背景
OpenCV 介绍
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉和机器学习软件库。它由一系列的 C 函数和少量 C++ 类构成,同时提供 Python、Java 和 MATLAB 等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。
OpenCV 具有极广的应用领域,它包括但不限于:
- 人脸识别和物体识别:这是 OpenCV 的一项重要功能,应用在许多领域,如安全监控、交互设计等。
- 图像和视频分析:如图像增强、图像分割、视频跟踪等。
- 图像合成和 3D 重建:在图像处理和计算机视觉领域,OpenCV 可以用于创建 AR 或 VR 效果,生成 3D 模型等。
- 机器学习:OpenCV 内置了大量的机器学习算法,可以用于图像分类、聚类等任务。
- 深度学习:OpenCV 中的 dnn 模块提供了一系列深度学习模型的接口,用户可以加载预训练模型进行图像识别、目标检测等任务。
本文主要介绍 OpenHarmony 如何用 opencvlib 进行应用样例开发
应用开发
创建 HAP
- 通过 DevEcoStudio 创建项目“File->New->Create Project"创建一个工程
工程创建完毕后,界面入口为 Index.ets

引用 OpenCV lib 库
引入 opencv 头文件库,放在 include 目录下
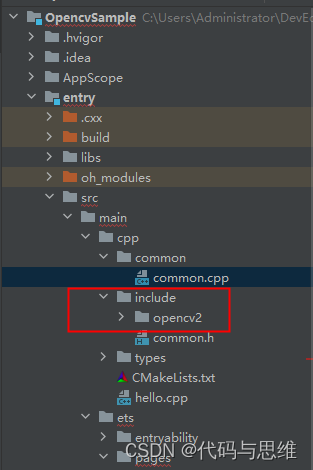
引入 lib 库,放在 libs 目录下

修改 CMAKE

增加 common 头文件和 cpp 文件
//
// Created on 2024/3/5.
//
// Node APIs are not fully supported. To solve the compilation error of the interface cannot be found,
// please include "napi/native_api.h".
#ifndef OpencvSample_common_H
#define OpencvSample_common_H
#include <string>
#include <stdio.h>
#include <js_native_api.h>
#include <js_native_api_types.h>
#include <vector>
#include "opencv2/opencv.hpp"
#include "opencv2/imgcodecs/legacy/constants_c.h"
#include "hilog/log.h"
#include "napi/native_api.h"
#include "rawfile/raw_file_manager.h"
#include "rawfile/raw_file.h"
#include "rawfile/raw_dir.h"
#define GLOBAL_RESMGR (0xFFEE)
constexpr int32_t RGB_565 = 2;
constexpr int32_t RGBA_8888 = 3;
constexpr int32_t STR_MAX_SIZE = 200;
constexpr int32_t LONG_STR_MAX_SIZE = 1024;
constexpr int32_t ERR_OK = 0;
constexpr int8_t NO_ERROR = 0;
constexpr int8_t ERROR = -1;
constexpr uint8_t PARAM0 = 0;
constexpr uint8_t PARAM1 = 1;
constexpr uint8_t PARAM2 = 2;
constexpr uint8_t PARAM3 = 3;
constexpr uint8_t PARAM4 = 4;
constexpr uint8_t PARAM5 = 5;
constexpr uint8_t PARAM6 = 6;
constexpr uint8_t PARAM7 = 7;
constexpr uint8_t PARAM8 = 8;
constexpr uint8_t PARAM9 = 9;
constexpr uint8_t PARAM10 = 10;
constexpr uint8_t PARAM11 = 11;
constexpr uint8_t PARAM12 = 12;
constexpr int32_t ARGS_ONE = 1;
constexpr int32_t ARGS_TWO = 2;
constexpr int32_t ONLY_CALLBACK_MAX_PARA = 1;
constexpr int32_t ONLY_CALLBACK_MIN_PARA = 0;
struct CallbackPromiseInfo {
napi_ref callback = nullptr;
napi_deferred deferred = nullptr;
bool isCallback = false;
int32_t errorCode = 0;
};
template <typename T> void FreeMemory(T *p) {
if (p == nullptr) {
return;
}
delete p;
p = nullptr;
}
template <typename T> void FreeMemoryArray(T *p) {
if (p == nullptr) {
return;
}
delete[] p;
p = nullptr;
}
#define NAPI_RETVAL_NOTHING
#define NAPI_CALL_BASE(env, theCall, retVal) \
do { \
if ((theCall) != 0) { \
return retVal; \
} \
} while (0)
#define NAPI_CALL(env, theCall) NAPI_CALL_BASE(env, theCall, nullptr)
#define NAPI_CALL_RETURN_VOID(env, theCall) NAPI_CALL_BASE(env, theCall, NAPI_RETVAL_NOTHING)
extern bool GetMatFromRawFile(napi_env env, napi_value jsResMgr, const std::string &rawfileDir,
const std::string &fileName, cv::Mat &srcImage);
extern bool cvtMat2Pixel(cv::InputArray _src, cv::OutputArray &_dst, int code);
extern napi_value NapiGetNull(napi_env env);
extern uint32_t GetMatDataBuffSize(const cv::Mat &mat);
extern bool CreateArrayBuffer(napi_env env, uint8_t *src, size_t srcLen, napi_value *res);
extern napi_value NapiGetUndefined(napi_env env);
extern napi_value GetCallbackErrorValue(napi_env env, int32_t errCode);
extern napi_value NapiGetBoolean(napi_env env, const bool &isValue);
extern uint32_t GetMatDataBuffSize(const cv::Mat &mat);
extern void SetCallback(const napi_env &env, const napi_ref &callbackIn, const int32_t &errorCode,
const napi_value &result);
extern void SetPromise(const napi_env &env, const napi_deferred &deferred, const int32_t &errorCode,
const napi_value &result);
extern void ReturnCallbackPromise(const napi_env &env, const CallbackPromiseInfo &info, const napi_value &result);
extern napi_value JSParaError(const napi_env &env, const napi_ref &callback);
extern void PaddingCallbackPromiseInfo(const napi_env &env, const napi_ref &callback, CallbackPromiseInfo &info,
napi_value &promise);
extern bool WrapJsPixelInfoInfo(napi_env env, cv::Mat &outMat, napi_value &result);
#endif //OpencvSample_common_H
增加灰度转换方法
using namespace std;
using namespace cv;
static const char *TAG = "[opencv_img2Gray]";
napi_value Img2Gray(napi_env env, napi_callback_info info) {
OH_LOG_Print(LOG_APP, LOG_INFO, GLOBAL_RESMGR, TAG, "Img2Gray Begin");
napi_value result = NapiGetNull(env);
size_t argc = 3;
napi_value argv[3] = {nullptr};
napi_get_cb_info(env, info, &argc, argv, nullptr, nullptr);
size_t strSize;
char strBuf[256];
napi_get_value_string_utf8(env, argv[1], strBuf, sizeof(strBuf), &strSize);
std::string fileDir(strBuf, strSize);
OH_LOG_Print(LOG_APP, LOG_INFO, GLOBAL_RESMGR, TAG, "fileDir:%{public}s", fileDir.c_str());
napi_get_value_string_utf8(env, argv[2], strBuf, sizeof(strBuf), &strSize);
std::string fileName(strBuf, strSize);
OH_LOG_Print(LOG_APP, LOG_INFO, GLOBAL_RESMGR, TAG, "fileName:%{public}s", fileName.c_str());
Mat srcImage;
if (!GetMatFromRawFile(env, argv[0], fileDir, fileName, srcImage)) {
OH_LOG_Print(LOG_APP, LOG_ERROR, GLOBAL_RESMGR, TAG, "Get Mat from rawfile failed!.");
return result;
}
Mat srcGray;
cvtColor(srcImage, srcGray, COLOR_RGB2GRAY);
// 將图像转换为pixelMap格式
Mat outMat;
cvtMat2Pixel(srcGray, outMat, RGBA_8888);
OH_LOG_Print(LOG_APP, LOG_INFO, GLOBAL_RESMGR, TAG, "outMat size: %{public}d, cols:%{public}d, rows:%{public}d",
outMat.total(), outMat.cols, outMat.rows);
napi_create_object(env, &result);
bool retVal = WrapJsPixelInfoInfo(env, outMat, result);
if (!retVal) {
OH_LOG_Print(LOG_APP, LOG_ERROR, GLOBAL_RESMGR, TAG, "WrapJsInfo failed!.");
}
return result;
}导出 //hello.cpp
EXTERN_C_START
static napi_value Init(napi_env env, napi_value exports)
{
napi_property_descriptor desc[] = {
{"add", nullptr, Add, nullptr, nullptr, nullptr, napi_default, nullptr},
{"img2Gray", nullptr, Img2Gray, nullptr, nullptr, nullptr, napi_default, nullptr}
};
napi_define_properties(env, exports, sizeof(desc) / sizeof(desc[0]), desc);
return exports;
}
EXTERN_C_END- 导出接口 //index.d.ts
import resourceManager from '@ohos.resourceManager';
export interface PixelInfo {
rows: number;
cols: number;
buffSize: number;
byteBuffer: ArrayBuffer;
}
export const add: (a: number, b: number) => number;
export const img2Gray: (resmgr: resourceManager.ResourceManager, path: string, file: string) => PixelInfo;- 在页面添加交互 // index.ets
Column() {
Image(this.isGray ? this.imagePixelMap : $rawfile('lena.jpg'))
.margin({ left: 24, right: 24 })
.objectFit(ImageFit.Contain)
.id('backBtn')
}
.width('100%')
.height('60%')
.alignItems(HorizontalAlign.Center)
.justifyContent(FlexAlign.Start)
Row() {
Button($r('app.string.image_gray'), { type: ButtonType.Capsule })
.backgroundColor(this.isGray ? Color.Gray : Color.Blue)
.margin({ left: 24 })
.width('30%')
.id('imageGray')
.enabled(this.isGray ? false : true)
.onClick(() => {
let pixelInfo: testNapi.PixelInfo = testNapi.img2Gray(getContext().resourceManager, '', 'lena.jpg');
Logger.info(TAG, `pixelInfo buffSize: ${pixelInfo.buffSize}`);
let opts: image.InitializationOptions = {
editable: true,
pixelFormat: this.pixelMapFormat,
size: { height: pixelInfo.rows, width: pixelInfo.cols }
}
image.createPixelMap(pixelInfo.byteBuffer, opts, (error, pixelmap) => {
if (error) {
Logger.error(TAG, `Failed to create pixelmap error_code ${error.code}`);
} else {
Logger.info(TAG, 'Succeeded in creating pixelmap.');
this.imagePixelMap = pixelmap;
}
})
this.isGray = true;
})
Button($r('app.string.image_recover'), { type: ButtonType.Capsule })
.backgroundColor(Color.Blue)
.width('30%')
.id('imageRecover')
.onClick(() => {
this.isGray = false;
})
}
.width('100%')展示
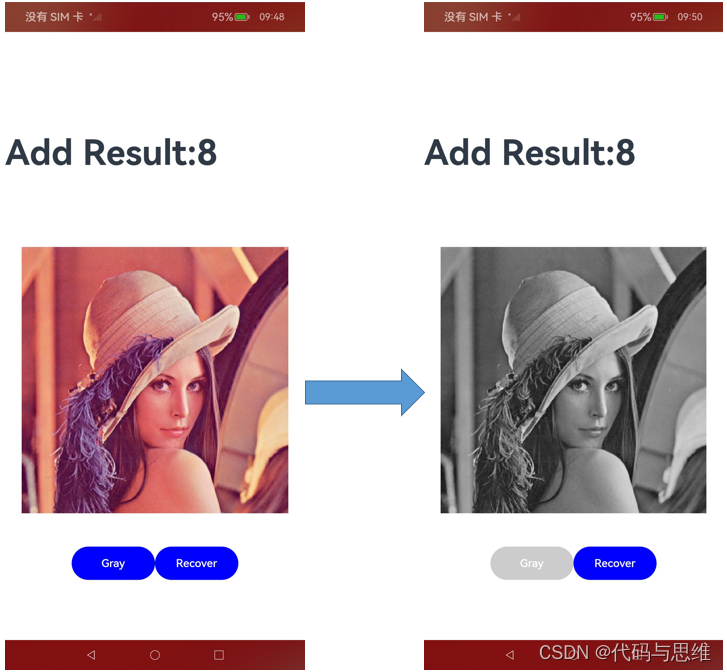
总结
可以用 nativec++ 方式导入 opencv 库直接开发应用,目前实现了一个简单接口,后面会实现场景应用
目前只能做到可用,还有以下问题:
- 需要 NAPI 接口进行 ArkTS 和 C/C++ 交互
- 速度比较慢,是否可以通过 GPU 加速
- Arkts 和 native 交互多,考虑转用 xcomponent 方式
最后
有很多小伙伴不知道学习哪些鸿蒙开发技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?而且学习时频繁踩坑,最终浪费大量时间。所以有一份实用的鸿蒙(HarmonyOS NEXT)资料用来跟着学习是非常有必要的。
这份鸿蒙(HarmonyOS NEXT)资料包含了鸿蒙开发必掌握的核心知识要点,内容包含了(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、音频、视频、WebGL、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、Harmony南向开发、鸿蒙项目实战等等)鸿蒙(HarmonyOS NEXT)技术知识点。
希望这一份鸿蒙学习资料能够给大家带来帮助,有需要的小伙伴自行领取,限时开源,先到先得~无套路领取!!
获取这份完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
鸿蒙(HarmonyOS NEXT)最新学习路线
HarmonOS基础技能
- HarmonOS就业必备技能
- HarmonOS多媒体技术
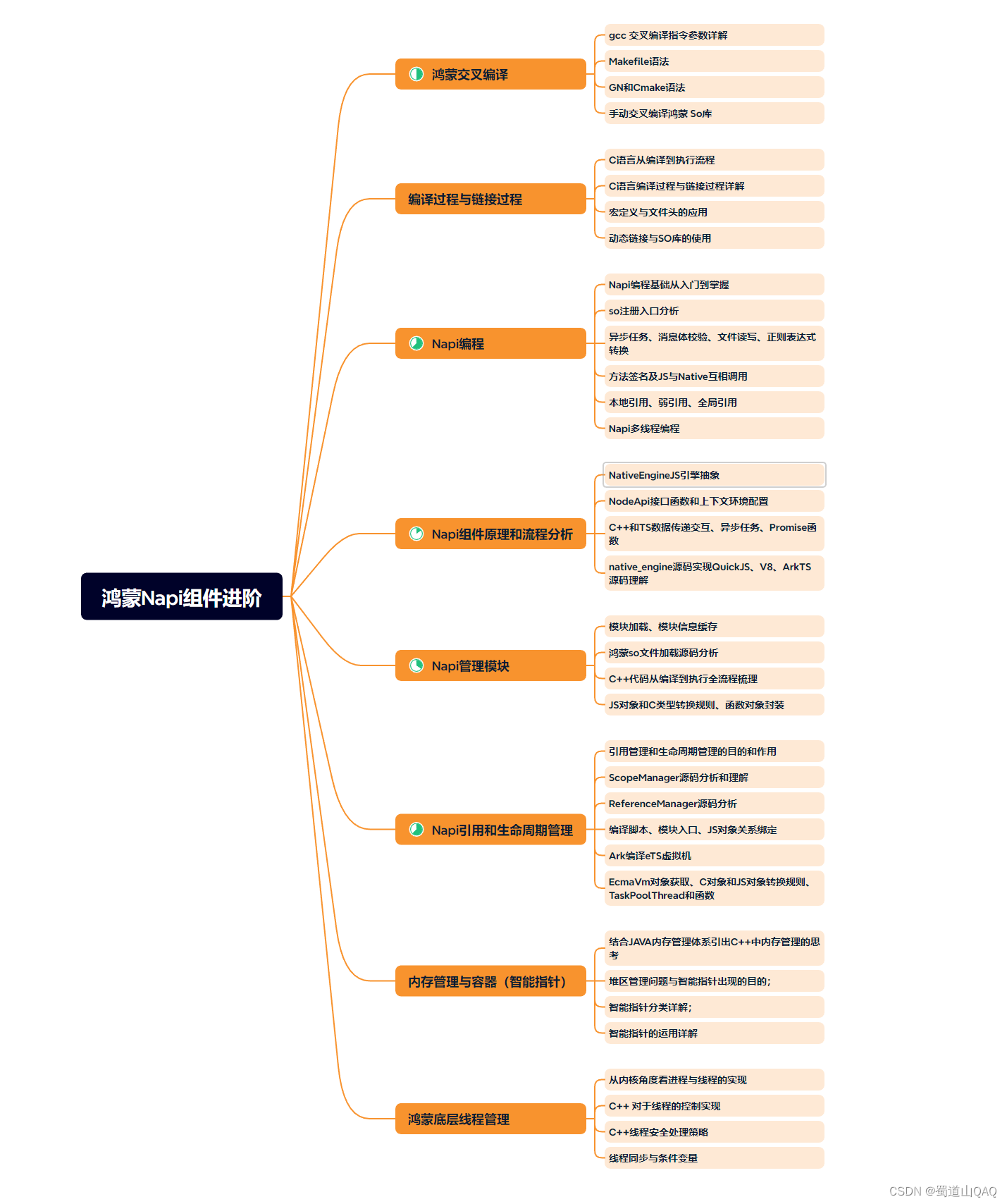
- 鸿蒙NaPi组件进阶
- HarmonOS高级技能

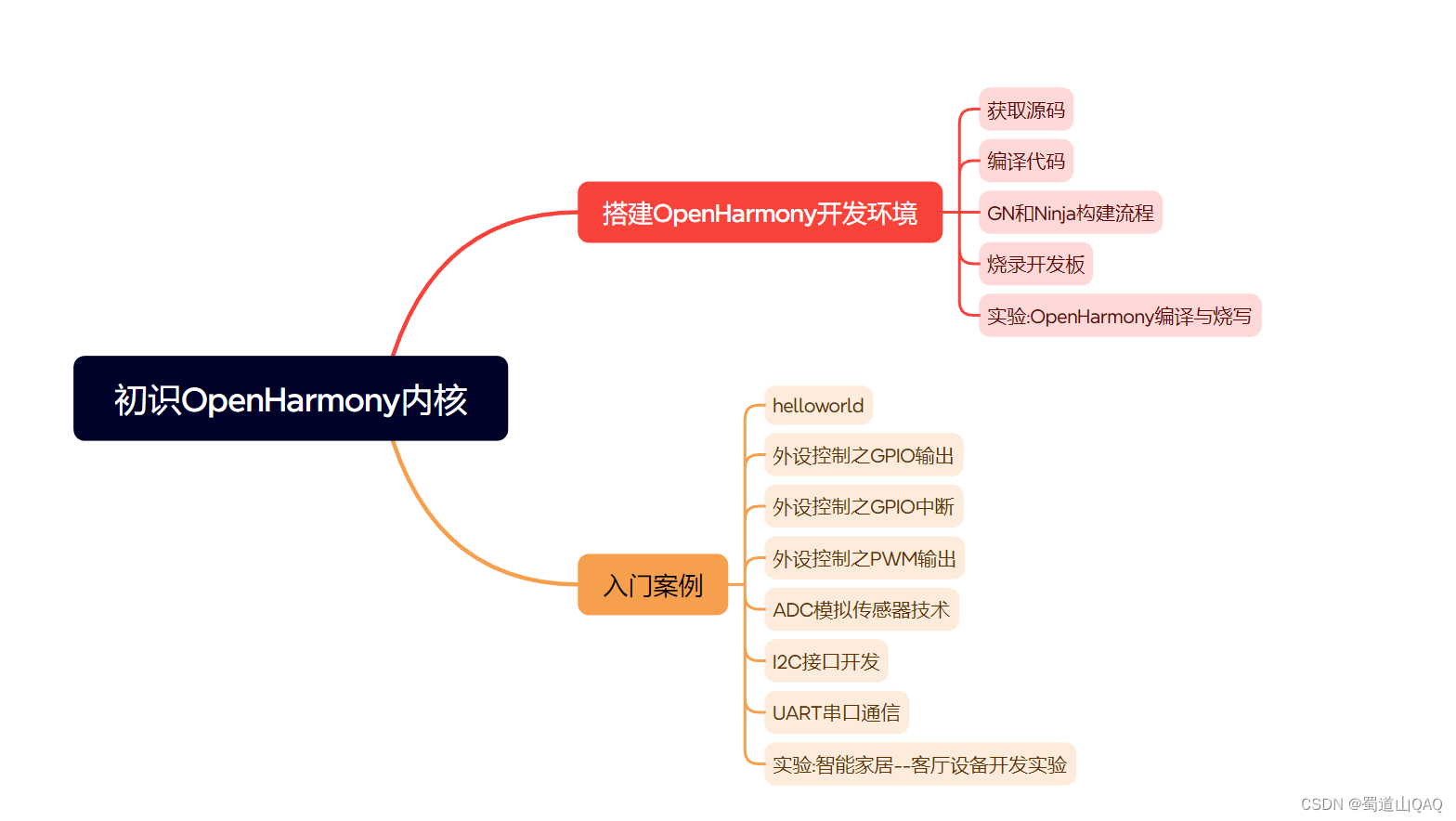
- 初识HarmonOS内核
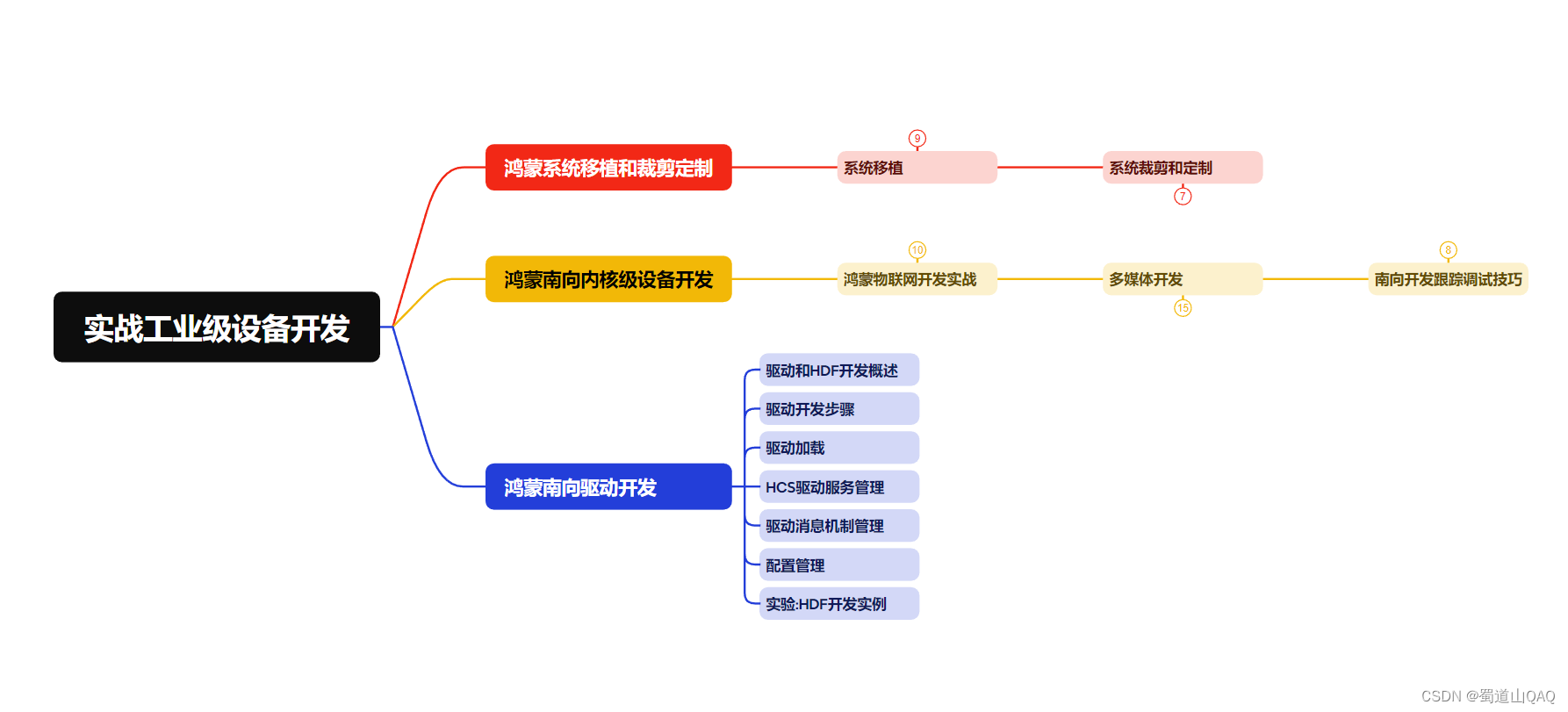
- 实战就业级设备开发
有了路线图,怎么能没有学习资料呢,小编也准备了一份联合鸿蒙官方发布笔记整理收纳的一套系统性的鸿蒙(OpenHarmony )学习手册(共计1236页)与鸿蒙(OpenHarmony )开发入门教学视频,内容包含:ArkTS、ArkUI、Web开发、应用模型、资源分类…等知识点。
获取以上完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
《鸿蒙 (OpenHarmony)开发入门教学视频》
《鸿蒙生态应用开发V2.0白皮书》
《鸿蒙 (OpenHarmony)开发基础到实战手册》
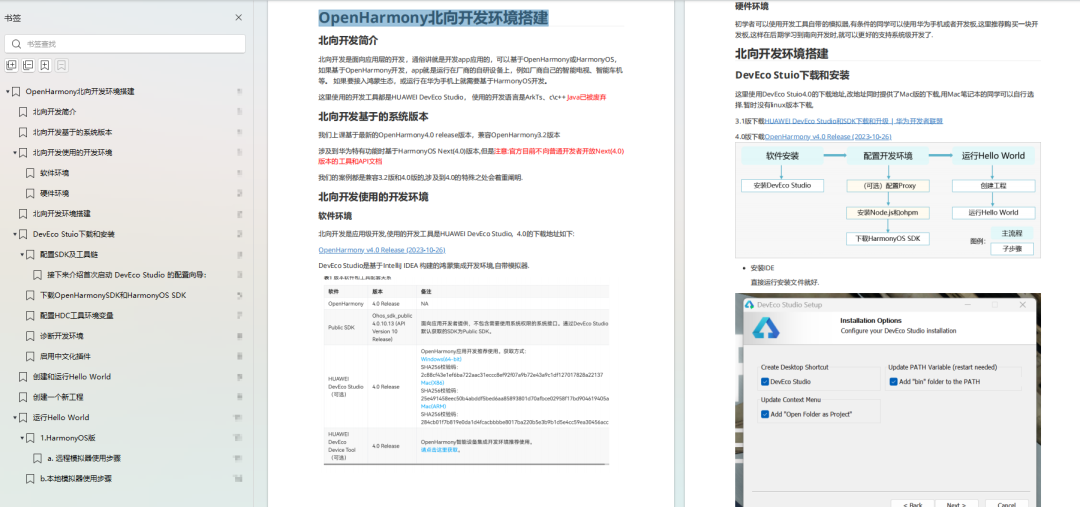
OpenHarmony北向、南向开发环境搭建
《鸿蒙开发基础》
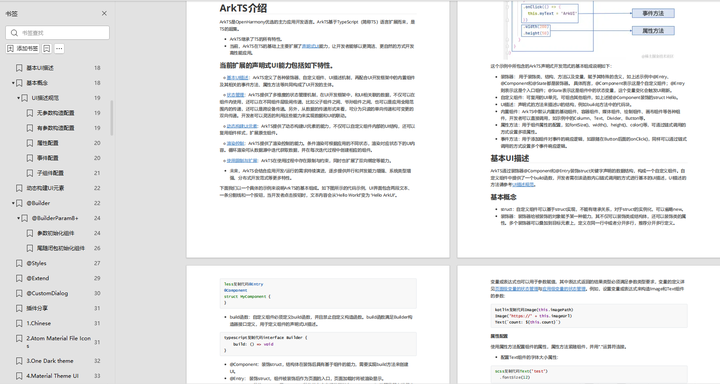
- ArkTS语言
- 安装DevEco Studio
- 运用你的第一个ArkTS应用
- ArkUI声明式UI开发
- .……
《鸿蒙开发进阶》
- Stage模型入门
- 网络管理
- 数据管理
- 电话服务
- 分布式应用开发
- 通知与窗口管理
- 多媒体技术
- 安全技能
- 任务管理
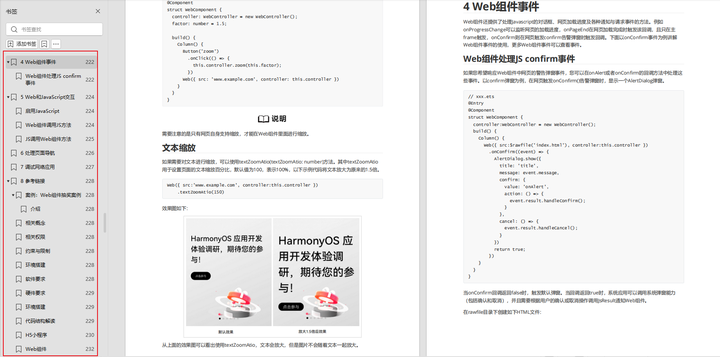
- WebGL
- 国际化开发
- 应用测试
- DFX面向未来设计
- 鸿蒙系统移植和裁剪定制
- ……
《鸿蒙进阶实战》
- ArkTS实践
- UIAbility应用
- 网络案例
- ……
获取以上完整鸿蒙HarmonyOS学习资料,请点击→纯血版全套鸿蒙HarmonyOS学习资料
总结
总的来说,华为鸿蒙不再兼容安卓,对中年程序员来说是一个挑战,也是一个机会。只有积极应对变化,不断学习和提升自己,他们才能在这个变革的时代中立于不败之地。


























![[项目实践]---RSTP生成树](https://img-blog.csdnimg.cn/direct/10640b9472da48a8ab91af23c23642ee.png)