随着 3D 数据需求的增长,对有效方法来分类和理解 3D 数据的需求也在增长。PointNet由斯坦福大学研究人员于 2016 年发明,是快节奏的 ML 世界中的化石,但它经受住了时间的考验。就在 2023 年,研究人员发布了 PointNet 架构的变体,用于执行多种任务,例如:
- 尖峰神经网络
- 预测穿过多孔介质的流体流动
- 森林场景中的垂直结构分割
- 3D人脸验证
- 基于雷达的人体活动识别
- 单孔气膜冷却
- 还有很多
PointNet 专为解决 3D 点云数据固有的复杂性而设计,在 3D 数据的使用比以往更加普遍的时代提供了强大且多功能的解决方案。
为了帮助我们完成 PointNet 之旅,我们将使用PyTorch3D。PyTorch3D 来自 Facebook AI Research (FAIR),是一个灵活高效的 3D 深度学习任务框架,使研究人员和从业者能够深入研究 3D 机器学习的复杂性。凭借其丰富的工具集,我们可以可视化和操作 3D 数据,以使用 PointNet 构建 3D 对象分类模型。
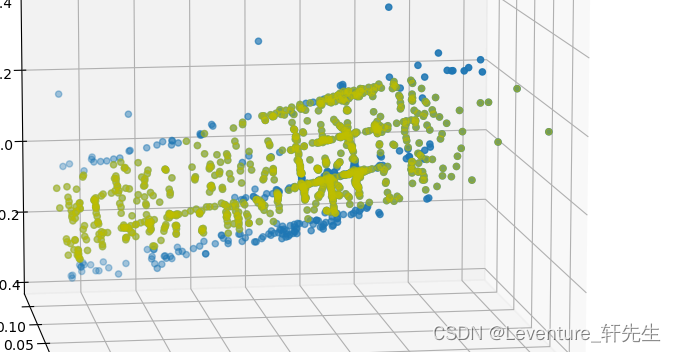
点云
三维空间中任何无序点的集合都可以视为点云。想象一下 3D 散点图。现实世界物体的形状可以粗略地近似为欧几里德空间中的(x, y, z)坐标列表。
点云数据在现实世界中频繁出现。例如,自动驾驶汽车中激光雷达扫描仪的数据流就是点云。自动驾驶车辆必须区分人、盒子、墙壁和其他物体,才能安全地在其环境中行驶并完成任务。因此,它需要实时了解周围环境的方法。
PointNet 的用例
PointNet 是一种高效的架构,支持许多此类应用,包括增强现实、3D 扫描等。它的多功能性和简单性使其能够支持不仅仅是分类的任务,包括(但不限于):
- 3D 物体检测
- 点法线的预测
- 物体部分的分割
- 语义场景分割
PointNet 还具有高度可扩展性,许多已发表的增强或扩展 PointNet 架构的论文就证明了这一点。
PointNet 的属性
PointNet 拥有多种巧妙的特性,使其在处理 3D 数据方面特别有效。
首先,PointNet 不关注点关系或序列。换句话说,它是排列不变的。3D 模型和点云中的点顺序通常不提供有关其应表示的对象的有意义的信息。因此,在 3D 模式中随机化点的顺序不应改变对象的身份。排列不变性属性允许 PointNet 泛化到具有不同点空间排列的对象。
同样,如果旋转或移动对象,其身份不应改变。即使椅子被倒置或移到一边,它仍然是椅子。PointNet 有一个巧妙的设计来补偿变换,使其有效地具有变换不变性。
另一方面,PointNet 确实关注点之间的接近程度。这是一个理想的特性,因为距离较近的点通常比距离较远的点彼此之间的相关性更密切。这对于 3D 零件