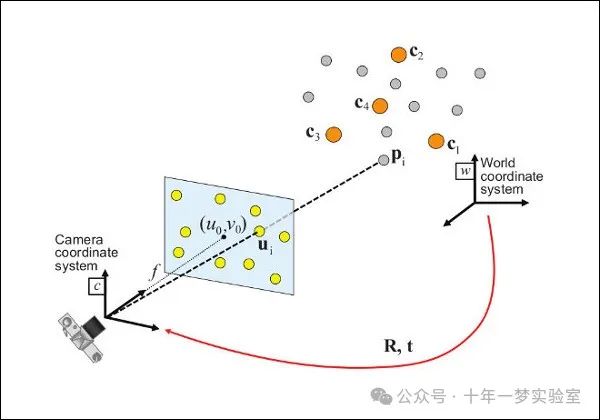
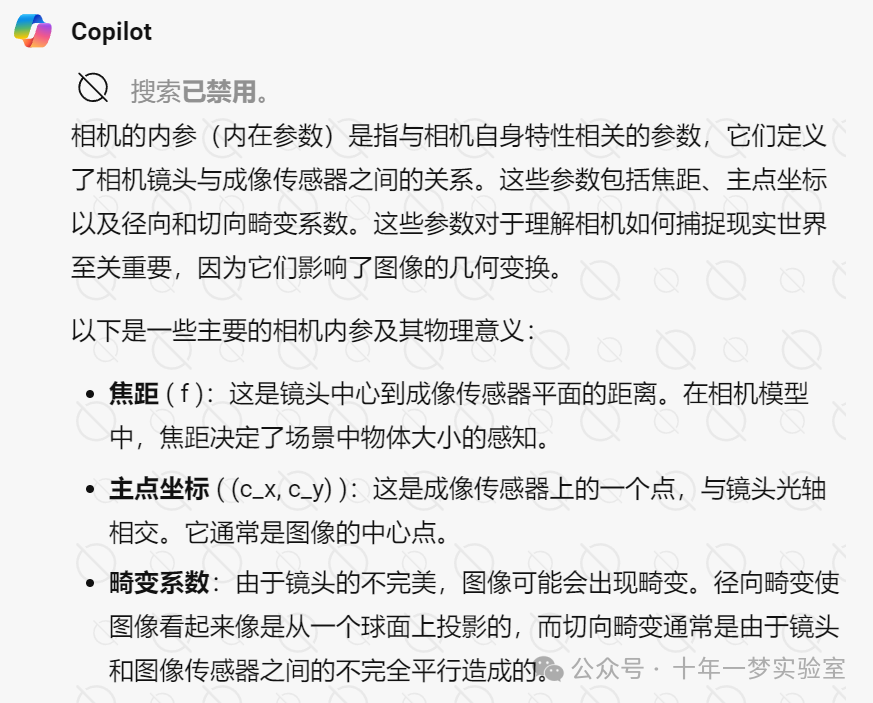
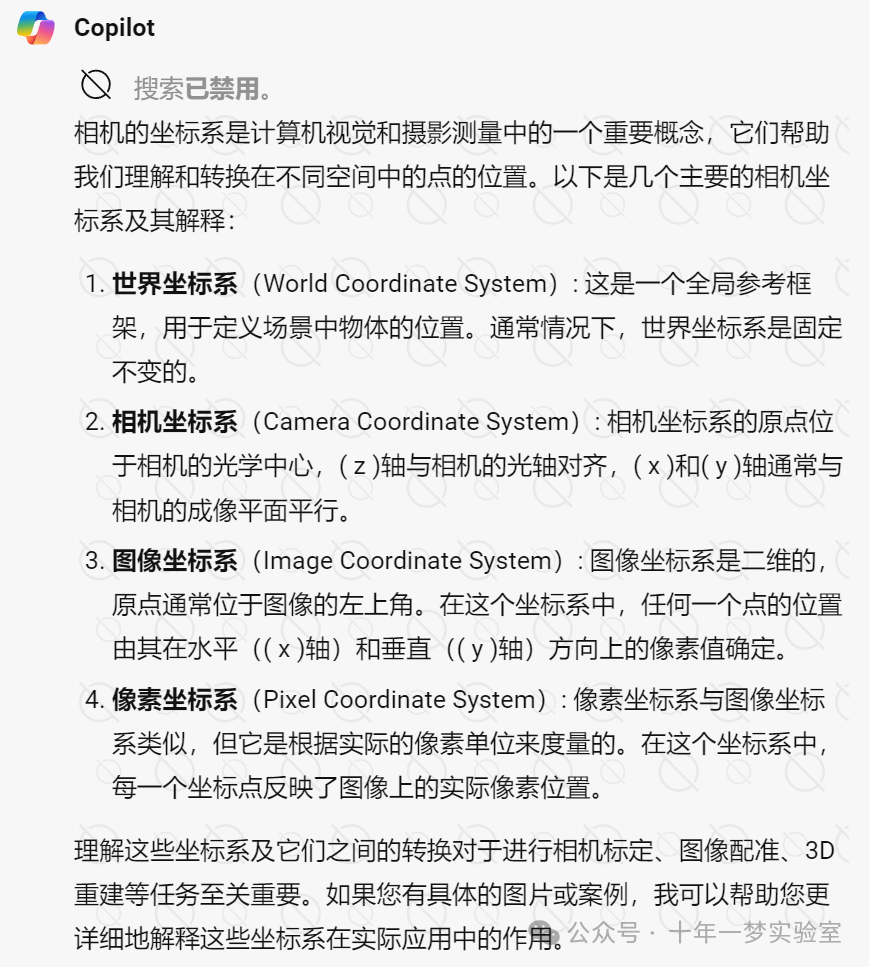
相机成像原理图
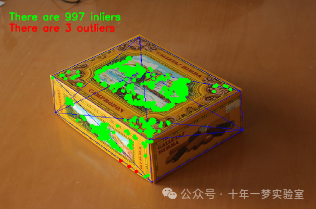
物体网格、关键点(局内点、局外点)图像
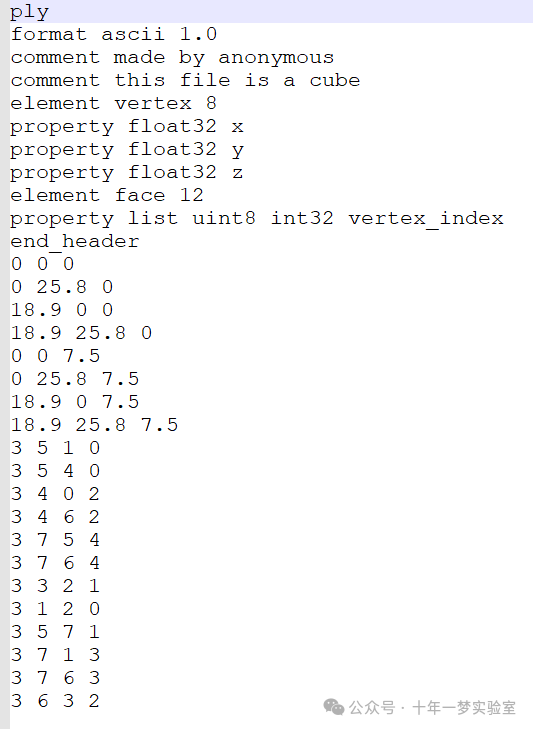
box.ply
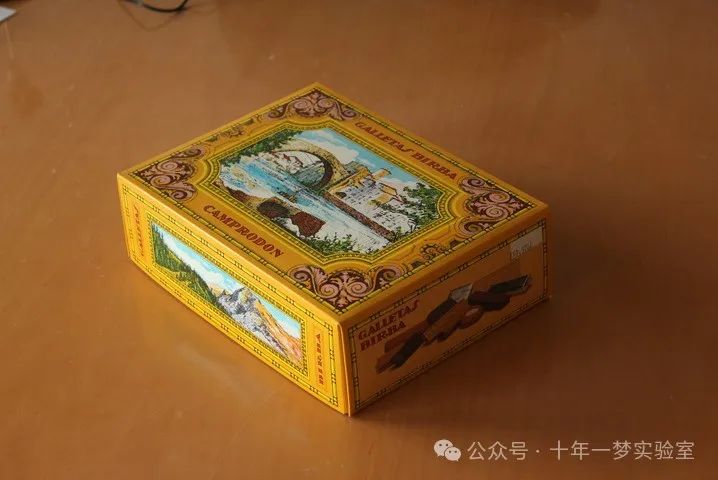
resized_IMG_3875.JPG
主程序main_registration.cpp
主要实现了利用OpenCV库进行3D模型的注册。主要步骤包括加载3D网格模型、使用鼠标事件选择对应的3D点进行2D到3D的注册、利用solvePnP算法计算摄像机位姿、并将结果保存在yaml文件中。这通常用于计算机视觉中的对象识别和姿态估计。程序也包括了绘制相应点、调试文本和3D物体网格的功能,以便更好地视觉化注册过程。
// 包含C++的输入输出流库
#include <iostream>
// 包含OpenCV的核心、图像处理、相机标定和特征点检测等功能的库
#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/calib3d.hpp>
#include <opencv2/features2d.hpp>
// 包含本教程的网格、模型、PNP问题、稳健匹配和模型注册以及工具等类
#include "Mesh.h"
#include "Model.h"
#include "PnPProblem.h"
#include "RobustMatcher.h"
#include "ModelRegistration.h"
#include "Utils.h"
// OpenCV和标准模板库的命名空间
using namespace cv;
using namespace std;
/** 全局变量 **/
// 注册是否完成的布尔型变量
bool end_registration = false;
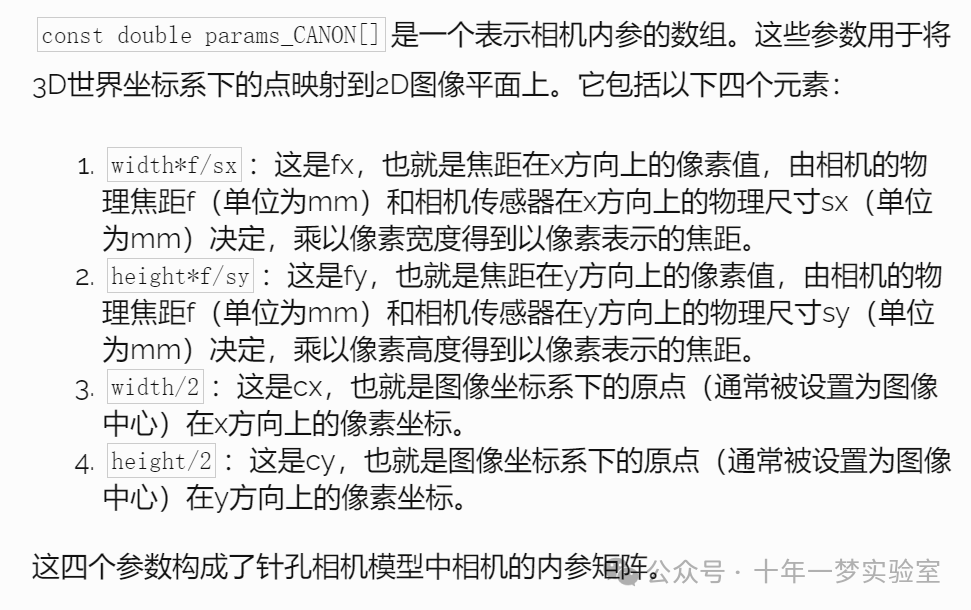
// 相机的内部参数: UVC WEBCAM
const double f = 45; // 焦距,以毫米为单位
const double sx = 22.3, sy = 14.9; // 传感器尺寸,以毫米为单位
const double width = 2592, height = 1944; // 图像宽度和高度
const double params_CANON[] = { width*f/sx, // fx
height*f/sy, // fy
width/2, // cx
height/2}; // cy
// 设置在图像中要注册的点
// 根据*.ply文件的顺序,从1开始
const int n = 8;
const int pts[] = {1, 2, 3, 4, 5, 6, 7, 8}; // 3 -> 4
/*
* 创建模型注册对象
* 创建网格对象
* 创建模型对象
* 创建PNP问题对象
*/
ModelRegistration registration;
Model model;
Mesh mesh;
PnPProblem pnp_registration(params_CANON);
/**********************************************************************************************************/
// 显示帮助信息的函数
static void help()
{
cout
<< "--------------------------------------------------------------------------" << endl
<< "这个程序展示了如何创建你的3D贴图模型。" << endl
<< "使用方法:" << endl
<< "./cpp-tutorial-pnp_registration" << endl
<< "--------------------------------------------------------------------------" << endl
<< endl;
}
// 鼠标事件回调函数,用于模型注册
static void onMouseModelRegistration( int event, int x, int y, int, void* )
{
// 如果检测到鼠标左键释放事件
if ( event == EVENT_LBUTTONUP )
{
// 检查是否可以注册
bool is_registrable = registration.is_registrable();
if (is_registrable)
{
// 获取已注册的点数
int n_regist = registration.getNumRegist();
// 获取需要注册的顶点编号
int n_vertex = pts[n_regist];
// 创建2D点
Point2f point_2d = Point2f((float)x,(float)y);
// 获取3D点
Point3f point_3d = mesh.getVertex(n_vertex-1);
// 注册点
registration.registerPoint(point_2d, point_3d);
// 如果达到最大注册点数,结束注册
if( registration.getNumRegist() == registration.getNumMax() ) end_registration = true;
}
}
}
/** 主程序 **/
int main(int argc, char *argv[])
{
// 调用帮助信息显示函数
help();
// 定义命令行参数
const String keys =
"{help h | | 打印帮助信息 }"
"{image i | | 输入图像的路径 }"
"{model | | 输出yml模型的路径 }"
"{mesh | | ply网格的路径 }"
"{keypoints k |2000 | 检测关键点的数量(仅用于ORB) }"
"{feature |ORB | 特征点名称 (ORB, KAZE, AKAZE, BRISK, SIFT, SURF, BINBOOST, VGG)}"
;
// 创建命令行解析器
CommandLineParser parser(argc, argv, keys);
// 定义默认图像路径、网格文件路径和输出文件路径以及其他参数
string img_path = samples::findFile("samples/cpp/tutorial_code/calib3d/real_time_pose_estimation/Data/resized_IMG_3875.JPG"); // 用于注册的图像
string ply_read_path = samples::findFile("samples/cpp/tutorial_code/calib3d/real_time_pose_estimation/Data/box.ply"); // 物体网格
string write_path = samples::findFile("samples/cpp/tutorial_code/calib3d/real_time_pose_estimation/Data/cookies_ORB.yml"); // 输出文件
int numKeyPoints = 2000;
string featureName = "ORB";
// 根据命令行提供的参数更新路径和参数值
if (parser.has("help"))
{
parser.printMessage();
return 0;
}
else
{
img_path = parser.get<string>("image").size() > 0 ? parser.get<string>("image") : img_path;
ply_read_path = parser.get<string>("mesh").size() > 0 ? parser.get<string>("mesh") : ply_read_path;
write_path = parser.get<string>("model").size() > 0 ? parser.get<string>("model") : write_path;
numKeyPoints = parser.has("keypoints") ? parser.get<int>("keypoints") : numKeyPoints;
featureName = parser.has("feature") ? parser.get<string>("feature") : featureName;
}
// 打印相关路径和参数信息
std::cout << "输入图像: " << img_path << std::endl;
std::cout << "CAD模型: " << ply_read_path << std::endl;
std::cout << "输出训练文件: " << write_path << std::endl;
std::cout << "特征点: " << featureName << std::endl;
std::cout << "ORB关键点数量: " << numKeyPoints << std::endl;
// 使用*.ply文件路径加载网格
mesh.load(ply_read_path);
// 实例化RobustMatcher类:检测器、提取器、匹配器
RobustMatcher rmatcher;
Ptr<Feature2D> detector, descriptor;
// 创建特征
createFeatures(featureName, numKeyPoints, detector, descriptor);
// 设置特征检测器和描述子提取器
rmatcher.setFeatureDetector(detector);
rmatcher.setDescriptorExtractor(descriptor);
/** 第一张图像的基本真实数据 **/
// 创建并打开窗口 创建一个保持原图像比例且大小可调的显示窗口,窗口的名字为"MODEL REGISTRATION"
namedWindow("MODEL REGISTRATION", WINDOW_KEEPRATIO);
// 设置鼠标事件
setMouseCallback("MODEL REGISTRATION", onMouseModelRegistration, 0);
// 打开要注册的图像
Mat img_in = imread(img_path, IMREAD_COLOR);//从 img_path 指定的文件中以彩色方式读入图像,然后将读入的图像数据存储在 Mat 类型的 img_in 中。
Mat img_vis; // 可视图像的副本
// 如果读取图像失败
if (img_in.empty()) {
cout << "无法打开或找到图像" << endl;
return -1;
}
// 设置要注册的点数
int num_registrations = n;//8
registration.setNumMax(num_registrations);
// 提示用户点击箱子角落
cout << "点击箱子角落..." << endl;
cout << "等待..." << endl;
// 定义一些基本颜色
const Scalar red(0, 0, 255);
const Scalar green(0,255,0);
const Scalar blue(255,0,0);
const Scalar yellow(0,255,255);
// 循环直到所有点被注册
while ( waitKey(30) < 0 )//如果在每30毫秒内没有接收到任何用户按键输入,那么就一直执行while循环中的代码。
{
// 刷新调试图像
img_vis = img_in.clone();
// 当前已注册的点
vector<Point2f> list_points2d = registration.get_points2d();
vector<Point3f> list_points3d = registration.get_points3d();
// 绘制当前已注册的点 圆点+坐标文字
drawPoints(img_vis, list_points2d, list_points3d, red);
// 如果注册未完成,绘制我们要注册的3D点。
// 如果注册已完成,跳出循环。
if (!end_registration)
{
// 绘制调试文字
int n_regist = registration.getNumRegist();
int n_vertex = pts[n_regist];
Point3f current_poin3d = mesh.getVertex(n_vertex-1);
drawQuestion(img_vis, current_poin3d, green);//绘制当前3D点的信息
drawCounter(img_vis, registration.getNumRegist(), registration.getNumMax(), red);//绘制计数文本
}
else
{
// 绘制调试文字
drawText(img_vis, "注册结束", green);
drawCounter(img_vis, registration.getNumRegist(), registration.getNumMax(), green);
break;
}
// 显示图像
imshow("MODEL REGISTRATION", img_vis);
}
/** 计算相机位置 **/
cout << "计算位置..." << endl;
// 已注册点的列表
vector<Point2f> list_points2d = registration.get_points2d();
vector<Point3f> list_points3d = registration.get_points3d();
// 根据已注册的点估计位置 通过使用潜在空间点(list_points3d)和2D图像空间点(list_points2d)的对应关系,对相机进行姿态估计
bool is_correspondence = pnp_registration.estimatePose(list_points3d, list_points2d, SOLVEPNP_ITERATIVE);
if ( is_correspondence )
{
cout << "找到对应点" << endl;
// 计算网格的所有2D点以验证算法并绘制
vector<Point2f> list_points2d_mesh = pnp_registration.verify_points(&mesh);
draw2DPoints(img_vis, list_points2d_mesh, green);
}
else {
cout << "没有找到对应点" << endl << endl;
}
// 显示图像
imshow("MODEL REGISTRATION", img_vis);
// 等待直到按下ESC键
waitKey(0);
/** 计算图像关键点的3D **/
// 模型关键点和描述子的容器
vector<KeyPoint> keypoints_model;
Mat descriptors;
// 计算关键点和描述子
rmatcher.computeKeyPoints(img_in, keypoints_model);
rmatcher.computeDescriptors(img_in, keypoints_model, descriptors);
// 检查关键点是否在注册图像的表面,并添加到模型中
//这段代码主要用于处理关键点模型中的每一个点,对于每个点,它创建
//一个对应的2D点,并使用PnP(Perspective-n-Point)注册并尝试
//将2D点反投影(backproject)回3D。如果反投影成功(即点在模型
//表面上),则在模型中添加对应的2D-3D点、描述符和关键点;否则,
//将该2D点添加到模型的离群点(outliers)中。这对于创建和调整3D模型
//,以及进行模型匹配和识别等任务来说,非常关键。
// 从零开始遍历关键点模型的每一个点
for (unsigned int i = 0; i < keypoints_model.size(); ++i) {
// 创建一个2D点,取自关键点模型的第i个点的位置
Point2f point2d(keypoints_model[i].pt);
// 创建一个空的3D点
Point3f point3d;
// 利用PnP(指视角nP点)识别并将2D点反投影到3D
// 若点在物体表面上,on_surface则为真;否则,为假
bool on_surface = pnp_registration.backproject2DPoint(&mesh, point2d, point3d);
// 若该点在物体表面上
if (on_surface)
{
// 在模型中添加对应的2D和3D点
model.add_correspondence(point2d, point3d);
// 向模型添加描述符,这是从描述符中的第i行取得的
model.add_descriptor(descriptors.row(i));
// 在对应模型中添加关键点,这是从关键点模型的第i个关键点取得的
model.add_keypoint(keypoints_model[i]);
}
// 若该点不在物体表面上
else
{
// 将该2D点添加到模型的异常值中
model.add_outlier(point2d);
}
}
// 设置训练图像路径
model.set_trainingImagePath(img_path);
// 保存模型到*.yaml文件
model.save(write_path);
// 输出图像
img_vis = img_in.clone();
// 模型的2D点列表
vector<Point2f> list_points_in = model.get_points2d_in();
vector<Point2f> list_points_out = model.get_points2d_out();
// 绘制一些调试文本
string num = IntToString((int)list_points_in.size());
string text = "有 " + num + " 个内点";
drawText(img_vis, text, green);
// 绘制一些调试文本
num = IntToString((int)list_points_out.size());
text = "有 " + num + " 个外点";
drawText2(img_vis, text, red);
// 绘制物体网格
drawObjectMesh(img_vis, &mesh, &pnp_registration, blue);
// 根据是否在表面绘制找到的关键点
draw2DPoints(img_vis, list_points_in, green);
draw2DPoints(img_vis, list_points_out, red);
// 显示图像
imshow("MODEL REGISTRATION", img_vis);
// 等待直到按下ESC键
waitKey(0);
// 关闭并销毁窗口
destroyWindow("MODEL REGISTRATION");
cout << "再见" << endl;
}知识点:
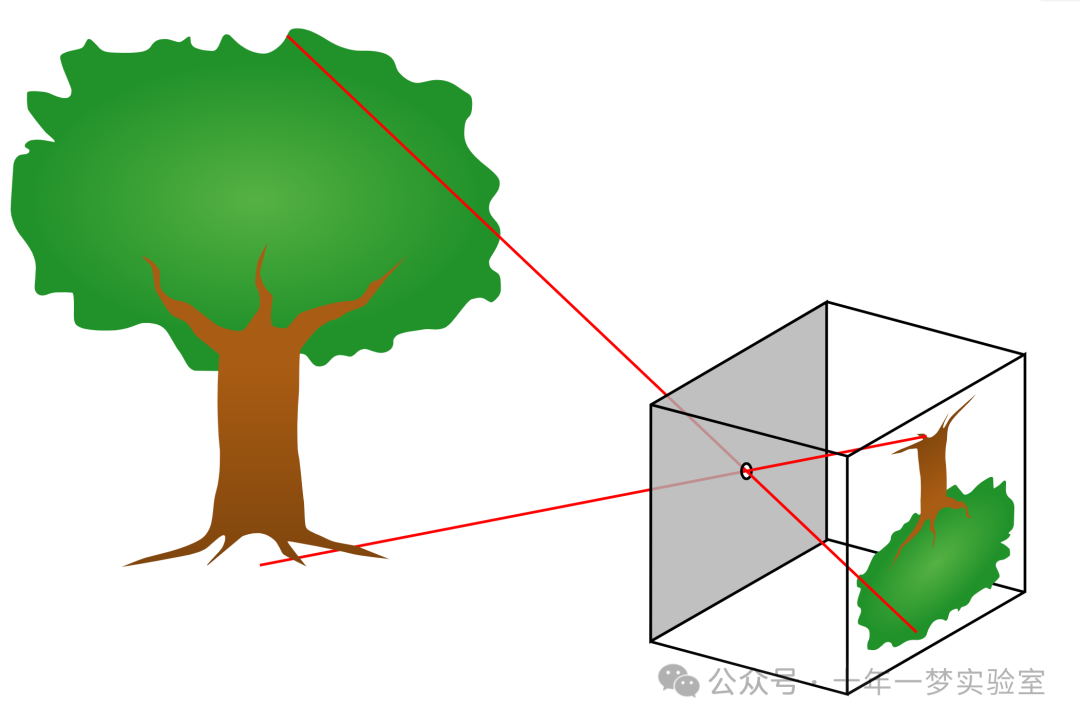
小孔成像模型
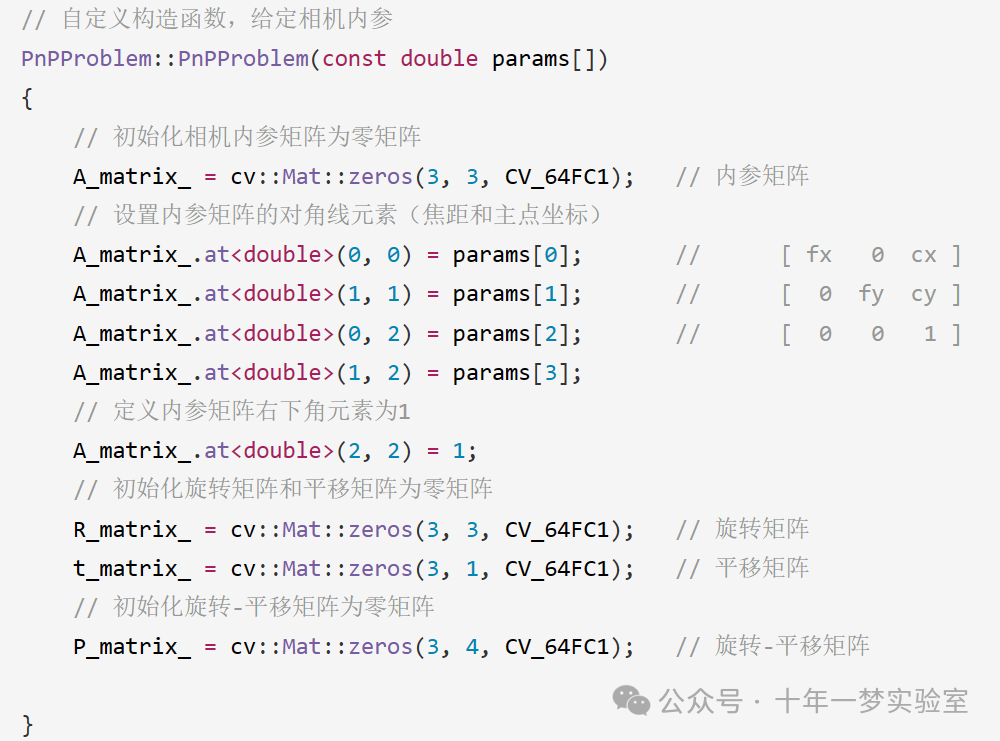
创建PNP问题对象
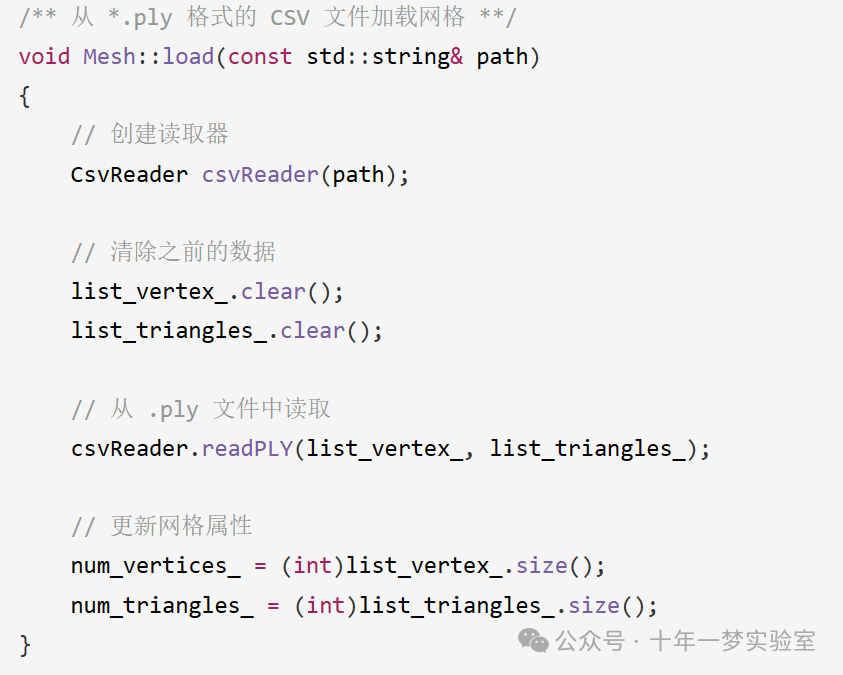
加载ply网格
不同特征检测器和描述符提取器

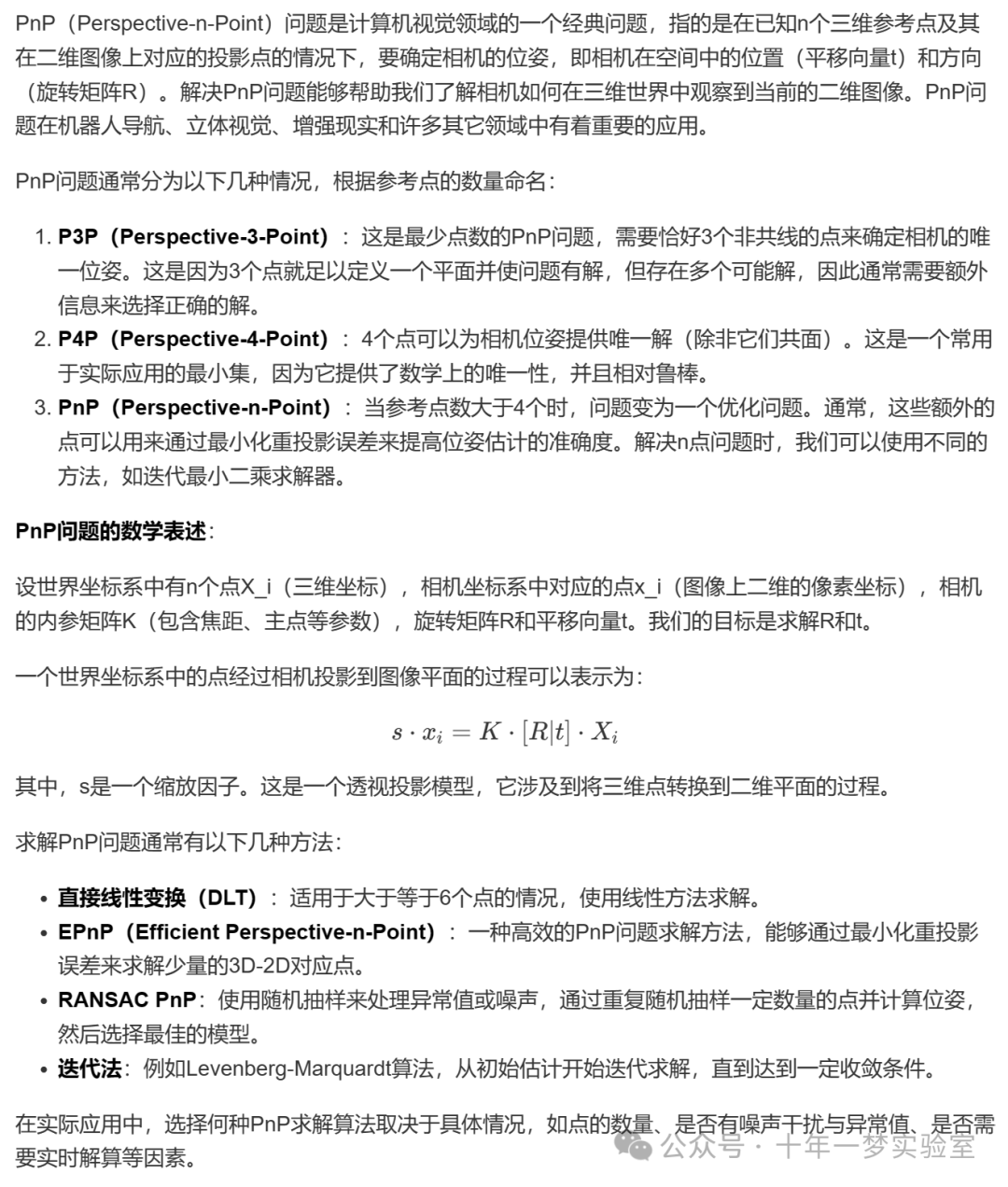
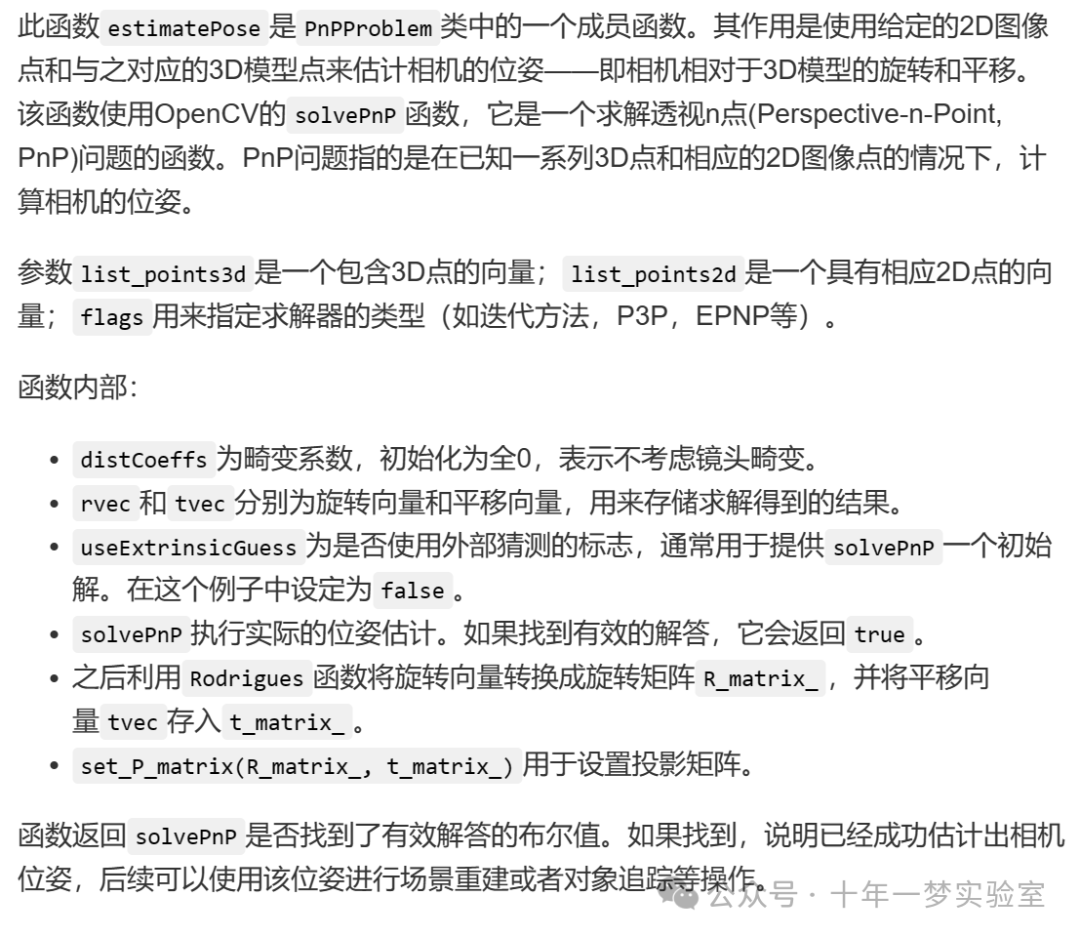
估计相机的位姿:即相机相对于3D模型的旋转和平移
// 给定2D/3D对应点列表和使用的方法,估计姿态的函数
bool PnPProblem::estimatePose( const std::vector<cv::Point3f> &list_points3d,
const std::vector<cv::Point2f> &list_points2d,
int flags)
{
// 初始化畸变系数矩阵、旋转向量和平移向量
cv::Mat distCoeffs = cv::Mat::zeros(4, 1, CV_64FC1);
cv::Mat rvec = cv::Mat::zeros(3, 1, CV_64FC1);
cv::Mat tvec = cv::Mat::zeros(3, 1, CV_64FC1);
// 使用外部猜测?(暂不使用)
bool useExtrinsicGuess = false;
// 姿态估计
bool correspondence = cv::solvePnP( list_points3d, list_points2d, A_matrix_, distCoeffs, rvec, tvec,
useExtrinsicGuess, flags);
// 将旋转向量转换为矩阵
Rodrigues(rvec, R_matrix_);
t_matrix_ = tvec;
// 设置投影矩阵
this->set_P_matrix(R_matrix_, t_matrix_);
return correspondence;
}
相机的位姿估计与物体的位姿估计区别
参考网址:
https://zhuanlan.zhihu.com/p/389653208
https://zh.wikipedia.org/wiki/%E9%87%9D%E5%AD%94%E7%9B%B8%E6%A9%9F 针孔相机
http://www.powersensor.cn/p3_demo/demo4-camIdentify.html
https://blog.51cto.com/u_14439393/5732298
The End