Matlab 双目相机标定(内置函数)
- 开发
- 17
-
一、简介
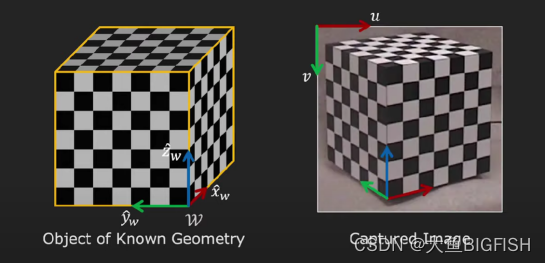
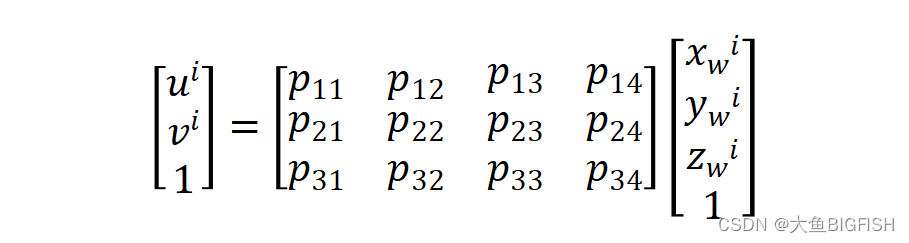
相机标定的目的就是要找到从世界坐标转换为图像坐标所用到的投影P矩阵各个系数(即相机的内参与外参)。具体过程如下所述:
1、首先我们需要获取一个已知图形的图像(这里我们使用MATLAB所提供的数据)。
2、找到同名像点(匹配点),这里主要是探测黑白格子之间的角点。

3、构建方程。
原文地址:https://blog.csdn.net/dayuhaitang1/article/details/136792914
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。
本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:https://www.suanlizi.com/kf/1771250498331086848.html
如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!





























![[GPT概念-02] — 预训练、微调和不同的用例应用](https://img-blog.csdnimg.cn/img_convert/7466d3802c6a31cfd2933b43eff3b0ea.png)