先以一篇综述开头:
基于点云的机器人抓取识别综述
https://zhuanlan.zhihu.com/p/159467103
然后注意到综述中也提到了基于投票的PPF思想,顺着这条线,找出以下文献。
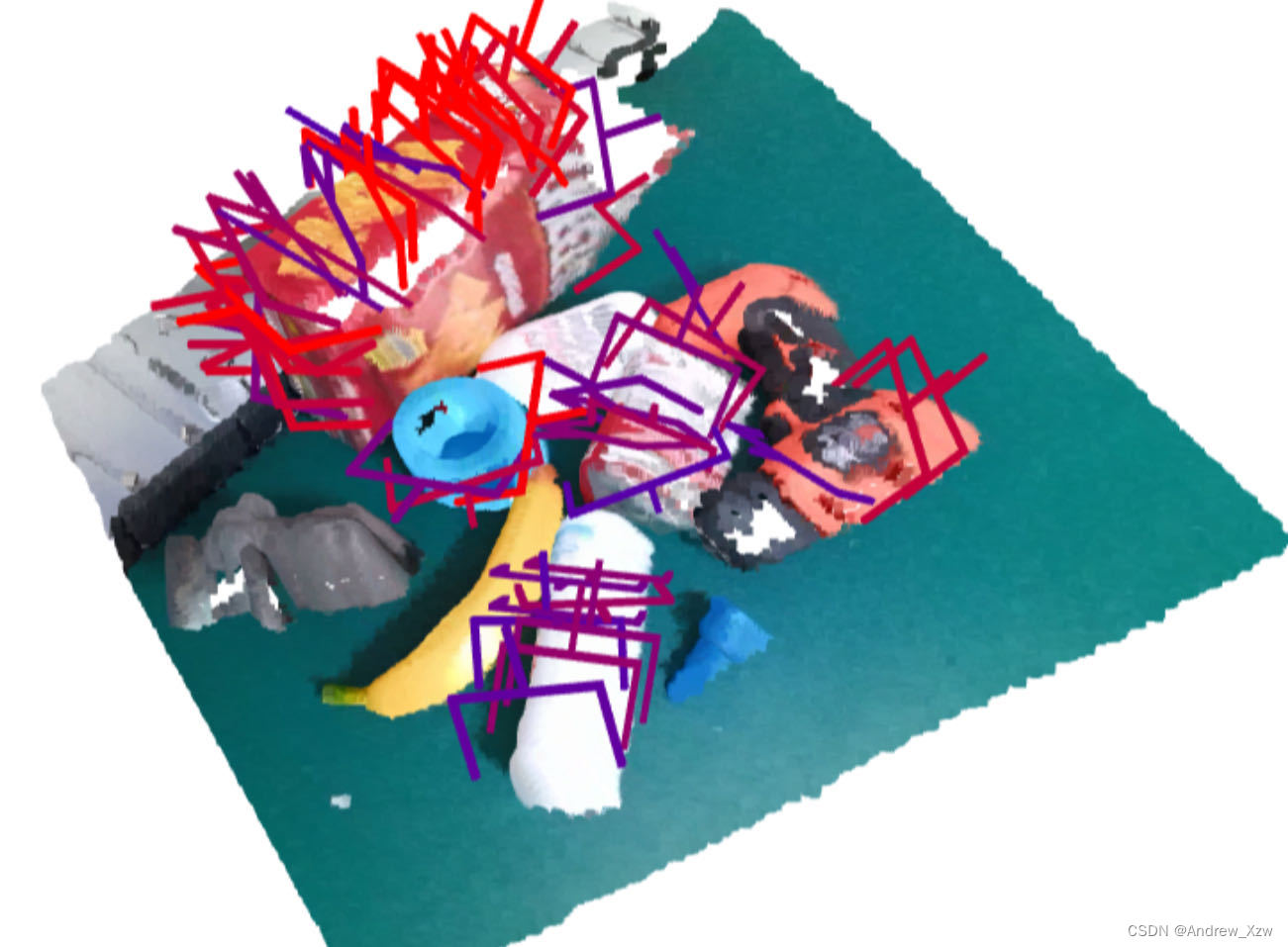
1. “Model globally, match locally: Efficient and robust 3D object recognition”
这篇文章是PPF的
先以一篇综述开头:
基于点云的机器人抓取识别综述
https://zhuanlan.zhihu.com/p/159467103
然后注意到综述中也提到了基于投票的PPF思想,顺着这条线,找出以下文献。
1. “Model globally, match locally: Efficient and robust 3D object recognition”
这篇文章是PPF的