由线性时不变系统的可逆性,输入经过原系统之后再经过对应的逆系统可得到原输入。
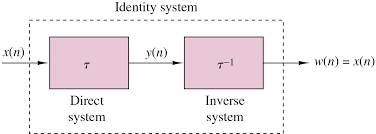
用冲击响应来描述原系统和逆系统的关系,设原系统冲击响应为, 逆系统的冲激响应为
,上图等价于如下的卷积方程:
这意味着:
上式可求出给定的
,然而在时域中求解上式通常很困难。更简单的方法是将上式转换到
域来求解逆系统,上式在
变换域可表示为:
逆系统函数为:
的所有零点都位于单位圆内(最小相位系统),这样得到的
是稳定的。
知道求
似乎很简单,但是如果
是一个很长的脉冲响应(FIR滤波器的系数),对其求逆系统会得到全极点的IIR滤波器,并且阶数也非常大。
在MIT的HRTF 数据库中,为了进行扬声器均衡,作者用到了使用DFT/IDFT进行求解扬声器脉冲响应的逆滤波器的方法。具体的步骤如下:
- 对
进行padding(补零),使用FFT计算
。补零是防止发生混叠;
- 计算
,限制幅度
- 使用IFFT计算
- 得到因果的滤波器,并加窗
matlab代码如下
[invdft, fs3] = audioread('.\data\headphones+spkr\Opti-inverse.wav');
[spkir, fs4] = audioread('.\data\headphones+spkr\Optimus.wav');
N = 16384;
Y = fft(spkir, N);
ind1 = floor(18000/44100*N);
mag = abs(Y);
ang = angle(Y);
% mag(1) = 1 / mag(1);
mag(2:ind1) = 1 ./ mag(2:ind1);
mag(ind1+1:N-ind1+1) = mag(ind1);
mag(N-ind1+2:N) = flipud(mag(2:ind1));
% mag(mag2db(mag) > 60) = db2mag(60);
Ynew1 = mag.*exp(1j*ang);
yh = fftshift(real(ifft(Ynew1)));
[~, loc] = max(yh);
yhs = yh(loc-1023:loc+1024).*hann(2048)*db2mag(-6);
figure;
plot(yhs);
title('inverse filter')
figure;
freqz(yhs,1);
title('inverse filter frequency response')
fvtool(yhs, 1, invdft,1)
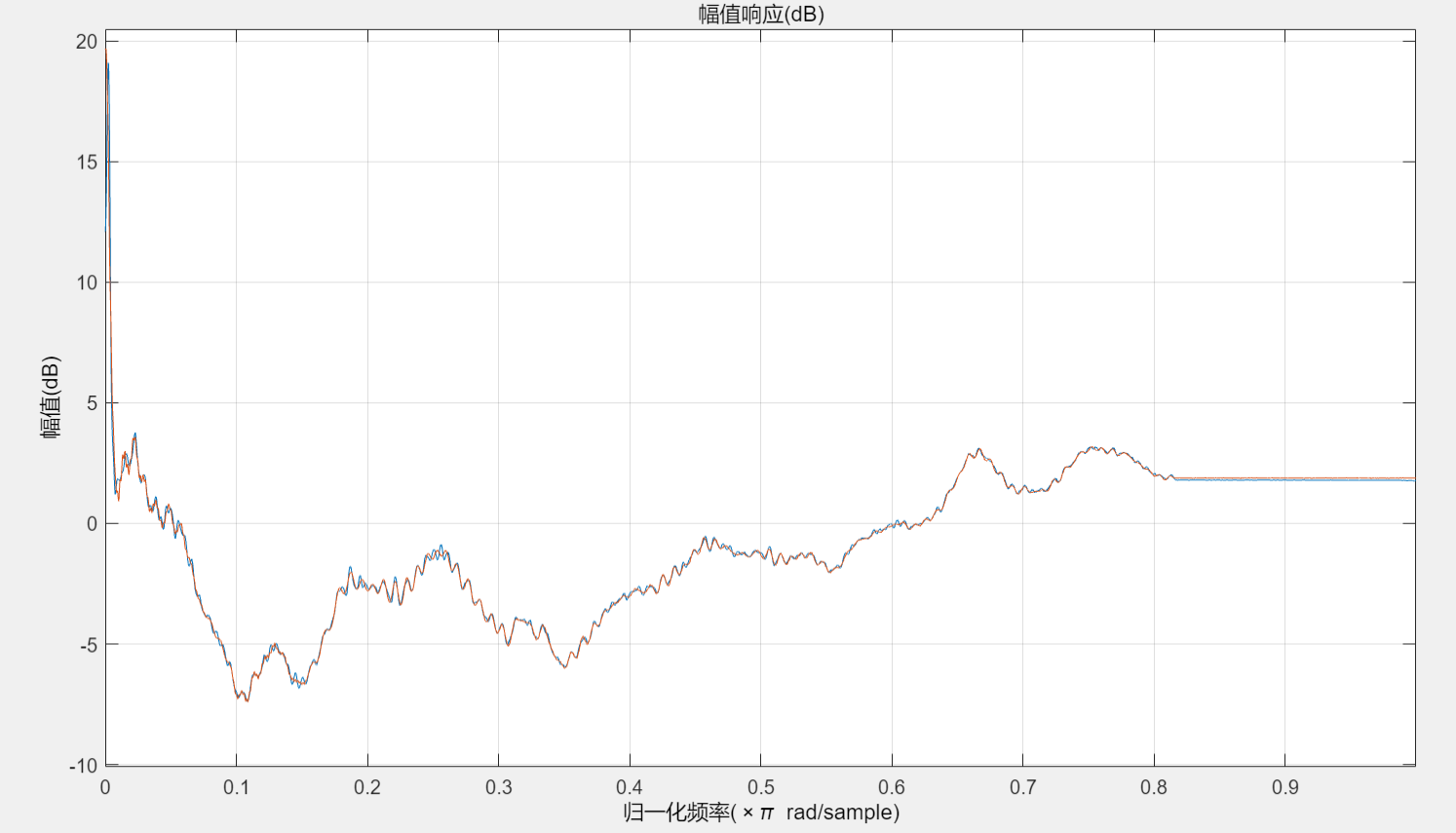
Optimus.wav是MIT HRTF数据集中的扬声器脉冲响应,长度为16383。Opti-inverse.wav是MIT数据库提供的2048点的扬声器脉冲响应的逆滤波器系数,上面的代码以Optimus.wav作为输入,求解逆滤波器。最终得到的逆滤波器和数据库提供的比较接近 ,如下图:

参考:
[1] William G. Gardner. 3-D Audio Using Loudspeakers
[2] Bill Gardner and Keith Martin. HRTF Measurements of a KEMAR Dummy-Head Microphone