小蜜蜂代码风格的,模块都在,希望能够帮助你吧。
目录
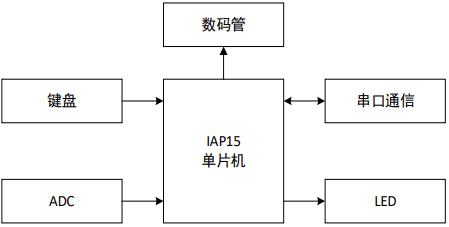
AT24C02存储芯片
void Write_AT24C02(unsigned char addr,unsigned char dat)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CSendByte(dat);
I2CWaitAck();
I2CStop();
}
void Read_AT24C02(unsigned char addr)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
tmp = I2CReceiveByte();
I2CSendAck(1);
I2CStop();
}DS18B20温度传感器
void Read_ds18b20_adc()
{
unsigned char LSB, MSB;
unsigned int tmep = 0;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
LSB = Read_DS18B20();
MSB = Read_DS18B20();
tmep = (LSB << 8) | MSB;
if ((temp & 0xf800) == 0x0000)
{
temp_ds18b2 = temp * 0.0625;
}
}
// 如果上电就是85 记得Delay一下DS1302 时钟
unsigned char code READ_RTC_ADDR[7] = {
0x81, 0x83, 0x85, 0x87, 0x89, 0x8b, 0x8d};
unsigned char code WRITE_RTC_ADDR[7] = {
0x80, 0x82, 0x84, 0x86, 0x88, 0x8a, 0x8c};
unsigned char TIME[7] = {
0x24, 0x58, 0x23, 0x19, 0x04, 0x06, 0x20};
void Init_ds1302()
{
unsigned char i;
Write_Ds1302_Byte(0x8E, 0x00);
for (i = 0; i < 3; i++)
{
Write_Ds1302_Byte(WRITE_RTC_ADDR[i], TIME[i]);
}
Write_Ds1302_Byte(0x8E, 0x80);
}
unsigned char hour, min, sec;
void Read_ds1302()
{
sec = Read_Ds1302_Byte(0x81);
min = Read_Ds1302_Byte(0x83);
hour = Read_Ds1302_Byte(0x85);
}
// 考点显示
void DisplaySMG_ds1302()
{
DisplaySMG_Bit(0, SMG_NoDot[hour >> 4]);
DisplaySMG_Bit(1, SMG_NoDot[hour & 0x0f]);
DisplaySMG_Bit(2, 0xbf);
DisplaySMG_Bit(3, SMG_NoDot[min >> 4]);
DisplaySMG_Bit(4, SMG_NoDot[min & 0x0f]);
DisplaySMG_Bit(5, 0xbf);
DisplaySMG_Bit(6, SMG_NoDot[sec >> 4]);
DisplaySMG_Bit(7, SMG_NoDot[sec & 0x0f]);
}NE555频率测量
// 方式1
void Init_timer()
{
TH0 = 0xff;
TL0 = 0xff; // 定时器 0 采用8位重装 0110
TH1 = (65536 - 50000) / 256;
TL1 = (65536 - 50000) % 256;
TMOD = 0x16;
ET0 = 1;
ET1 = 1;
EA = 1;
TR0 = 1;
TR1 = 1;
}
void Service_T0() interrupt 1
{
count_f++; // 每一次中断都加一
}
void Service_T1() interrupt 3
{
TH1 = (65536 - 50000) / 256;
TL1 = (65536 - 50000) % 256;
count_t++;
if (count_t == 20)
{
dat_f = count_f;
count_f = 0;
count_t = 0;
}
}
// 方式二
void Init_Timer0_Timer1()
{
TH1 = (65536 - 10000) / 256;
TL1 = (65536 - 10000) % 256;
TH0 = 0;
TL0 = 0;
TMOD = 0x15;
ET0 = 1;
ET1 = 1;
EA = 1;
TR0 = 1;
TR1 = 1;
}
void Service_Timer0() interrupt 3
{
TH1 = (65536 - 10000) / 256;
TL1 = (65536 - 10000) % 256;
count_t++;
if (count_t == 100)
{
count_t = 0;
freq = (TH0 << 8) | TL0;
TH0 = 0;
TL0 = 0;
}
}PCF8591 AD
void Write_DA(unsigned char dat)
{
I2CStart();
I2CSendByte(0x90);
I2CWaitAck();
I2CSendByte(0x41);
I2CWaitAck();
I2CSendByte(dat);
I2CWaitAck();
IIC_Stop();
}
unsigned char Read_AD()
{
unsigned char temp;
I2CStart();
I2CSendByte(0x90);
I2CWaitAck();
I2CSendByte(0x41);
I2CWaitAck();
I2CStart();
I2CSendByte(0x91);
I2CWaitAck();
temp = I2CReceiveByte();
I2CSendAck(1);
I2CStop();
return temp;
}
// 用的最多的就是0x41 0x43PWM波
// 10000 分成 100份
void Init_Timer0() interrupt 1
{
TH0 = (65536 - 100) / 256;
TL0 = (65536 - 100) % 256;
conut++;
if (count <= duty)
{
L1 = 0;
}
else if (count < 100)
{
L1 = 1;
}
else if (count == 100)
{
L1 = 0;
count = 0;
}
}
// 实现了呼吸灯超声波测距
// 最好用T1实现 因为T0用来实现NE555
sbit TX = P1 ^ 0;
sbit RX = P1 ^ 1;
void Delay_12us()
{
unsigned char i;
_nop_();
_nop_(); // 空操作
i = 33;
while (--i);
}
// STC 生成出来的 带上头文件
void Send_Wave()
{
unsigned char i;
for(i = 0;i < 8;i++)
{
TX = 1;
Delay_12us();
TX = 0;
Delay_12us();
}
}
void Measure_Distance()
{
unsigned int time = 0;
TMOD &= 0x0f;
TH1 = 0x00;
TH1 = 0x00;
Send_Wave();
TR1 = 1;
while((RX == 1)&&(TF1 ==0))
TR1 = 0;
if (TF1 == 0)
{
time = TH1;
time = (time << 8) | TL1;
distance = ((time / 10) * 17) / 100 + 3;
}
else
{
TF1 = 0;
distance = 999;
}
}串口UART
sfr AUXR = 0x8e;
void SendByte(unsigned char dat)
{
SBUF = dat;
while(TI == 0);
TI = 0;
}
void SendString(unsigned char *str)
{
while(*str != '\0')
{
SendByte(*str++);
}
}
void Init_Uart()
{
TMOD = 0x20;
TH1 = 0xfd;
TL1 = 0xfd;
TR1 = 1;
SCON = 0x50;
AUXR = 0x00;
ES = 1;
EA = 1;
}
unsigned char command = 0x00;
void Service_Uart() interrupt 4
{
if(RI == 1)
{
RI = 0;
command = SBUF;
}
}4X4矩阵按键
sbit R3 = P3^2;
sbit R4 = P3^3;
sbit C1 = P4^4;
sbit C2 = P4^2;
void Scan_Keys()
{
R3 = 0;
R4 = 1;
C1 = C2 = 1;
if(C1 == 0) //S5
{
DelaySMG(200);
if(C1 == 0)
{
if(F_smg == 21 || F_smg == 22 || F_smg == 23)
{
switch(F_smg)
{
case 21: F_smg = 22;break;
case 22: F_smg = 23;break;
case 23: F_smg = 21;break;
}
}
while(C1 == 0)
{
Display_Info();
}
}
}
else if(C2 == 0) //S9
{
DelaySMG(200);
if(C2 == 0)
{
if(F_smg == 3)
{
Param_temprature = Param_temprature - 1;
}
//
if(F_smg == 21 || F_smg == 22 || F_smg == 23)
{
F_time_begin = 1;
}
if(F_time_2s == 1)
{
hour = 0x00;
min = 0x00;
sec = 0x00;
F_smg = 1;
Max_temprature = 0;
Ave_temprature = 0;
Max_shidu = 0;
Ave_shidu = 0;
num = 0;
Param_temprature = 30;
F_time = 0;
F_time_2s = 0;
}
while(C2 == 0)
{
Display_Info();
}
F_time_begin = 0;
}
}
R3 = 1;
R4 = 0;
C1 = C2 = 1;
if(C1 == 0) //S4
{
DelaySMG(200);
if(C1 == 0)
{
switch(F_smg)
{
case 1: F_smg = 21;break;
case 21: F_smg = 3;break;
case 22: F_smg = 3;break;
case 23: F_smg = 3;break;
case 3: F_smg = 1;break;
}
while(C1 == 0)
{
Display_Info();
}
}
}
else if(C2 == 0) //S8
{
DelaySMG(200);
if(C2 == 0)
{
if(F_smg == 3)
{
Param_temprature = Param_temprature + 1;
}
while(C2 == 0)
{
Display_Info();
}
}
}
}、