1.鱼眼摄像机
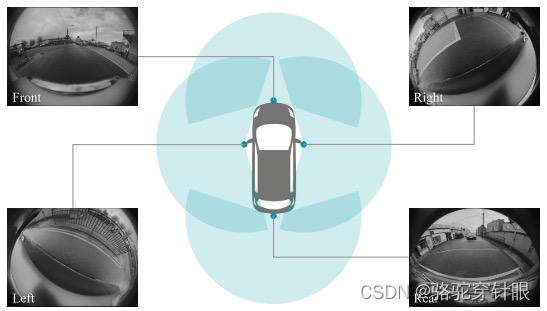
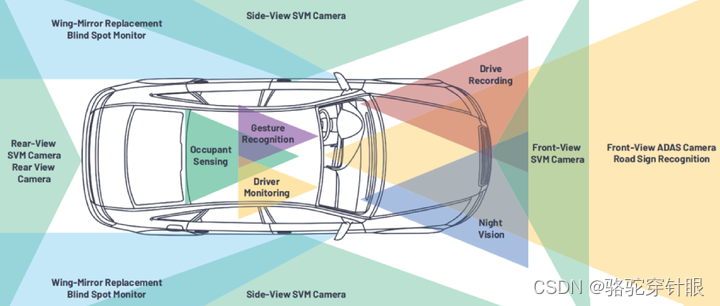
其他摄像机的位置
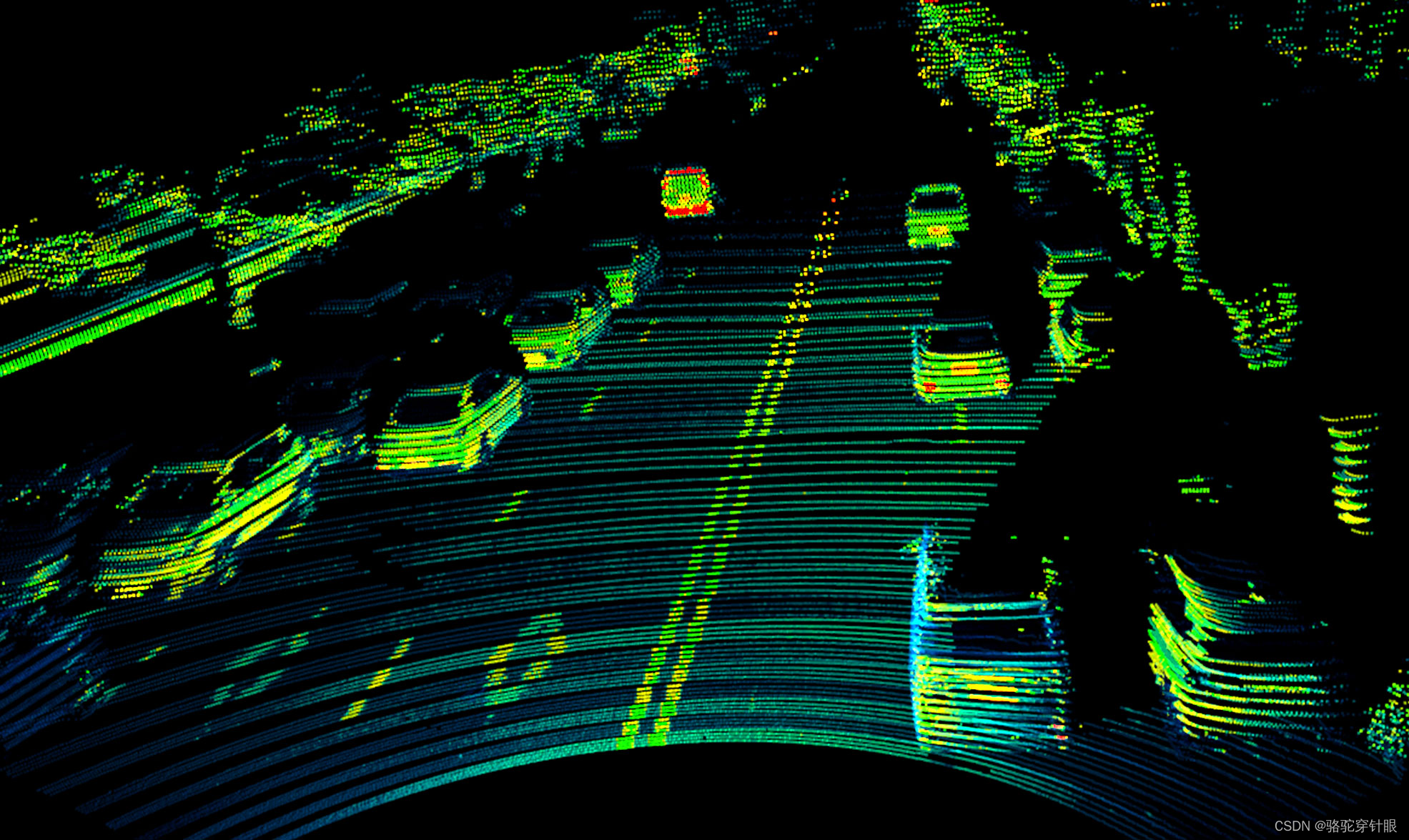
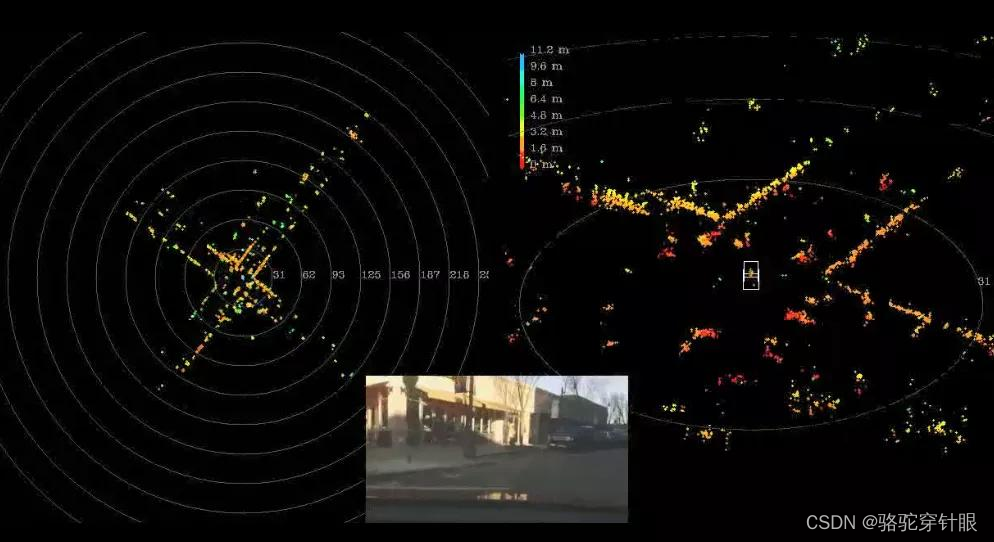
2.激光雷达

3.Radar

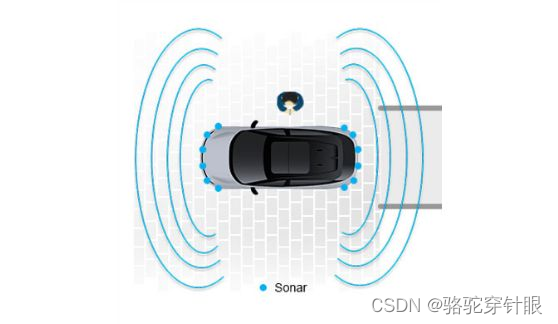
4.sonar 声纳

各个传感器的对比

相机类型
一般来说,相机可以分为单目相机、双目相机和多视角相机。
- 单目相机:最常见的相机类型,只有一个镜头。
- 双目相机:有两个镜头,类似于人眼的结构。
- 多视角相机:拥有多个镜头,可以从不同角度拍摄图像。
基础概念
为了理解不同相机系统的运作方式,我们需要了解以下基础概念:
- 内参:描述相机本身的特性,例如焦距、光学中心等。
- 外参:描述相机相对于世界的位置和姿态。
- 对极几何:描述两个相机之间的几何关系,以及如何利用这些关系来计算深度信息。
| 相机类型 | 优点 | 缺点 |
|---|---|---|
| 单目相机 | 成本低、结构简单 | 无法直接获取深度信息 |
| 双目相机 | 能获取深度信息 | 需要精确的相机标定 |
| 多视角相机 | 能获取更全面的信息 | 成本高、计算复杂 |
多视角相机在自动驾驶中的应用
多视角相机是BEV方案的核心输入。BEV(Bird’s Eye View)是一种从上帝视角俯瞰的3D地图,可以帮助自动驾驶系统更好地理解周围环境。
双目相机在自动驾驶中的应用
双目相机是一种与动物/人类视觉系统非常接近的相机。在矫正良好的双目视觉系统中,两个相机只有水平方向的视差,可以利用对极信息来恢复真实的深度,从而得到真实的3D信息。目前,双目相机是一种替代camera+lidar的自动驾驶方案,业内有DJI、PhiGent Robotics等厂商使用和探索。
单目相机在自动驾驶中的应用
单目相机一般用于自动驾驶的前视摄像头,可以看到比较远的距离。其缺点在于因为没有相机视野之间的overlap,无法从对极信息来恢复真实深度,只能用数据驱动的方法来估计,存在泛化性问题。
结论
自动驾驶中的视觉方案仍然是一种数据驱动的方案。MVS虽然可以利用对极信息来恢复深度,但是overlap也非常少,类似于单目相机系统。
需要注意的点
自动驾驶中的MVS其实overlap也非常少,类似于单目相机系统。
纯视觉的BEV/Occupancy方案其实仍然是一种数据驱动的方案。




![[图形学渲染]大白话推导三维重建-<span style='color:red;'>摄像机</span>内参(Intrinsic)、外参(extrinsic)、世界坐标相机坐标转换、3D物体投影归一化、<span style='color:red;'>单</span><span style='color:red;'>双目</span><span style='color:red;'>摄像头</span>、<span style='color:red;'>视差</span>(Disparity)](https://img-blog.csdnimg.cn/direct/ba3d19cfbd9c4315b5442d519e66591d.png)