自动驾驶|交通标志识别:各目标检测算法评测
论文题目:Evaluation of Deep Neural Networks for traffic sign detection systems
开源代码:https://github.com/aarcosg/traffic-sign-detection

附赠自动驾驶学习资料和量产经验:链接
1. 概述
本篇文章的工作用一句话就可以总结,就是比较各目标检测算法在交通标志检测和识别任务中的综合性能。一共比较了8种模型,用5项指标进行评价,到这里,我只想说,这位老哥你是真的闲。
2. 评价内容及方法
1)评价模型
一共评价了8种模型,如下表所示

所有打勾的就是参与评价的模型,也就是对比各个检测框架或同一检测框架下不同特征提取网络之间的差异。
2)评价指标
评价指标一共有5种,分别是mAP(精度)、FPS(速度)、memory(内存占用)、FLOPs(浮点运算次数)、parameters(参数量)
3)评价流程
使用各模型在coco数据集上训练的参数,fine-tune方法迁移到German Traffic Sign Detection Benchmark dataset(GTSDB)训练集上调整参数,之后在GTSDB的测试集上运行,并对结果进行评价。
3. 评价结果
各模型5项指标的结果如下表所示

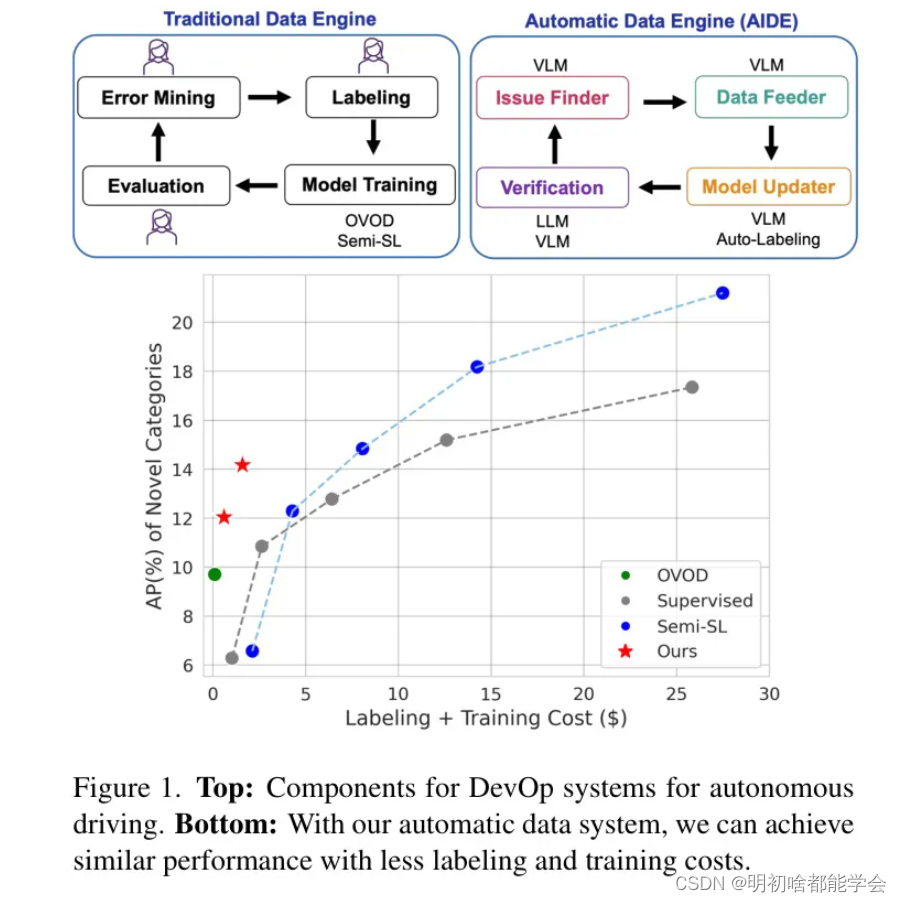
为了对比更直观,作者给出了下面这张图

最后描述一下结论:
Faster R-CNN与Inception Resnet V2的组合达到最高的mAP(95.77%),R-FCN与Resnet 101组合达到精度(95.15%)和速度(85.45ms每幅图像)的最佳平衡,YOLO V2取得了有竞争力的精度(78.83%)并且是第二快的(21.48ms每幅图像),SSD MobileNet则是最快的模型(15.14ms每幅图像),也是对内存要求最低的(94.70MB)。SSD MobileNet最适合在移动端和嵌入式设备部署,但对小的交通标识检测结果不好。
4. 总结与感想
我不感想,我仍然觉得他很闲。






















![BUUCTF:BUU UPLOAD COURSE 1[WriteUP]](https://img-blog.csdnimg.cn/direct/2c7d380ac2e54411bfeb87b32d215d51.png)