Open3D基础 - 点云配准详细介绍
Open3D点云配准介绍-点云之间进行配准
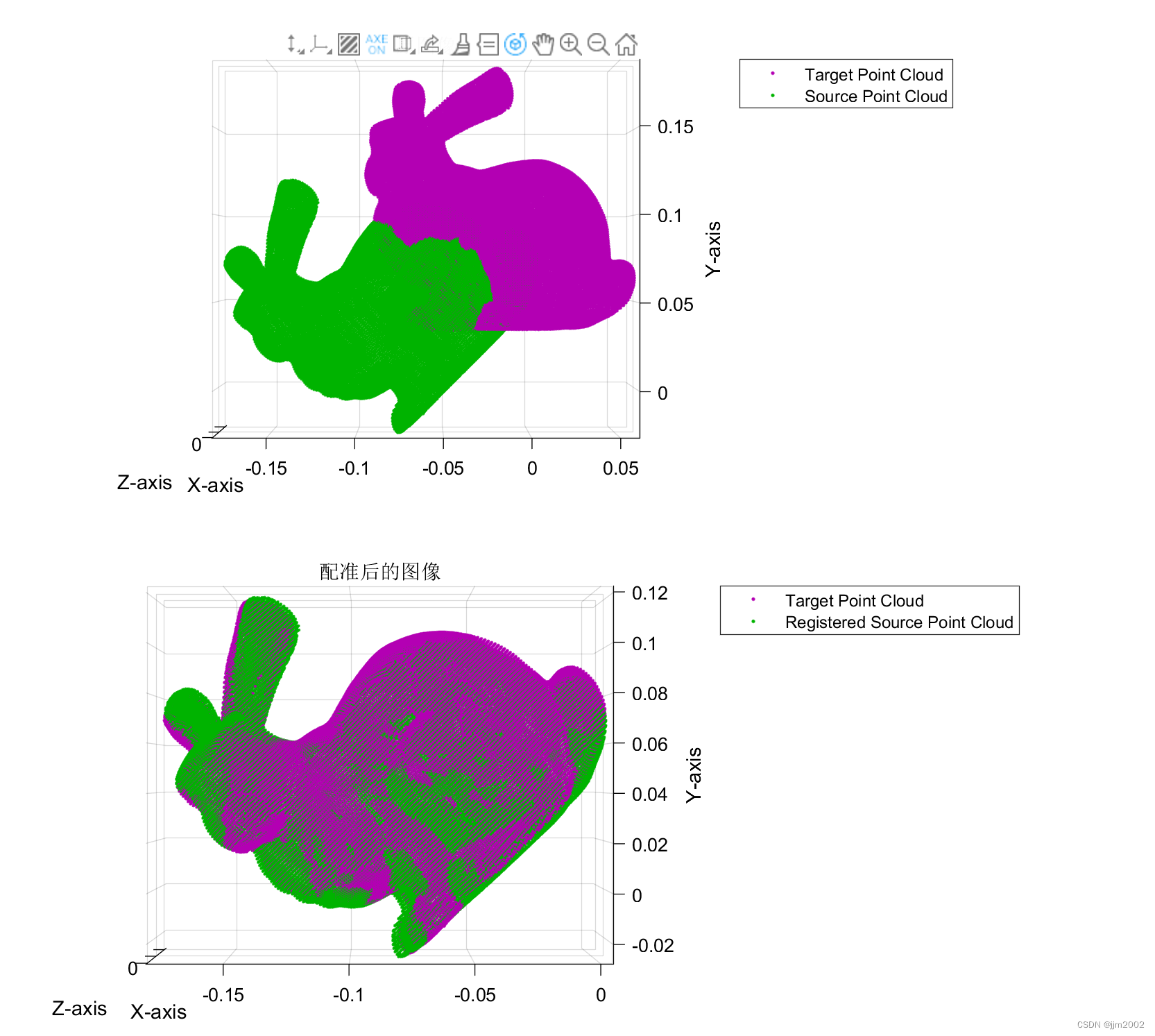
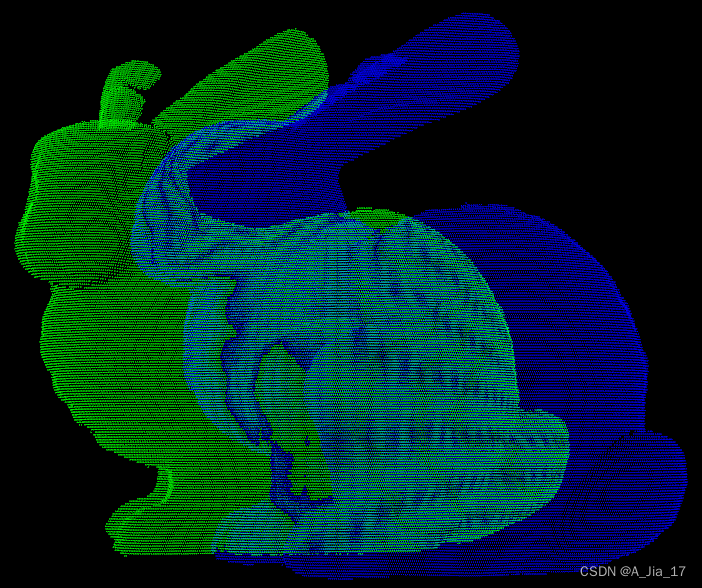
点云之间进行配准
两块点云进行配准
API接口
# API官方介绍:
def registration_icp(source, target, max_correspondence_distance, init, *args, **kwargs): # real signature unknown; NOTE: unreliably restored from __doc__
"""
registration_icp(source, target, max_correspondence_distance, init=(with default value), estimation_method=TransformationEstimationPointToPoint without scaling., criteria=ICPConvergenceCriteria class with relative_fitness=1.000000e-06, relative_rmse=1.000000e-06, and max_iteration=30)
Function for ICP registration
Args:
source (open3d.geometry.PointCloud): 原点云.
target (open3d.geometry.PointCloud): 目标点云.
max_correspondence_distance (float): 最大通信点对距离.
init (numpy.ndarray[numpy.float64[4, 4]], optional): 初始估计变换矩阵
默认值:
array([[1., 0., 0., 0.],
[0., 1., 0., 0.],
[0., 0., 1., 0.],
[0., 0., 0., 1.]])
estimation_method (open3d.pipelines.registration.TransformationEstimation, optional, default=TransformationEstimationPointToPoint without scaling.):配准计算方法.
One of (``TransformationEstimationPointToPoint, TransformationEstimationPointToPlane` TransformationEstimationForGeneralizedICP, TransformationEstimationForColoredICP)
criteria (open3d.pipelines.registration.ICPConvergenceCriteria, optional, default=ICPConvergenceCriteria class with relative_fitness=1.000000e-06, relative_rmse=1.000000e-06, and max_iteration=30): Convergence criteria
Returns:
open3d.pipelines.registration.RegistrationResult
"""
pass
案例
# 点对点配准
import copy
import numpy as np
from open3d.cpu.pybind.pipelines import *
from open3d.cpu.pybind import io, geometry, visualization
def draw_registration_result_original_color(source, target, transformation, show_coord=False, coord_length=200):
"""
:param source:
:param target:
:param transformation:
:param show_coord: 是否显示坐标轴网格
"""
source_temp = copy.deepcopy(source)
source_temp.transform(transformation)
geomes = [source_temp, target]
if show_coord:
# 坐标系网格
mesh = geometry.TriangleMesh().create_coordinate_frame(size=coord_length)
geomes.append(mesh)
visualization.draw_geometries(geomes,
point_show_normal=False,
mesh_show_wireframe=True,
)
pass
if __name__ == '__main__':
# 原点云,要被进行矩阵变换的点云
pcd_source = io.read_point_cloud(f'./pcd_source.ply')
# 目标点云,希望变换到该点云位置的点云
pcd_target = io.read_point_cloud(f'./pcd_target.ply')
# 该参数根据具体点云特征进行适当变更,如果值太小两点云会无法重合!
max_correspondence_distance = 1000
# 初始变换矩阵, 如果配准之前知道大概的变换矩阵,传入后可加快点云配准速度和成功率!
init = np.identity(4)
# 调用配准接口,得到配准结果
result_icp: registration.RegistrationResult = registration.registration_icp(
pcd_source, pcd_target,
max_correspondence_distance, init,
registration.TransformationEstimationPointToPoint(),
registration.ICPConvergenceCriteria(relative_fitness=1e-6,
relative_rmse=1e-8,
max_iteration=10000))
# 获取变换矩阵
transformation = result_icp.transformation
print(result_icp)
# 给点云上色
pcd_source.paint_uniform_color([1, 0.706, 0]) # source 为黄色
pcd_target.paint_uniform_color([0, 0.651, 0.929]) # target 为蓝色
# 显示
draw_registration_result_original_color(pcd_source, pcd_target, transformation)
pass
注意事项
最终的配准结果 result_icp 是将 pcd_source 变换到 pcd_target 的变换矩阵!别搞反了,这是新手很容易犯的错误!