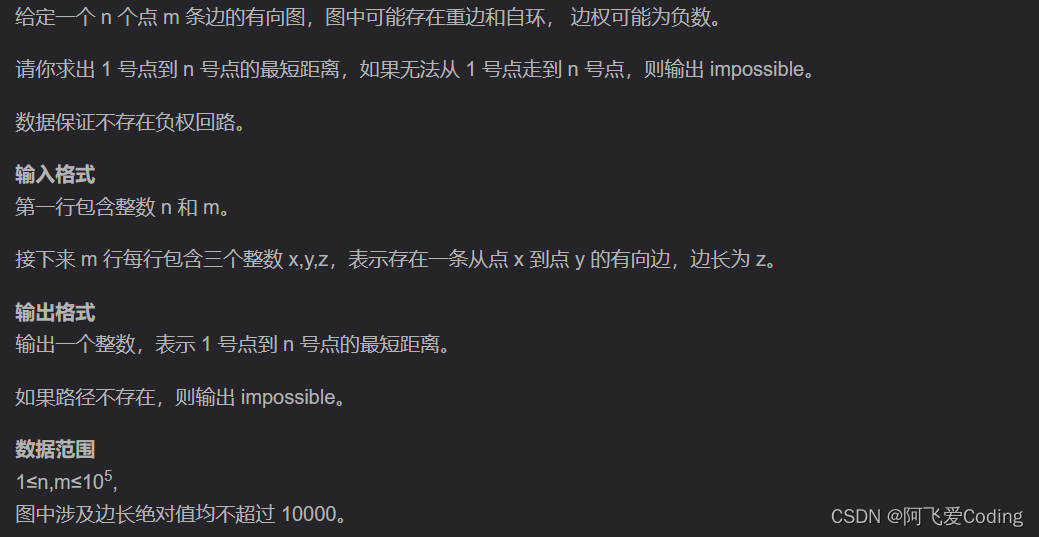
给定一张 N个点(编号 1,2…N),M条边的有向图,求从起点 S到终点 T 的第 K 短路的长度,路径允许重复经过点或边。
注意: 每条最短路中至少要包含一条边。
输入格式
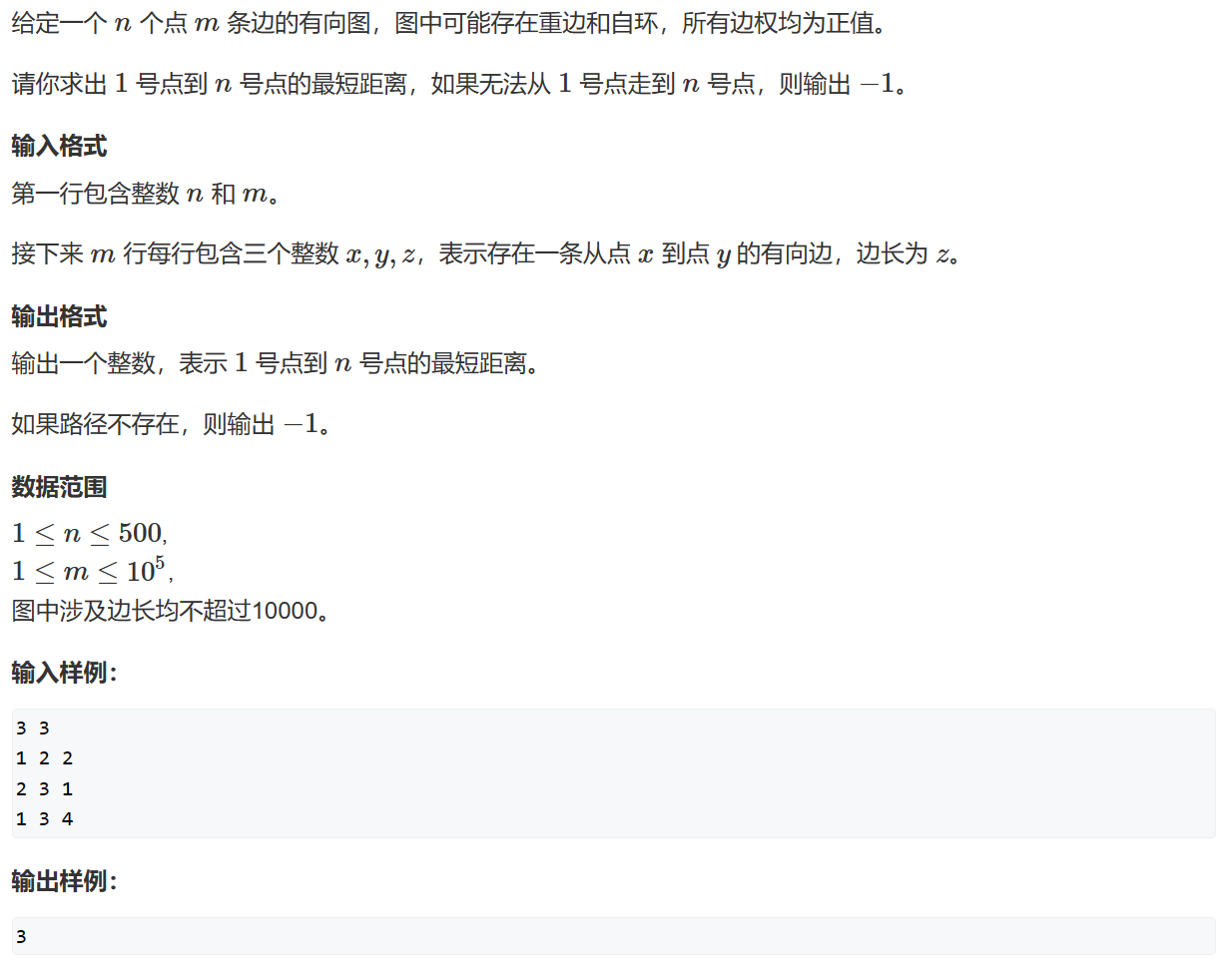
第一行包含两个整数 N 和 M。
接下来 M 行,每行包含三个整数 A,B, 和 L,表示点 A 与点 B 之间存在有向边,且边长为 L。
最后一行包含三个整数 S,T 和 K,分别表示起点 S,终点 T 和第 K 短路。
输出格式
输出占一行,包含一个整数,表示第 K 短路的长度,如果第 K 短路不存在,则输出 −1−1。
数据范围
1≤S,T≤N≤1000,
0≤M≤10^4,
1≤K≤1000,
1≤L≤100。
输入样例:
2 2
1 2 5
2 1 4
1 2 2输出样例:
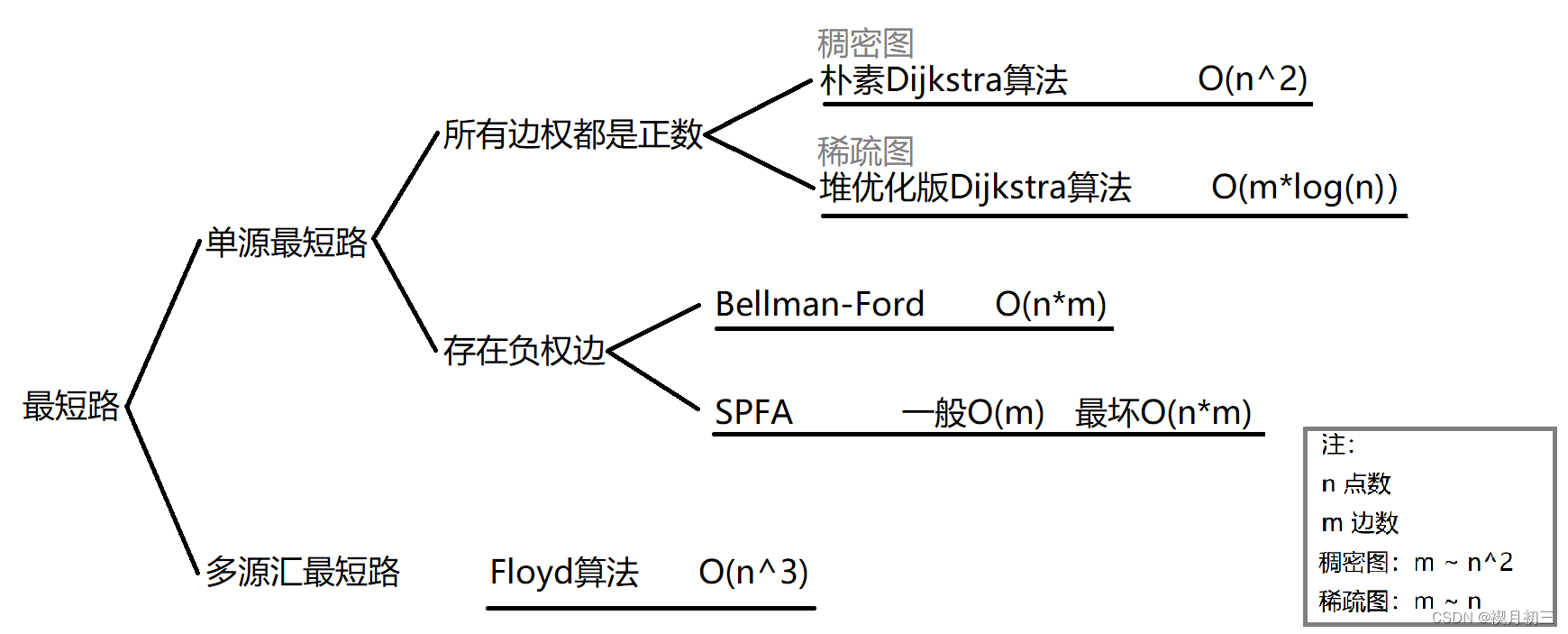
14A*算法核心思想: 反向计算最短路到终点的估计值
注意:当起点和终点一样时,K++
f [x]=h [x] + g [x] (起点到终点的估计距离 = 起点到x的真实距离 + x到终点的估计距离)
x到终点的估计距离我们可以通过Dijkstra算法逆向求出终点到各点的最短距离:
void Dijkstra()
{
priority_queue<PII,vector<PII>,greater<PII>> heap;
heap.push({0,T});
memset(dist,0x3f,sizeof dist);
dist[T]=0;
while(heap.size())
{
auto it=heap.top();heap.pop();
int distance=it.x,t=it.y;
if(st[t])continue;
st[t]=true;
for(int i=rh[t];i!=-1;i=ne[i])
{
int j=e[i];
if(dist[j]>distance+w[i])
{
dist[j]=distance+w[i];
heap.push({dist[j],j});
}
}
}
}接着就是从起点开始计算到终点的距离,我们需要将起点到终点距离小的优先出队,同一个点第几次出队就是第几短的路,那么就需要用到小顶堆了。
int star()
{
if(dist[S]==0x3f3f3f3f) return -1;//若终点无法到达起点则返回-1
priority_queue<PIII,vector<PIII> ,greater<PIII>> heap;
heap.push({dist[S],{0,S}});
while(heap.size())
{
auto it=heap.top();heap.pop();
int distance=it.y.x,t=it.y.y;
cnt[t]++;
if(cnt[T]==K) return distance;//若终点第K次出队说明是第K短路
for(int i=h[t];i!=-1;i=ne[i])
{
int j=e[i];
if(cnt[j]<K)
{
//起点到j的距离+j到终点的估计距离
heap.push({distance+w[i]+dist[j],{distance+w[i],j}});
}
}
}
return -1;
}完整代码:
#include<iostream>
#include<queue>
#include<vector>
#include<cstring>
using namespace std;
#define x first
#define y second
typedef pair<int,int> PII;
typedef pair<int,PII> PIII;
const int N=2e4+5;
int h[N],rh[N],e[N],ne[N],w[N],idx;
int dist[N],cnt[N],n,m,S,T,K;
bool st[N];
void add(int h[],int a,int b,int c)
{
e[idx]=b,ne[idx]=h[a],w[idx]=c,h[a]=idx++;
}
void Dijkstra()
{
priority_queue<PII,vector<PII>,greater<PII>> heap;
heap.push({0,T});
memset(dist,0x3f,sizeof dist);
dist[T]=0;
while(heap.size())
{
auto it=heap.top();heap.pop();
int distance=it.x,t=it.y;
if(st[t])continue;
st[t]=true;
for(int i=rh[t];i!=-1;i=ne[i])
{
int j=e[i];
if(dist[j]>distance+w[i])
{
dist[j]=distance+w[i];
heap.push({dist[j],j});
}
}
}
}
int star()
{
if(dist[S]==0x3f3f3f3f) return -1;
priority_queue<PIII,vector<PIII> ,greater<PIII>> heap;
heap.push({dist[S],{0,S}});
while(heap.size())
{
auto it=heap.top();heap.pop();
int distance=it.y.x,t=it.y.y;
cnt[t]++;
if(cnt[T]==K) return distance;
for(int i=h[t];i!=-1;i=ne[i])
{
int j=e[i];
if(cnt[j]<K)
{
heap.push({distance+w[i]+dist[j],{distance+w[i],j}});
}
}
}
return -1;
}
int main()
{
cin>>n>>m;
memset(h,-1,sizeof h);
memset(rh,-1,sizeof rh);
while(m--)
{
int a,b,c;cin>>a>>b>>c;
add(h,a,b,c);
add(rh,b,a,c);
}
cin>>S>>T>>K;
if(S==T) K++;
Dijkstra();
cout<<star();
return 0;
}