电赛在即,每次比赛调PID都是一件比较繁琐的事。每次都要在程序中改完再烧录到板子上,特别耗时。正好最近发现实验室的一块串口屏比较好玩。

于是就做了这个调PID的东西。它可以通过串口直接修改PID的值,从而达到快速调PID的目的。下面我将完整工程分享给大家。
一、串口屏
想要详细学串口屏的同学直接点击下面的官方文档学习就行。但对于大部分同学来说,只要会用就行。
淘晶驰资料中心 — 淘晶驰资料中心 1.1.0-2024-03-19 11:50:47 文档 (tjc1688.com)
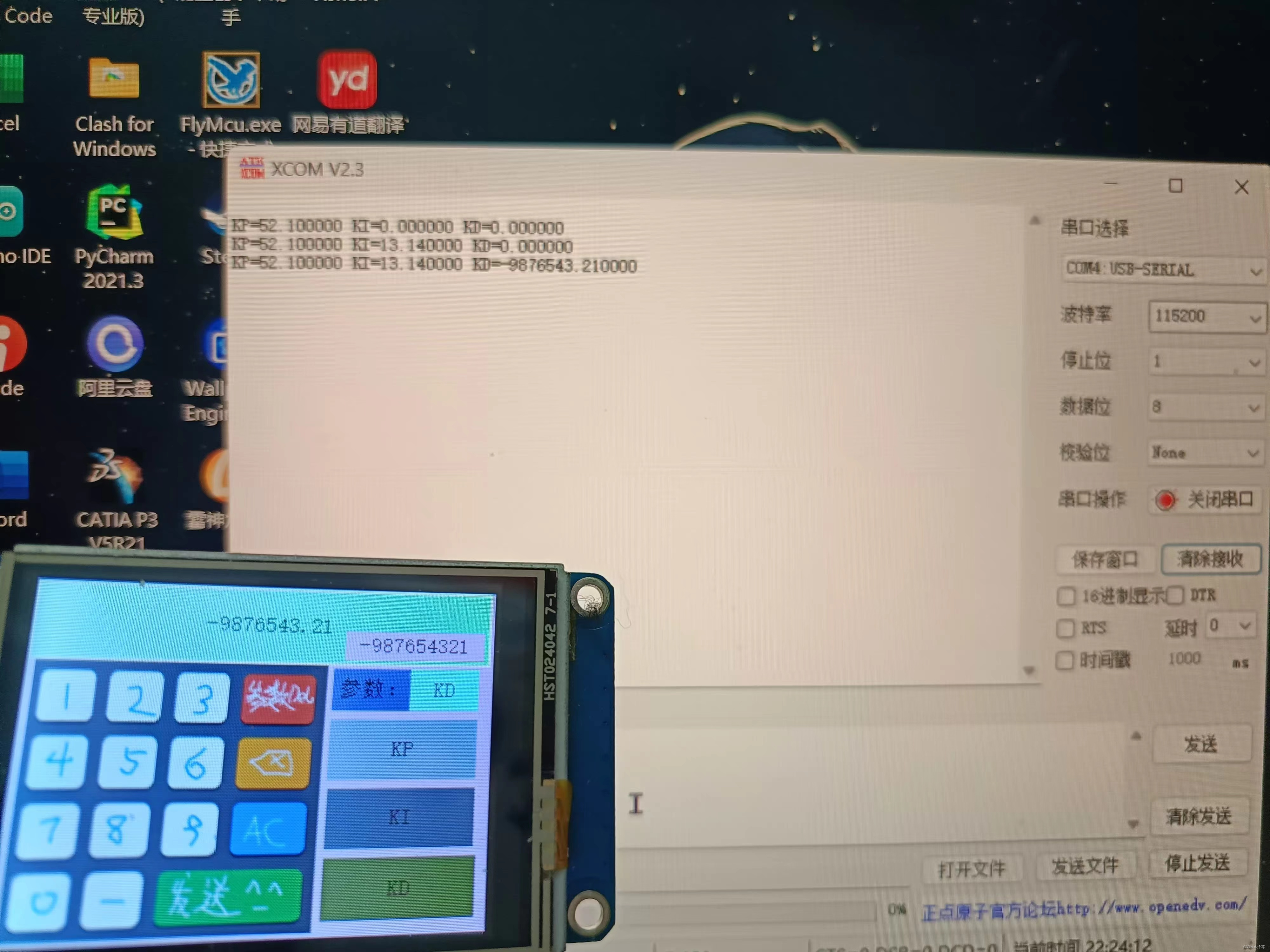
下面就是PID调参器的主页面。(大家洗不洗欢嘞!!!)
PID的调节可以支持21000000.00~-21000000.00以内,可支持2位小数(这个可以设置,下面会说明)

二、STM32函数
int changePID(double *KP,double *KI,double *KD)
{
double val=0;
u8 x[3];
u8 a=0;
u8 sta=0;
u8 fushu=0;
u8 t;
u8 len;
if(USART_RX_STA&0x8000)//串口1接收到数据
{
len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度
for(t=0;t<len;t++)
{
// USART2->DR=USART_RX_BUF[t];
// while((USART2->SR&0X40)==0);//等待发送结束
if(USART_RX_BUF[t]==0x0c){ //遇到0c表示数字发完,开始发KP/KI/KD
sta=1;
continue;
}
if(USART_RX_BUF[t]=='-'){ //记录负数
fushu=1;
continue;
}
if(sta==0){
val=val*10+(USART_RX_BUF[t]-'0'); //读取每一位数字字符转化为数字
}else{
x[a++]=USART_RX_BUF[t]; //读取调节的是KP/KI/KD
}
}
if(fushu){ //负数变号
val=-val;
}
val=val/100; //改为小数
USART_RX_STA=0;
USART_RX_STA2=0;
}
if(x[1]=='P'){ //KP/KI/KD赋值
*KP=val;
}else if(x[1]=='I'){
*KI=val;
}else if(x[1]=='D'){
*KD=val;
}else{
return 0;
}
return 1;
}调用函数时,需要初始化串口1(也可以设置,下面会说)。使用函数时,传入PID三个参数的地址,成功修改会返回1,失败会返回0。
三、说明
1、修改小数点

要修改到小数点后几位,首先修改参数vvsl,比如保留小数点后3位,就把vvsl改为3;

然后代码部分修改此处即可,如果保留小数点后3位,就把100改为1000。我想大家都是能看懂的,就不过多解释了。
2、修改串口
将changePID中对应的串口1标志位改为其他串口标志位就行。
3、串口屏代码下载不进去

点击设备更改成自己屏幕的型号,然后编译一下,如果报错修改一下图片的比例。
4、波特率

使用的都是115200。串口屏的波特率可以在Program.s里修改。
四、完整工程
串口屏资源放在我主页的资源中了,大家可以自行下载。下面给出的是stm32主函数代码。
最后浅浅聊一下,串口打印的乱码都给孩子整抑郁了。。。但是看到最终的成品就觉得这一切都是值得的。可能这就是嵌入式的浪漫吧。
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include "usart2.h"
//ALIENTEK Mini STM32开发板范例代码3
//串口实验
//技术支持:www.openedv.com
//广州市星翼电子科技有限公司
int changePID(double *KP,double *KI,double *KD);
int main(void)
{
double KP=0,KI=0,KD=0;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2
uart1_init(115200); //串口初始化为9600
uart2_init(115200);
LED_Init(); //初始化与LED连接的硬件接口
while(1)
{
if(changePID(&KP,&KI,&KD)){
printf("\r\nKP=%lf KI=%lf KD=%lf",KP,KI,KD);
}
}
}
int changePID(double *KP,double *KI,double *KD)
{
double val=0;
u8 x[3];
u8 a=0;
u8 sta=0;
u8 fushu=0;
u8 t;
u8 len;
if(USART_RX_STA&0x8000)//串口1接收到数据
{
len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度
for(t=0;t<len;t++)
{
// USART2->DR=USART_RX_BUF[t];
// while((USART2->SR&0X40)==0);//等待发送结束
if(USART_RX_BUF[t]==0x0c){ //遇到0c表示数字发完,开始发KP/KI/KD
sta=1;
continue;
}
if(USART_RX_BUF[t]=='-'){ //记录负数
fushu=1;
continue;
}
if(sta==0){
val=val*10+(USART_RX_BUF[t]-'0'); //读取每一位数字字符转化为数字
}else{
x[a++]=USART_RX_BUF[t]; //读取调节的是KP/KI/KD
}
}
if(fushu){ //负数变号
val=-val;
}
val=val/100; //改为小数
USART_RX_STA=0;
USART_RX_STA2=0;
}
if(x[1]=='P'){ //KP/KI/KD赋值
*KP=val;
}else if(x[1]=='I'){
*KI=val;
}else if(x[1]=='D'){
*KD=val;
}else{
return 0;
}
return 1;
}