,0x1C0B,0x1CCF,0x1D93,0x1E57,\
0x1F1A,0x1FDD,0x209F,0x2161,0x2223,0x22E5,0x23A6,0x2467,\
0x2528,0x25E8,0x26A8,0x2767,0x2826,0x28E5,0x29A3,0x2A61,\
0x2B1F,0x2BDC,0x2C99,0x2D55,0x2E11,0x2ECC,0x2F87,0x3041,\
0x30FB,0x31B5,0x326E,0x3326,0x33DF,0x3496,0x354D,0x3604,\
0x36BA,0x376F,0x3824,0x38D9,0x398C,0x3A40,0x3AF2,0x3BA5,\
0x3C56,0x3D07,0x3DB8,0x3E68,0x3F17,0x3FC5,0x4073,0x4121,\
0x41CE,0x427A,0x4325,0x43D0,0x447A,0x4524,0x45CD,0x4675,\
0x471C,0x47C3,0x4869,0x490F,0x49B4,0x4A58,0x4AFB,0x4B9D,\
0x4C3F,0x4CE0,0x4D81,0x4E20,0x4EBF,0x4F5D,0x4FFB,0x5097,\
0x5133,0x51CE,0x5268,0x5302,0x539B,0x5432,0x54C9,0x5560,\
0x55F5,0x568A,0x571D,0x57B0,0x5842,0x58D3,0x5964,0x59F3,\
0x5A82,0x5B0F,0x5B9C,0x5C28,0x5CB3,0x5D3E,0x5DC7,0x5E4F,\
0x5ED7,0x5F5D,0x5FE3,0x6068,0x60EB,0x616E,0x61F0,0x6271,\
0x62F1,0x6370,0x63EE,0x646C,0x64E8,0x6563,0x65DD,0x6656,\
0x66CF,0x6746,0x67BC,0x6832,0x68A6,0x6919,0x698B,0x69FD,\
0x6A6D,0x6ADC,0x6B4A,0x6BB7,0x6C23,0x6C8E,0x6CF8,0x6D61,\
0x6DC9,0x6E30,0x6E96,0x6EFB,0x6F5E,0x6FC1,0x7022,0x7083,\
0x70E2,0x7140,0x719D,0x71F9,0x7254,0x72AE,0x7307,0x735E,\
0x73B5,0x740A,0x745F,0x74B2,0x7504,0x7555,0x75A5,0x75F3,\
0x7641,0x768D,0x76D8,0x7722,0x776B,0x77B3,0x77FA,0x783F,\
0x7884,0x78C7,0x7909,0x794A,0x7989,0x79C8,0x7A05,0x7A41,\
0x7A7C,0x7AB6,0x7AEE,0x7B26,0x7B5C,0x7B91,0x7BC5,0x7BF8,\
0x7C29,0x7C59,0x7C88,0x7CB6,0x7CE3,0x7D0E,0x7D39,0x7D62,\
0x7D89,0x7DB0,0x7DD5,0x7DFA,0x7E1D,0x7E3E,0x7E5F,0x7E7E,\
0x7E9C,0x7EB9,0x7ED5,0x7EEF,0x7F09,0x7F21,0x7F37,0x7F4D,\
0x7F61,0x7F74,0x7F86,0x7F97,0x7FA6,0x7FB4,0x7FC1,0x7FCD,\
0x7FD8,0x7FE1,0x7FE9,0x7FF0,0x7FF5,0x7FF9,0x7FFD,0x7FFE}
const int16_t hSin_Cos_Table[256] = SIN_COS_TABLE;
typedef struct
{
int16_t hCos;
int16_t hSin;
} Trig_Components;
/**
* @brief 函数计算cos和sin的值
* @param hAngle: q15格式的角度值 (-1~0.9999)
* @retval
*/
Trig_Components trig_functions( int16_t hAngle )
{
int32_t shindex;
uint16_t uhindex;
Trig_Components Local_Components;
//10 位index计算
shindex = ( ( int32_t )32768 + ( int32_t )hAngle );
uhindex = ( uint16_t )shindex;
//uhindex /= ( uint16_t )64;
uhindex = uhindex >> 6;
/**
| hAngle | angle | std |
| (0,16384] | U0_90 | (0,0.5] |
| (16384,32767] | U90_180 | (0.5,0.99]|
| (-16384,-1] | U270_360 | (0,-0.5] |
| (-16384,-32768] | U180_270 | (-0.5,-1) |
*/
switch ( ( uint16_t )( uhindex ) & SIN_MASK )
{
case U0_90:
Local_Components.hSin =
hSin_Cos_Table[( uint8_t )( uhindex )];
Local_Components.hCos =
hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
break;
case U90_180:
Local_Components.hSin =
hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
Local_Components.hCos =
-hSin_Cos_Table[( uint8_t )( uhindex )];
break;
case U180_270:
Local_Components.hSin =
-hSin_Cos_Table[( uint8_t )( uhindex )];
Local_Components.hCos =
-hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
break;
case U270_360:
Local_Components.hSin =
-hSin_Cos_Table[( uint8_t )( 0xFFu - ( uint8_t )( uhindex ) )];
Local_Components.hCos =
hSin_Cos_Table[( uint8_t )( uhindex )];
break;
default:
break;
}
return ( Local_Components );
}
int main()
{
Trig_Components temp;
gpio_init();
while(1)
{
gpio_set;
temp = trig_functions(-5461);
gpio_reset;
}
}
查看计算时间
通过示波器的IO口的跳变时间来得到查表计算sin的时间