自从去年被芯片企业裁员,然后加入吉利集团车企亿咖通之后,一直在从事车载摄像头驱动这方面的工作,在点亮了几款摄像头以后,深有感触,做一个目前工作的认识总结,也给行业从业者一个观察切入的视角。
现状
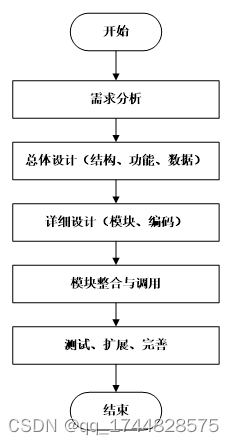
目前车企平台的软件开发是一个开放自由的状态,各部分组件总体来说是一个没有任何标准的状态,虽说有autosar 等规范定义,但是这些对mcu 以外的各部分软件组件来说基本没有什么约束,都是车企内部调研行业之后,根据车辆定义和需求自行其是。
在这个基础上的摄像头软件开发也是处于这种状态,由各个车企内部自由定义,不像手机等平台有成熟的系统定义,分层架构,模块设计,开发工具配套,人员分工等等。都是需要自行组织定义,没有明显的边界,通常是一个人负责一个项目上所有的摄像头的驱动开发,然后交给后续的上层的算法应用去了。
目前车辆上的摄像头有两类,一类是接到一个中间部件上,通过这个中间部件转接数据流到车机上。比如摄像头有接入到adcu上,adcu 内部有解串器,将摄像头数据流解析出来,一路实现内部算法应用,如解析运动图像,实现人物识别,车辆避让等应用场景,同时再复制一路数据流出来,重新打包,经过内部串行器封包输出到外部。然后车机接收这一路,实现另外的算法应用设计。 这部分就是需要车企摄像头驱动来开发的工作了。
另外一类是,不同的摄像头直接接入到车机上,不需要中间部件的转接。这类摄像头有dms,dvr,srv 环视等等。
对比不同
架构
针对以上两类的摄像头&#


























![BUU [MRCTF2020]套娃](https://img-blog.csdnimg.cn/img_convert/98480b49cebbce4191102671ab736d0a.png)