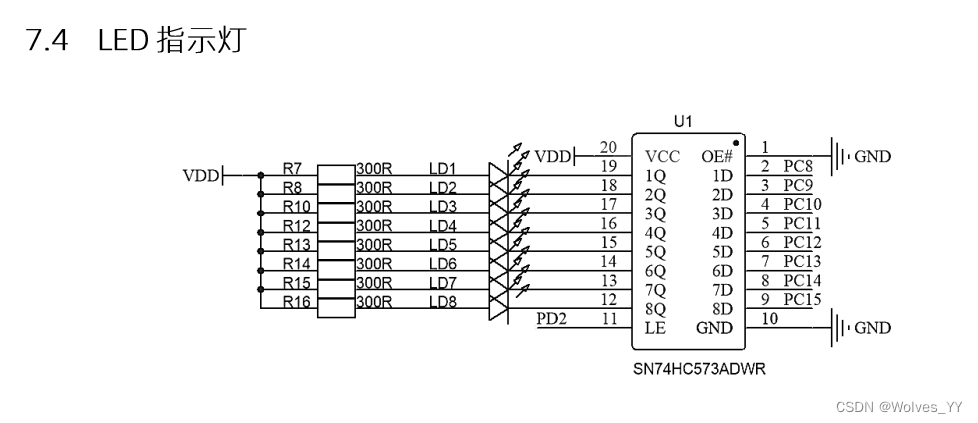
一、LED驱动
1.头文件
#ifndef __LED_H__
#define __LED_H__
#include "main.h"
void led_disp(u8 uled);
void Led_dispos(u8 pos);
void LED_Disp(u8 dsLED);
void TurnOn_LED(uint8_t _led);
void TurnOff_LED(uint8_t _led);
void Toogle_LED(uint8_t _led);
#endif /*__LED_H__*/
2.源文件
#include "led.h"
void led_disp(u8 uled)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12|
GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,uled<<8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
void Led_dispos(u8 pos)
{
switch(pos)
{
case 1:
led_disp(0x01);
break;
case 2:
led_disp(0x02);
break;
case 3:
led_disp(0x04);
break;
case 4:
led_disp(0x08);
break;
case 5:
led_disp(0x10);
break;
case 6:
led_disp(0x20);
break;
case 7:
led_disp(0x40);
break;
case 8:
led_disp(0x80);
break;
default:
led_disp(0x00);
}
}
u32 led = 0xff00;
/*
LED_Disp:全灭LED灯,然后点亮一个LED灯
dsLED:要点亮的LED灯,如dsLED==0x01,点亮LED1
*/
void LED_Disp(u8 dsLED)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,dsLED<<8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
/*
TurnOn_LED:点亮某个LED灯(使用寄存器)
参数:
@_led:要打开的LED灯序号(如第一个为“1”)
*/
void TurnOn_LED(uint8_t _led)
{
led &= ~(0x01<<(7+_led));
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
GPIOC->ODR = (uint32_t)led;
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
/*
TurnOff_LED:熄灭某个LED灯(使用寄存器)
参数:
@_led:要熄灭的LED灯序号(如第一个为“1”)
*/
void TurnOff_LED(uint8_t _led)
{
led |= (0x01<<(7+_led));
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
GPIOC->ODR = (uint32_t)led;
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
/*
Toogle_LED:反转某个LED灯(使用寄存器)
参数:
@_led:要反转的LED灯序号(如第一个为“1”)
*/
void Toogle_LED(uint8_t _led)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_TogglePin(GPIOC, _led << 8);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
/*
LED_mie:LED全灭
*/
void LED_mie(void)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
/*
LED_linag:LED全亮
*/
void LED_liang(void)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
二、key驱动
1.头文件
#ifndef __KEY_H__
#define __KEY_H__
#include "main.h "
#include "stdbool.h"
struct keys
{
unsigned char judge_sta; //按键状态 0 1 2
bool key_sta; //1->未按下 0->按下
bool single_flag;
unsigned int key_time;
bool long_flag;
};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);
#endif /* __KEY_H__*/
二、源文件
#include "key.h"
#include "lcd.h"
#include "tim.h"
struct keys key[4]={0,0,0,0,0};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3)
{
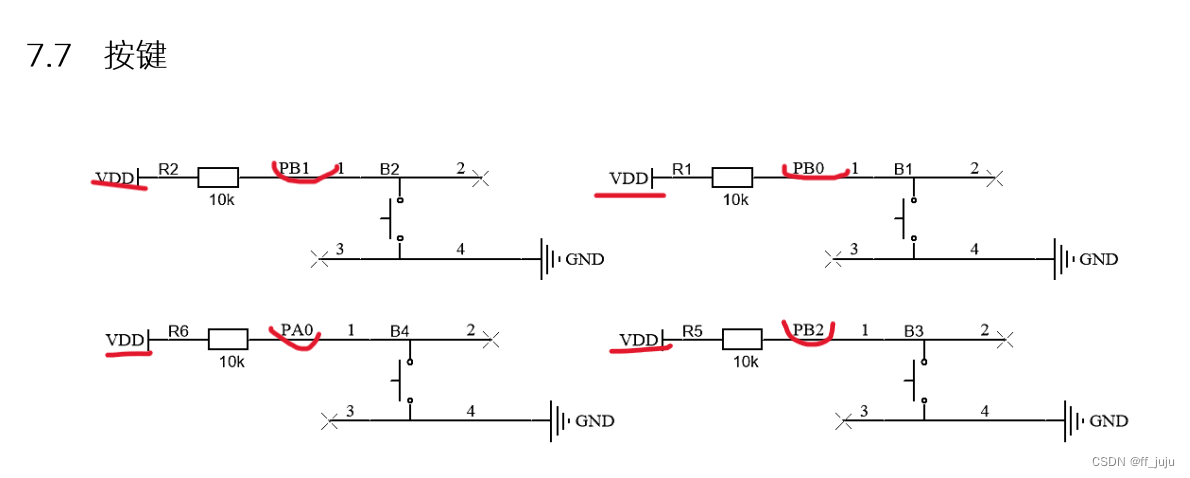
key[0].key_sta = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0);
key[1].key_sta = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1);
key[2].key_sta = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2);
key[3].key_sta = HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0);
for(unsigned char i = 0; i < 4; i++)
{
switch(key[i].judge_sta)
{
case 0:
{
if(key[i].key_sta == 0) //按下为0
{
key[i].judge_sta = 1; //状态为1
}
}
break;
case 1:
{
if(key[i].key_sta == 0) //再次确认按下为0
{
key[i].judge_sta = 2; //第二次确认按键按下
}
else
{
key[i].judge_sta = 0; //没按下的状态为0
}
}
break;
case 2:
{
if(key[i].key_sta == 1)// 按键松开后进入case0
{
key[i].judge_sta = 0; //恢复状态0
if(key[i].key_time < 100)
{
key[i].single_flag = 1; //表示单击
}
if(key[i].key_time > 100)
{
key[i].long_flag = 1;
key[i].key_time =0;
}
}
else
{
key[i].key_time++;
}
}
break;
}
}
}
}
三、IIC驱动
1.头文件
#ifndef __I2C_HAL_H
#define __I2C_HAL_H
#include "stm32g4xx_hal.h"
#include "main.h"
void I2CStart(void);
void I2CStop(void);
unsigned char I2CWaitAck(void);
void I2CSendAck(void);
void I2CSendNotAck(void);
void I2CSendByte(unsigned char cSendByte);
unsigned char I2CReceiveByte(void);
void I2CInit(void);
void eeprom_write(u8 add,u8 dat);
u8 eeprom_read(u8 add);
#endif
2.源文件
/*
����˵��: CT117E-M4Ƕ��ʽ������GPIOģ��I2C������������
��������: MDK-ARM HAL��
Ӳ������: CT117E-M4Ƕ��ʽ������
�� ��: 2020-3-1
*/
#include "i2c_hal.h"
#define DELAY_TIME 20
/**
* @brief SDA������ģʽ����
* @param None
* @retval None
*/
void SDA_Input_Mode()
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
GPIO_InitStructure.Pin = GPIO_PIN_7;
GPIO_InitStructure.Mode = GPIO_MODE_INPUT;
GPIO_InitStructure.Pull = GPIO_PULLUP;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}
/**
* @brief SDA�����ģʽ����
* @param None
* @retval None
*/
void SDA_Output_Mode()
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
GPIO_InitStructure.Pin = GPIO_PIN_7;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStructure.Pull = GPIO_NOPULL;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}
/**
* @brief SDA�����һ��λ
* @param val ���������
* @retval None
*/
void SDA_Output( uint16_t val )
{
if ( val )
{
GPIOB->BSRR |= GPIO_PIN_7;
}
else
{
GPIOB->BRR |= GPIO_PIN_7;
}
}
/**
* @brief SCL�����һ��λ
* @param val ���������
* @retval None
*/
void SCL_Output( uint16_t val )
{
if ( val )
{
GPIOB->BSRR |= GPIO_PIN_6;
}
else
{
GPIOB->BRR |= GPIO_PIN_6;
}
}
/**
* @brief SDA����һλ
* @param None
* @retval GPIO����һλ
*/
uint8_t SDA_Input(void)
{
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET){
return 1;
}else{
return 0;
}
}
/**
* @brief I2C�Ķ�����ʱ
* @param None
* @retval None
*/
static void delay1(unsigned int n)
{
uint32_t i;
for ( i = 0; i < n; ++i);
}
/**
* @brief I2C��ʼ�ź�
* @param None
* @retval None
*/
void I2CStart(void)
{
SDA_Output(1);
delay1(DELAY_TIME);
SCL_Output(1);
delay1(DELAY_TIME);
SDA_Output(0);
delay1(DELAY_TIME);
SCL_Output(0);
delay1(DELAY_TIME);
}
/**
* @brief I2C�����ź�
* @param None
* @retval None
*/
void I2CStop(void)
{
SCL_Output(0);
delay1(DELAY_TIME);
SDA_Output(0);
delay1(DELAY_TIME);
SCL_Output(1);
delay1(DELAY_TIME);
SDA_Output(1);
delay1(DELAY_TIME);
}
/**
* @brief I2C�ȴ�ȷ���ź�
* @param None
* @retval None
*/
unsigned char I2CWaitAck(void)
{
unsigned short cErrTime = 5;
SDA_Input_Mode();
delay1(DELAY_TIME);
SCL_Output(1);
delay1(DELAY_TIME);
while(SDA_Input())
{
cErrTime--;
delay1(DELAY_TIME);
if (0 == cErrTime)
{
SDA_Output_Mode();
I2CStop();
return ERROR;
}
}
SCL_Output(0);
SDA_Output_Mode();
delay1(DELAY_TIME);
return SUCCESS;
}
/**
* @brief I2C����ȷ���ź�
* @param None
* @retval None
*/
void I2CSendAck(void)
{
SDA_Output(0);
delay1(DELAY_TIME);
delay1(DELAY_TIME);
SCL_Output(1);
delay1(DELAY_TIME);
SCL_Output(0);
delay1(DELAY_TIME);
}
/**
* @brief I2C���ͷ�ȷ���ź�
* @param None
* @retval None
*/
void I2CSendNotAck(void)
{
SDA_Output(1);
delay1(DELAY_TIME);
delay1(DELAY_TIME);
SCL_Output(1);
delay1(DELAY_TIME);
SCL_Output(0);
delay1(DELAY_TIME);
}
/**
* @brief I2C����һ���ֽ�
* @param cSendByte ��Ҫ���͵��ֽ�
* @retval None
*/
void I2CSendByte(unsigned char cSendByte)
{
unsigned char i = 8;
while (i--)
{
SCL_Output(0);
delay1(DELAY_TIME);
SDA_Output(cSendByte & 0x80);
delay1(DELAY_TIME);
cSendByte += cSendByte;
delay1(DELAY_TIME);
SCL_Output(1);
delay1(DELAY_TIME);
}
SCL_Output(0);
delay1(DELAY_TIME);
}
/**
* @brief I2C����һ���ֽ�
* @param None
* @retval ���յ����ֽ�
*/
unsigned char I2CReceiveByte(void)
{
unsigned char i = 8;
unsigned char cR_Byte = 0;
SDA_Input_Mode();
while (i--)
{
cR_Byte += cR_Byte;
SCL_Output(0);
delay1(DELAY_TIME);
delay1(DELAY_TIME);
SCL_Output(1);
delay1(DELAY_TIME);
cR_Byte |= SDA_Input();
}
SCL_Output(0);
delay1(DELAY_TIME);
SDA_Output_Mode();
return cR_Byte;
}
//
void I2CInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
GPIO_InitStructure.Pin = GPIO_PIN_7 | GPIO_PIN_6;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStructure.Pull = GPIO_PULLUP;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}
u8 eeprom_read(u8 addr)
{
u8 data;
I2CStart();
I2CSendByte(0xA0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
data =I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return data;
}
void eeprom_write(u8 addr,u8 data)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CSendByte(data);
I2CWaitAck();
I2CStop();
}