1.图的广度优先搜索
(1). 定义
图的广度优先搜索(Breadth-First Search, BFS)是一种用于遍历或搜索树或图的算法。这个算法从图的某一节点(源节点)开始,探索最靠近源节点的节点,然后是一层一层地向外扩展,直到找到目标节点或遍历完整个图。
下面是广度优先搜索的基本步骤:
a. 创建一个队列,将源节点入队。
b. 对源节点执行访问,同时标记其已经被访问。
c. 当队列不为空时,循环执行以下步骤:
c.1. 从队列中取出一个节点。
c.2. 遍历该节点的所有邻居节点。如果邻居节点未被访问过,访问此节点,再将其加入队列和标记其已经被访问。
d. 算法结束。
在广度优先搜索中,所有从源节点出发,到达同一层级的节点,都会被一同处理。因此,广度优先搜索可以找到从源节点到目标节点的最短路径(如果目标节点存在的话),这里的“最短”指的是路径上边的数量最少。
在编程实现广度优先搜索时,通常会用到队列这种数据结构,因为队列的特性是先进先出(FIFO),这正好符合广度优先搜索逐层向外扩展的需求。
值得注意的是,广度优先搜索在某些情况下可能不是最优的,例如当图很大或者结构复杂时,它可能需要遍历很多节点才能找到目标节点。在这种情况下,可能需要考虑使用其他搜索算法,如深度优先搜索(DFS)或启发式搜索算法等。
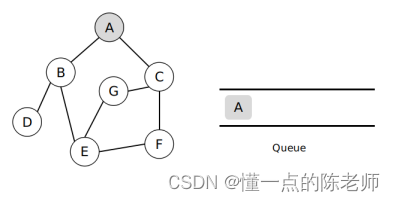
(2). 实例
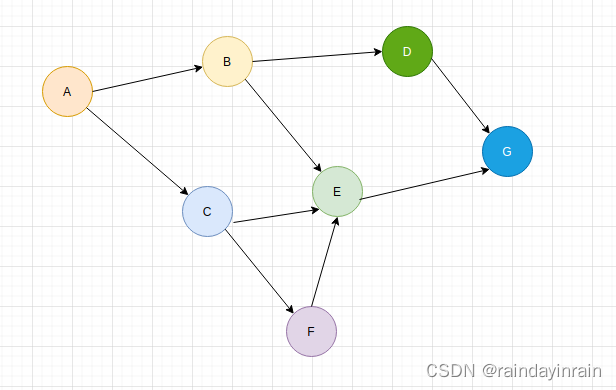
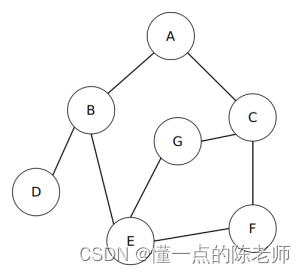
针对上述图结构,我们可以借助广度优先搜索计算并打印一条A到G的边数最少的路径.
2.图的深度优先搜索
(1). 定义
深度优先搜索(Depth-First Search,DFS)是一种用于遍历或搜索树或图的算法。这个算法会尽可能深地搜索树的分支。当节点v的所在边都已被探寻过,搜索将回溯到发现节点v的那条边的起始节点。这一过程一直进行到已发现从源节点可达的所有节点为止。如果还存在未被发现的节点,则选择其中一个作为源节点并重复以上过程,整个进程反复进行直到所有节点都被访问为止。
在图的深度优先搜索中,基本的思想是从某个顶点v开始,首先访问该顶点,然后依次从v的未被访问的邻接点出发,对图进行深度优先遍历,直至图中和v有路径相通的顶点都被访问。如果此时图中尚有顶点未被访问,则从一个未被访问的顶点出发,重新进行深度优先遍历,直到图中所有顶点均被访问过为止。
深度优先搜索的具体步骤可以总结如下:
(1). 访问顶点v。
(2). 依次从v的未被访问的邻接点出发,对图进行深度优先遍历;直至图中和v有路径相通的顶点都被访问。
若此时图中尚有顶点未被访问,则从一个未被访问的顶点出发,重新进行深度优先遍历,直到图中所有顶点均被访问过为止。需要注意的是,深度优先搜索的结果可能不唯一,因为搜索的顺序可能因不同的邻接点选择顺序而有所变化。
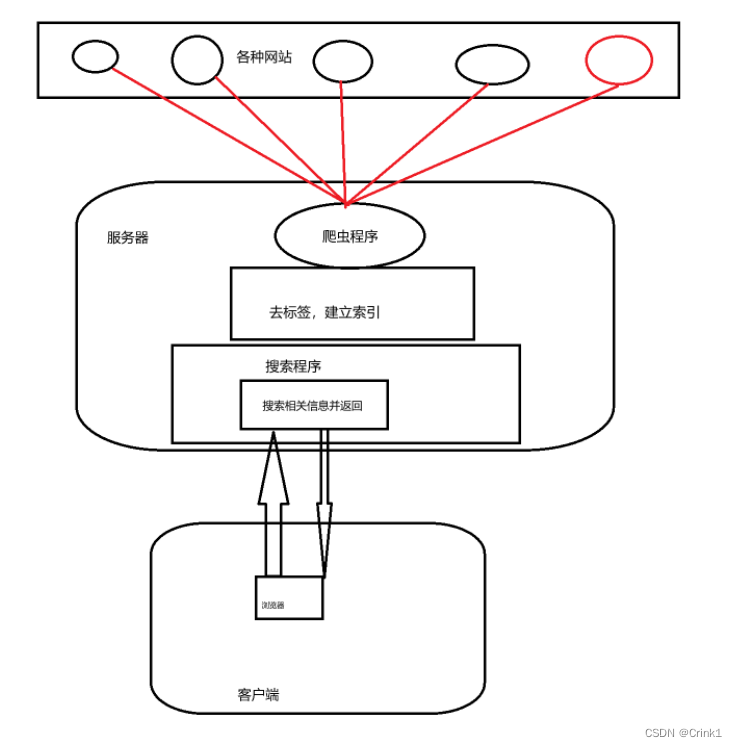
深度优先搜索在许多应用中都有重要的作用,如网络爬虫、人工智能、编译器设计等。在网络爬虫中,深度优先搜索可以帮助我们按照特定的路径去遍历网页;在人工智能中,深度优先搜索可以用于求解迷宫问题等;在编译器设计中,深度优先搜索可以用于语法分析树的构建等。
总的来说,深度优先搜索是一种强大且灵活的算法,可以处理各种复杂的图结构问题。
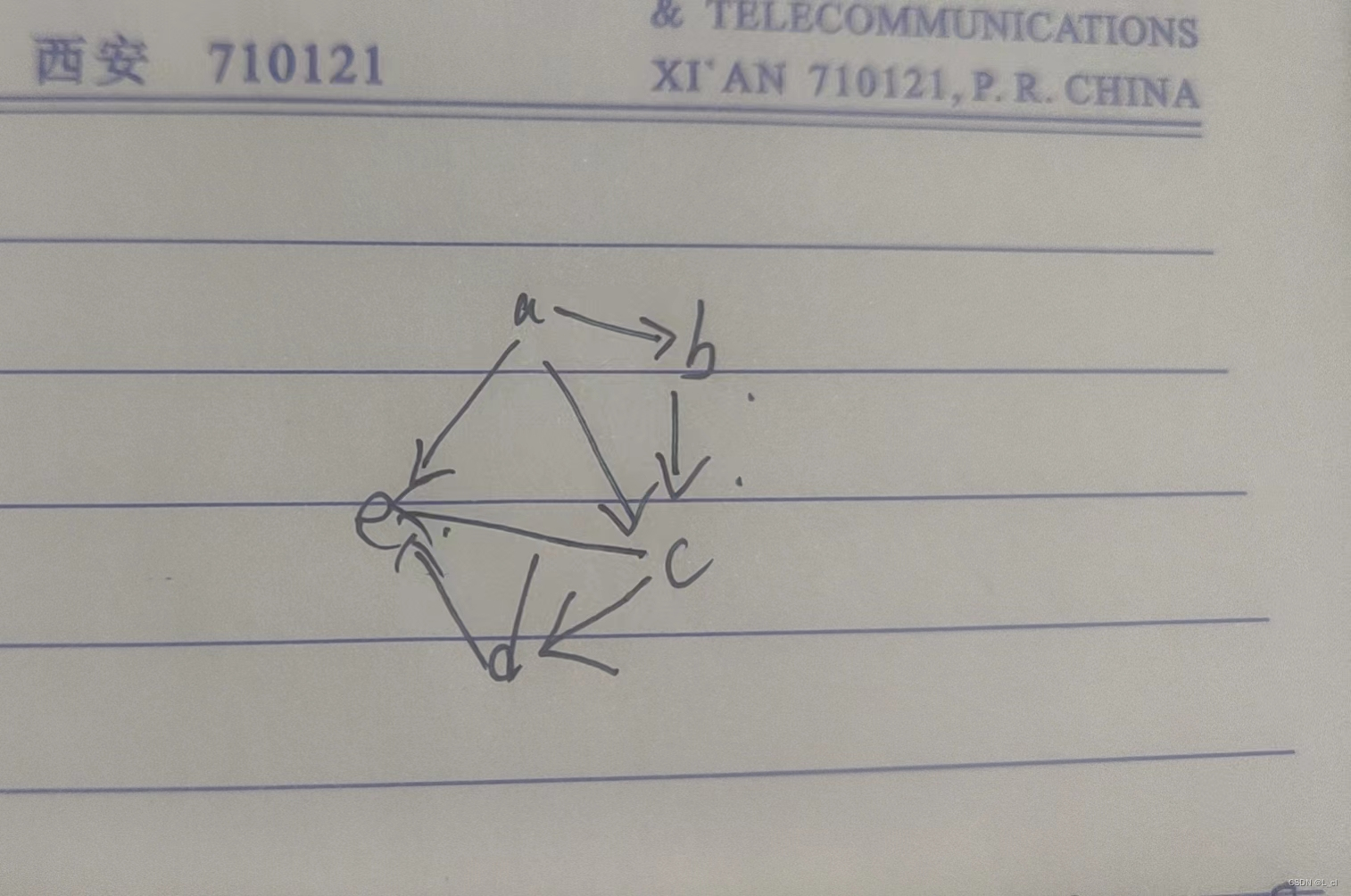
(2). 实例
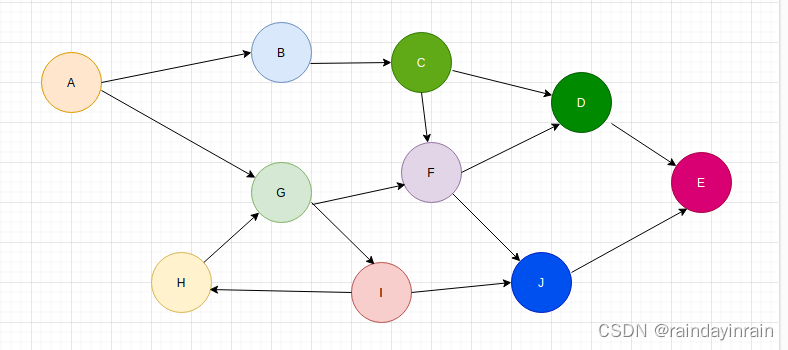
上述是一个由边和节点构成的图结构.我们可以利用深度优先搜索找到从A到E的所有可行路径.并输出其中边数最少的一条路径的变数,及路径上的节点信息.
class NodeInfo{
public:
char m_nName;
};
template<class T>
class Node{
public:
T m_nEle;
};
template<class EdgeInfo>
class Edge{
public:
bool m_bValid = false;
};
Node<NodeInfo> stNodes[10];
Edge<int> stEdges[10][10];
int ArrPath[1000][10];
int PathNum = 0;
int MinPath[10];
int MinNum = 10;
void Visit(int nCurIndex, int nEndIndex, int (&ArrIndex)[10], int nNum);
int main(){
stNodes[0].m_nEle.m_nName = 'A';
stNodes[1].m_nEle.m_nName = 'B';
stNodes[2].m_nEle.m_nName = 'C';
stNodes[3].m_nEle.m_nName = 'D';
stNodes[4].m_nEle.m_nName = 'E';
stNodes[5].m_nEle.m_nName = 'F';
stNodes[6].m_nEle.m_nName = 'G';
stNodes[7].m_nEle.m_nName = 'H';
stNodes[8].m_nEle.m_nName = 'I';
stNodes[9].m_nEle.m_nName = 'J';
stEdges[0][1].m_bValid = true;
stEdges[0][6].m_bValid = true;
stEdges[1][2].m_bValid = true;
stEdges[2][3].m_bValid = true;
stEdges[2][5].m_bValid = true;
stEdges[3][4].m_bValid = true;
stEdges[5][3].m_bValid = true;
stEdges[5][9].m_bValid = true;
stEdges[6][5].m_bValid = true;
stEdges[6][8].m_bValid = true;
stEdges[7][6].m_bValid = true;
stEdges[8][7].m_bValid = true;
stEdges[8][9].m_bValid = true;
stEdges[9][4].m_bValid = true;
// 找到从A到E的所有可能路径
int nFirstIndex = 0;
int nEndIndex = 4;
int ArrIndex[10];
int nNum = 0;
// 深度优先遍历
Visit(nFirstIndex, nEndIndex, ArrIndex, nNum);
// 打印结果
printf("min path:%d\n", MinNum);
for(int i = 0; i < MinNum; i++){
printf("%c ", stNodes[MinPath[i]].m_nEle.m_nName);
}
printf("\n");
printf("path num:%d\n", PathNum);
while(true){
printf("path index:\n");
int nIndex = 0;
scanf("%d", &nIndex);
getchar();
if(nIndex < 0){
break;
}
for(int i = 0; i < 10; i++){
printf("%c ", stNodes[ArrPath[nIndex][i]].m_nEle.m_nName);
}
printf("\n");
}
return 0;
}
// 从nCurIndex开始到nEndIndex的所有路径
void Visit(int nCurIndex, int nEndIndex, int (&ArrIndex)[10], int nNum){
// 访问当前节点
//stNodes[nCurIndex].m_nEle.m_bVisit = true;
ArrIndex[nNum] = nCurIndex;
nNum++;
if(nCurIndex == nEndIndex){
// 记录
for(int i = 0; i < nNum; i++){
ArrPath[PathNum][i] = ArrIndex[i];
}
PathNum++;
// 比较&更新
if(nNum < MinNum){
MinNum = nNum;
for(int i = 0; i < nNum; i++){
MinPath[i] = ArrIndex[i];
}
}
return;
}
// 在当前阶段基础上,继续走向每个分支
for(int i = 0; i < 10; i++){
int nOldNum = nNum;
// 从当前沿着此分支继续走下去
if(stEdges[nCurIndex][i].m_bValid){
// 剪分支
// 待访问节点不能已经出现在累计的访问路径上.将环路排除在结果外.
int k = 0;
for(; k < nNum; k++){
if(ArrIndex[k] == i){
break;
}
}
if(k >= nNum){
Visit(i, nEndIndex, ArrIndex, nNum);
}
}
// 分支走完需要撤销影响.以便继续从当前沿着后续分支继续走.防止数据被污染.走的过程中需要记录和更新的内容已经记录下来了.
nNum = nOldNum;
}
}
上述算法是一个典型的深度优先,递归,动态规划性质的算法.
此类算法典型特征:
(1). 递归算法.
(2). 参数部分提供当前阶段,截止阶段信息(方便知道何时停止后续递归),累计到当前的阶段性信息.
(3). 访问当前设计对阶段性信息记录,及到达截止阶段时比较&更新全局信息.
(4). 从当前节点继续走向可行分支.
要走向的分支得存在.
需要进行剪枝分析.具体到上述,因为我们要求解最短路径,所以,需剪掉出现环路的分支.
(5). 走完一个分支后,需防止数据被污染.要分析从上一分支走的过程中那些数据被污染了,并判断是否需恢复.具体到上述,我们维护的阶段性信息被污染了.重新走后续分支时,我们需将其恢复到走首个分支前的状态.因为上述我们需借助阶段性信息来记录从起点到终点的路径信息.