1、内容简介
略
64-可以交流、咨询、答疑
2、内容说明
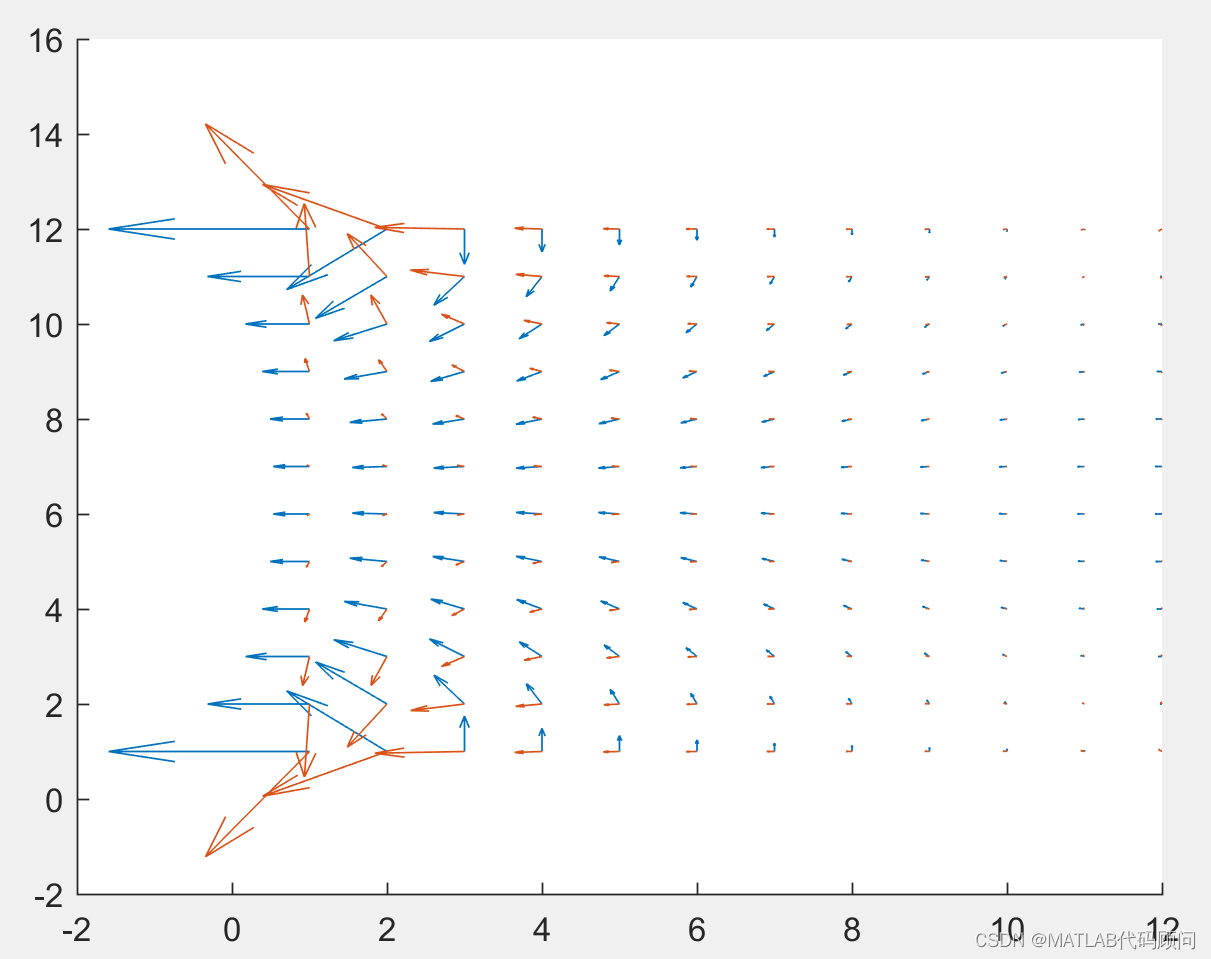
matlab喷车行走轨迹绘制
在喷涂过程中,喷枪从被喷涂的区域开始行走,设其中M和N为小车左边驱动模块的左右轮,I和J为小车右边驱动模块的左右轮,两个驱动模块之间的距离为L,左右轮之间的距离为H,小车轮子的半径为R。其中L=384mm,H=122mm,R=17.5mm。
设小车M轮的速度为Vm,N轮的速度为Vn,I轮的速度为Vi,J轮的速度为Vj;M轮到N轮的中点为O1,其点速度为VO1,角速度为WO1,I轮到J轮的中点为O2,其点速度为VO2,角速度为WO2。
当喷涂小车从喷涂区域右端开始作直线行走时,喷涂小车的两个驱动模块的四个轮子的速度是相等的,当小车开始进入转弯处时,需要通过两个驱动模块的相互协调来完成。
首先,我们将在转弯时的小车运动状态分为三个阶段,如图一。
图1 喷枪小车运行的三个阶段
第一阶段喷涂小车运行如图二。
图2 喷凃小车运行的第一阶段
喷涂小车在转弯第一阶段时,小车的左边驱动模块开始进入转弯,而小车的右边驱动模块仍然处于直线运行阶段直到开始转弯,此时
O1点的速度
设左边驱动模块的运动方向与X轴夹角为α,小车的转弯半径为r,从左边驱动模块开始转弯计时,经过时间t1,该驱动模块转动的角度为α,则喷涂小车I轮走过的弧长为
,J轮走过的弧长为
。
则I轮和J轮所走过的弧长的差值为
i×t1-Vj×t1 (2)
通过推到结果可以看出,α与时间t1成线性关系。
在△O2CA中,
,将公式进行化简得到
由于喷涂小车走过的是一个四分之一圆弧,则0
α
90°,根据上式公式可得:rmin=
综合以上等式,可以得到喷涂小车转弯处的最小半径为rmin=271.57mm。
由公式(1)可知,O1点的角速度为:
(3)
由于喷涂小车转动时,小车上个点的角速度是相等的,则O2点的角速度为:
(4)
设t1时刻两个驱动模块的瞬时运动半径为
,则O2点的瞬时速度为
(5)
在△AO1O2中,∠O1AO2=α,在△ACO2中,
,则
将其带入公式(5)则得到:
(6)
由于喷涂小车右边的驱动模块做直线运动,可得出I和J轮的速度为:
(7)
喷涂小车运行第二阶段如图三。
图3 喷涂小车运行第二阶段
当喷涂小车第一阶段结束后,进入第二阶段。由于喷涂小车行走时最小的半径为271.57mm,则其弦长为
mm。因为两个驱动模块之间的距离为384mm,其小于384.1mm,则不存在左边的驱动模块转弯结束后,右边的驱动模块还没开始转弯的情况。因此,第二个阶段为右边的驱动模块开始转弯,而左边的驱动模块依旧处于转弯状态。
设,在t2时刻,两个驱动模块的瞬时运动半径为其最小半径r”,由公式(3)~(5)可以得到O2点的速度为
(8)由于
,则根据公式(8)可知,Vn=Ve,Vi=Vj。
喷涂小车运行第三阶段如图四。
图4 喷涂小车运行第三阶段
当喷涂小车转弯第二阶段接手之后,进入转弯第三阶段,即左边的驱动模块开始走直线运动,右边的驱动模块依旧在进行转弯运动。
设,经过t3时刻,右边的驱动模块转过的角度与x轴所成角度为β,I轮走过的弧长长度为
,J轮走过的弧长长度为
,则I轮与J轮走过的弧长长度之差为
(9)
则,
,则β与时间t3成线性关系。
设t3时刻两个驱动模块的瞬时运动半径为r’”,在△AO1O2中,
,则在△ACO1中,
(10)
此时,I轮的速度为Vi,J轮的速度为Vj,则O2点的速度为
(11)
右边的驱动模块做圆周运动,则O2点的角速度为
(12)
两个驱动模块组合成了刚体运动,由于刚体运动时角速度处处相等,则O1点的角速度为
,则O1点的瞬时速度为
,整理得:
此时,左边的驱动模块做直线运动,可以知道M,N轮的速度为Vm=Vn=
。
M轮的瞬时速度 |
N轮的瞬时速度 |
I轮的瞬时速度 |
J轮的瞬时速度 |
|
第一阶段 |
Vm |
Vn |
|
|
第二阶段 |
Vm |
Vn |
Vi |
Vj |
第三阶段 |
|
|
Vi |
Vj |


喷涂小车各转弯过程中轮子的瞬时速度
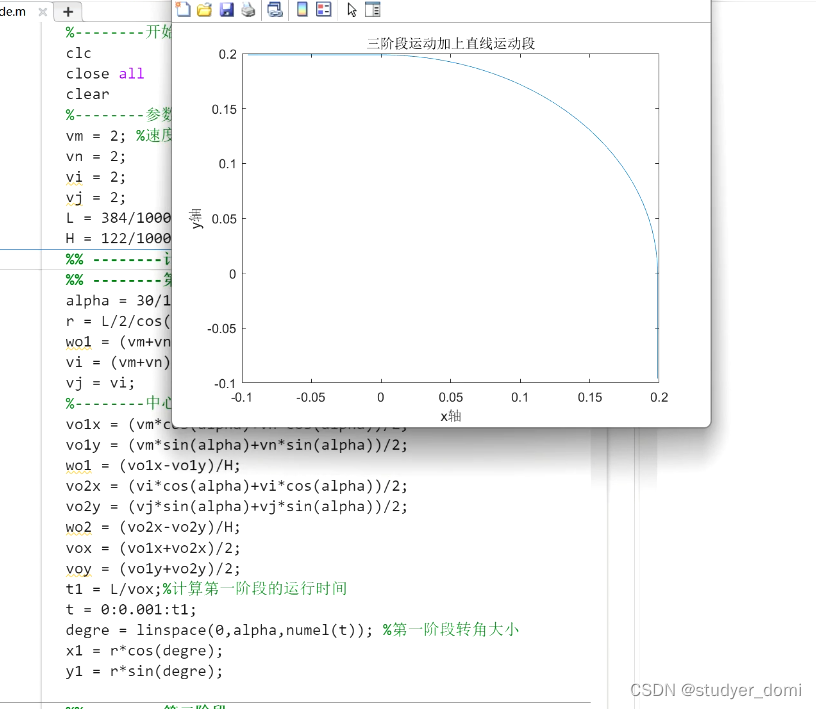
3、仿真分析
4、参考论文
略