文章目录
kd树
k-d树是一种点云划分方法,基本思路是,对方差最差的维度进行二分分割,从而得到两个子集,再对这两个子集进行相同的操作,直到所有子集的元素个数低于设定值,在opend3d中生成一个kd树的方法如下
import open3d as o3d
pcdPath = o3d.data.PCDPointCloud().path
pcd = o3d.io.read_point_cloud(pcdPath)
kdt = o3d.geometry.KDTreeFlann(pcd)
【KDtreeFlann】类,是open3d中最基础的kd树。这种数据结构,对数据索引来说十分便捷,能够将原本的 O ( n 2 ) O(n^2) O(n2)复杂度降低到类似 O ( ln n ) O(\ln n) O(lnn)的水平。KDTreeFlann针对索引半径、索引范围,主要提供了三种索引方式
# 通过距离和最大点数来索引
search_hybrid_vector_3d(query, radius, max_nn)
# 通过点数索引
search_knn_vector_3d(self, query, knn)
# 通过半径索引
search_radius_vector_3d(self, query, radius)
# 综合索引方法, search_param为专门为kd树提供的参数对象
search_vector_3d(self, query, search_param)
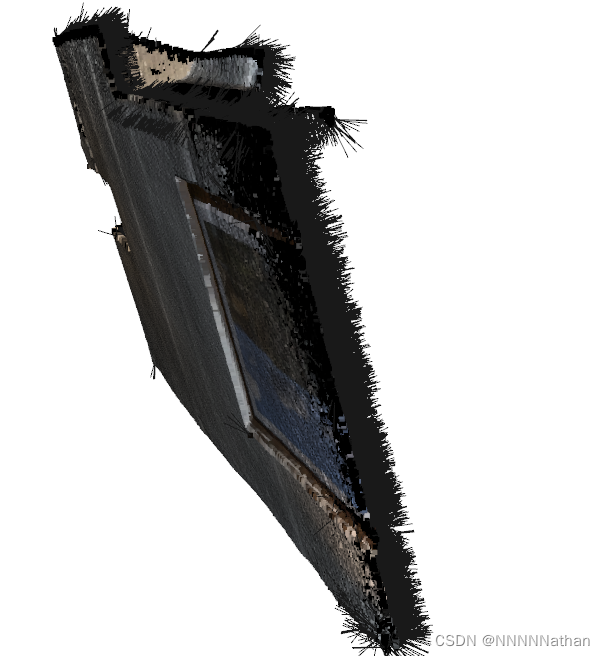
对于这四种 3 d 3d 3d方法,都有一个与之对应的 x d xd xd版本,可以用于更高或者更低维度的 kd-tree的索引。下图分别使用了基于点数和基于半径的方法进行索引,红色表示距离第70000号点最近的10个点;绿色表示距离70000号点距离小于0.2米的点。

代码如下
from copy import deepcopy
kdPCD = deepcopy(pcd)
kdPCD.paint_uniform_color([0.5, 0.5, 0.5])
k, idx, _ = kdt.search_radius_vector_3d(kdPCD.points[70000], 0.2)
for i in idx: kdPCD.colors[i] = [0, 1, 0]
print(k) # 2480
_, idx, _ = kdt.search_knn_vector_3d(kdPCD.points[70000], 10)
for i in idx: kdPCD.colors[i] = [1, 0, 0]
o3d.visualization.draw_geometries([kdPCD])
八叉树
oc树是一种空间栅格化方法,其思路来自于二分法。
以一维空间举例,就是对一条线段不断地二分,得到一系列的子线段,如果子线段中包含的元素大于2,那么就继续分割,直到所有子线段中至多只有一个元素为止。
就一维而言是二分,二维空间是四分,三维空间就是八分了,故而是八叉树。
【Octree】是open3d中最简单的八叉树,其创建方法为先建立对象,再注入点云数据。
octree = o3d.geometry.Octree(max_depth=6)
octree.convert_from_point_cloud(pcd, size_expand=0.01)
o3d.visualization.draw_geometries([octree])
直观感受一下大致是这种

其中,参数max_depth可以理解为八分的最多次数。这个东西很微妙,如果不设置,当一个小区域内有大量点的时候,就会不断地分割下去,很浪费性能。size_expand是一个微小的膨胀系数,从而让每个方块把点包裹进去。
为了让这棵八叉树更加清晰,可以对点云上色
octree = o3d.geometry.Octree(max_depth=5)
octree.convert_from_point_cloud(pcd, size_expand=0.01)
o3d.visualization.draw_geometries([octree])
效果如下,有种我的世界的既视感。

除了通过点云生成八叉树,也可以通过体元生成八叉树
vxs = o3d.geometry.VoxelGrid.create_from_point_cloud(pcd, voxel_size=0.01)
octree = o3d.geometry.Octree(max_depth=6)
octree.create_from_voxel_grid(vxs)
其绘制结果和上面的图是一样的,故不再展示。
DBSCAN聚类
无论kd树还是oc树,都是通过临近点的点云分割方法,其主要目的是索引。相比之下,聚类则是十分常用的语义分割方式。
DBSCAN,即Density-Based Spatial Clustering of Applications with Noise,基于密度的噪声应用空间聚类。在DBSCAN算法中,将数据点分为三类:
- 核心点:若样本 x i x_i xi的 ε \varepsilon ε邻域内至少包含了 M M M个点,则为核心点
- 边界点:若样本 x i x_i xi的 ε \varepsilon ε邻域内包含的点数小于 M M M,但在其他核心点的 ε \varepsilon ε邻域内,则为边界点
- 噪声:既非核心点也非边界点则为噪声
可见,DBSCAN算法需要两个参数,分别是邻域半径 ε \varepsilon ε和点数 M M M。
令 ε = 0.1 , M = 50 \varepsilon=0.1, M=50 ε=0.1,M=50,则其聚类效果如下,完美实现了语义分割。

代码如下
import numpy as np
import matplotlib.pyplot as plt
pcdDB = deepcopy(pcd)
Labels = np.array(pcdDB.cluster_dbscan(0.1, 50))
print(np.max(Labels)) # 得到结果为2
cs = plt.get_cmap("jet")(Labels/3) # 伪彩映射
cs[labels < 0] = 0 # labels = -1 的簇为噪声,以黑色显示
pcdDB.colors = o3d.utility.Vector3dVector(cs[:, :3])
o3d.visualization.draw_geometries([pcdDB])
其中,【cluster_dbscan】即为DBSCAN聚类方法,输入参数分别是 ε \varepsilon ε,表示同一聚类中最大点间距; M M M表示有效聚类的最小点数。
其聚类结果的最大值是 2 2 2,说明分成了 0 , 1 , 2 0,1,2 0,1,2总共三类,与图像显示的结果是一致。
RANSAC 平面分割
RANSAC,即 RANdom SAmple Consensus,随机抽样一致算法。
以平面上的点集举例,假设点集中有一条直线 L L L, L L L外的点很少,均为噪声。
那么第一步,随机选取两个点连成一条直线 L ^ \hat L L^,那么这条直线有可能就是 L L L,也有可能是噪声连出来的莫名其妙的一条线。
接下来,随机抽取点集中的一些点,如果随机抽取的大部分点都落在 L L L附近,那么就说明 L ^ \hat L L^有很大的概率就是 L L L;否则说明不太像是 L L L。随着抽取出的直线越来越多,最后可以得到最接近 L L L的直线,从而完成了对点集的分割。
【segment_plane】是open3d中基于RANSAC算法的平面分割方法,其主要输入参数为内点到平面模型的最大距离d,用于拟合平面的采样点数n,以及最大迭代次数nIter。
令 d = 0.05 , n = 5 d=0.05, n=5 d=0.05,n=5,最大迭代50次,其平面分割结果为

代码如下
plane, ids = pcd.segment_plane(0.05, 5, 50)
iCloud = pcd.select_by_index(ids)
iCloud.paint_uniform_color([0, 0, 1])
oCloud = pcd.select_by_index(ids, invert=True)
oCloud.paint_uniform_color([0.5, 0.5, 0.5])
o3d.visualization.draw_geometries([iCloud, oCloud])
该方法有两个返回值,plane即为分割得到的平面方程的 A B C D ABCD ABCD参数,ids即处于平面内的点。