目录
1.程序功能描述
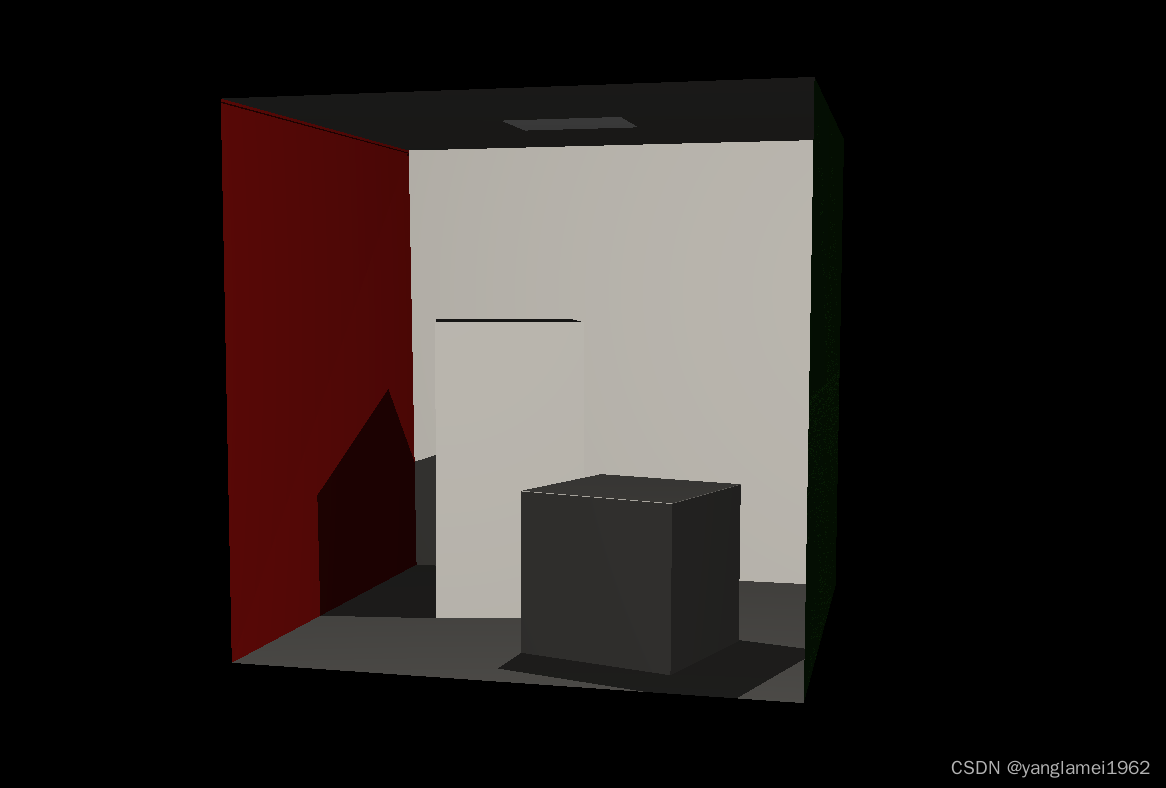
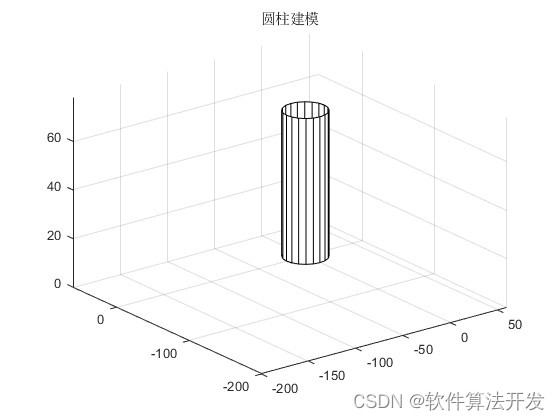
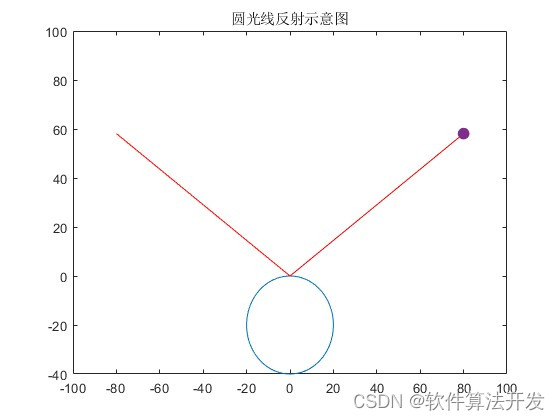
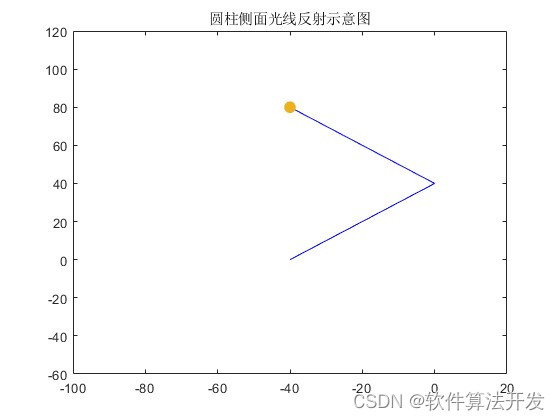
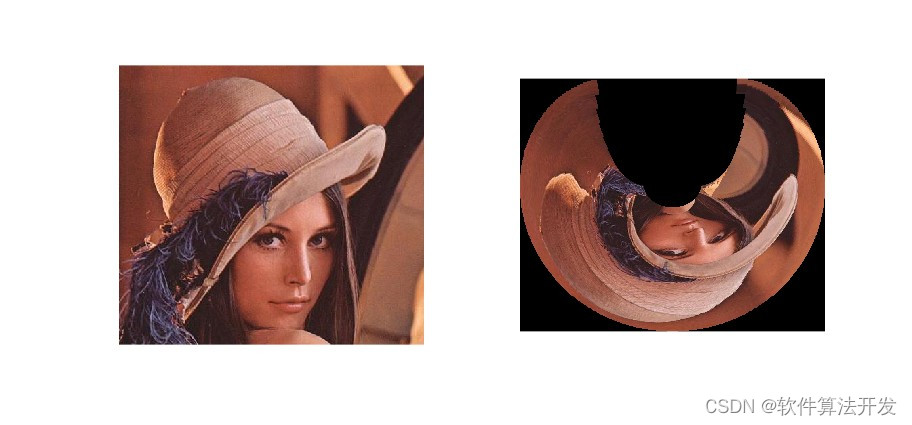
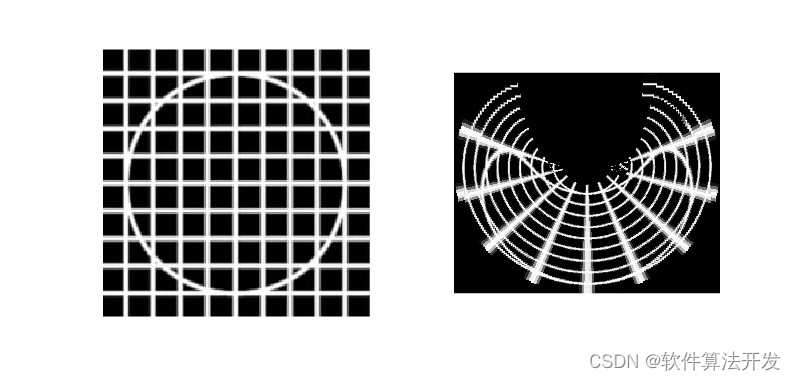
基于圆柱体镜子和光线跟踪实现镜反射观测全景观图.模拟的场景如下所示:

2.测试软件版本以及运行结果展示
MATLAB2022a版本运行

3.核心程序
...............................................................................
%% step1
for i = 1:mm
x_new(i) = i-round(mm/2);
end
for i = 1:nn
y_new(i) = i-round(nn/2);
end
for i=1:mm
for j=1:nn
[x1s(i,j),y1s(i,j)]=func_x1y1(x_new(i),y_new(j),alf,h,d,mm,nn);
end
end
X_maxer = abs(min(min(x1s)))+1;
Y_maxer = abs(min(min(y1s)))+1;
x1 = x1s + X_maxer;
y1 = y1s + Y_maxer;
for i=1:mm-1
for j=1:nn-1
image1(x1(i,j):x1(i,j+1),y1(i,j):y1(i,j+1) ,1) = img0(i,j,1);
image1(x1(i,j):x1(i,j+1),y1(i,j):y1(i,j+1) ,2) = img0(i,j,2);
image1(x1(i,j):x1(i,j+1),y1(i,j):y1(i,j+1) ,3) = img0(i,j,3);
image2(x1(i,j):x1(i+1,j),y1(i,j):y1(i+1,j) ,1) = img0(i,j,1);
image2(x1(i,j):x1(i+1,j),y1(i,j):y1(i+1,j) ,2) = img0(i,j,2);
image2(x1(i,j):x1(i+1,j),y1(i,j):y1(i+1,j) ,3) = img0(i,j,3);
image3(x1(i,j):x1(i+1,j+1),y1(i,j):y1(i+1,j+1),1) = img0(i,j,1);
image3(x1(i,j):x1(i+1,j+1),y1(i,j):y1(i+1,j+1),2) = img0(i,j,2);
image3(x1(i,j):x1(i+1,j+1),y1(i,j):y1(i+1,j+1),3) = img0(i,j,3);
end
end
%% step2
x1s2 = x1s/abs(max(max(x1s)));
y1s2 = y1s/abs(max(max(y1s)));
for i=1:mm
for j=1:nn
[x2(i,j),y2(i,j)] = func_x2y2(x1s2(i,j),y1s2(i,j),d);
end
end
x2 = round(x2*500);
y2 = round(y2*500);
X_max = abs(min(min(x2)))+1;
Y_max = abs(min(min(y2)))+1;
for i=1:mm
for j=1:nn
y3(i,j) = y2(i,j) + Y_max;
x3(i,j) = x2(i,j) + X_max;
end
end
%图像的合并
images01 = func_view(img0,mm,nn,x3,y3);
subplot(122)
imshow(images01);
24_001m4.本算法原理
基于圆柱体镜子和光线跟踪技术实现镜反射观测全景观图,涉及几何光学、计算机图形学以及数值计算等多个领域的知识。该方法利用圆柱镜面的反射特性,通过模拟光线在场景与镜子之间的交互,构建出一种独特的全景视角。
圆柱体镜子:圆柱镜是一种具有特定曲率半径的圆柱形反射表面。其反射特性遵循镜面反射定律,即入射光线、反射光线与法线(垂直于镜面的直线)均位于同一平面内,且入射角等于反射角。
光线跟踪:光线跟踪是一种计算机图形学中的渲染技术,它模拟光在虚拟场景中的传播路径,通过追踪从观察者出发(或反向从光源出发)的光线,计算其与场景物体的交点及对应的光照信息,以合成逼真的图像。
全景图:全景图是一种能够展现360°视野范围内场景信息的图像。在圆柱镜反射观测全景观图中,通过合理布置光源和圆柱镜,使得场景中的所有可见部分都能被反射到镜面上,再通过光线跟踪合成出全景视图。
光线与圆柱镜面的交点计算:
给定一条光线 L(t)=O+tD,其中 O 是光线起点,D 是单位方向向量,t 是沿光线的参数。要确定光线与圆柱镜面x2+y2=r2 的交点,需解下列方程组:

反射光线计算:
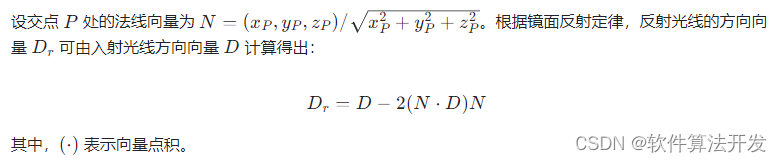
全景图坐标转换:
将反射光线交点处的场景颜色信息映射到圆柱镜面的全景图上,需要进行坐标转换。假设全景图的坐标为u,v),则:
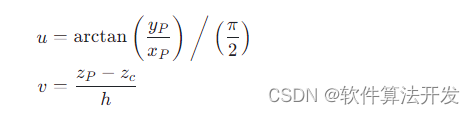
其中,h 是圆柱镜的高度。将 (u,v) 映射到全景图对应像素位置,并存储该位置的颜色值。
5.完整程序
VVV