相机内参标定
更多内容,请关注:
github:https://github.com/gotonote/Autopilot-Notes.git
相机内参标定主要是为了获取相机本身的性质参数,包括相机的焦距,光心以及畸变参数等。
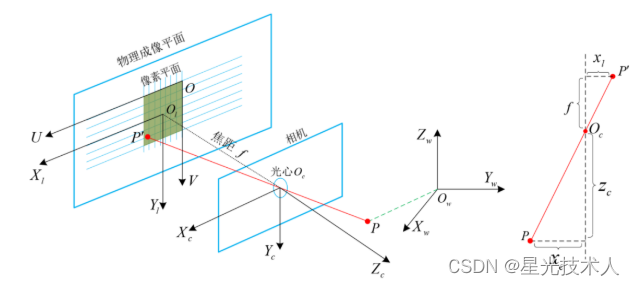
内参的物理意义与相机模型强相关,常用的相机成像模型为小孔模型,等效焦距与光心用数学可表示为一个矩阵
[ f x 0 c x 0 f y c y 0 0 1 ] \left[ \begin{matrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \\ \end{matrix} \right] fx000fy0cxcy1
其中 f x f_x fx、 f y f_y fy 是等效焦距, c x {c_x} cx、 c y {c_y} cy 是光心。
畸变的产生,是由于相机本身不能精确地按照理想的成像模型进行透视投影,即物点在实际的相机成像平面上生成的像与理想成像之间存在一定偏差,这个偏差就是相机畸变造成的。以常见的小孔成像模型为例,畸变误差主要是径向畸变误差(k1、k2、k3)和切向畸变误差(p1、p2)。
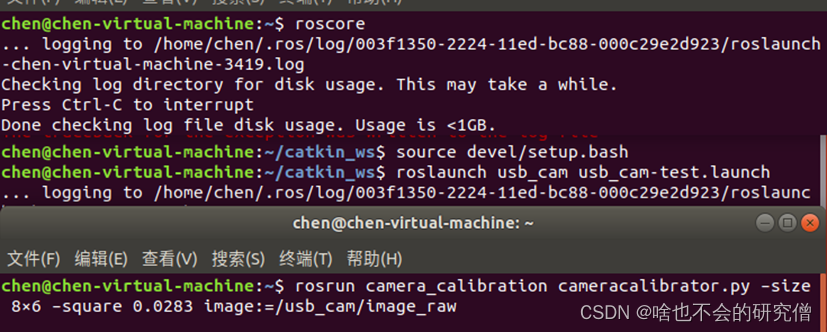
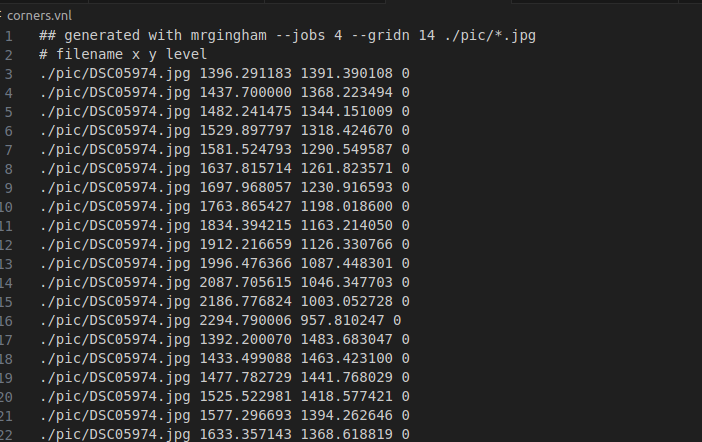
目前业界常用的相机标定方法是张正友方法, 通过多种位姿摆放的标定板,提取棋盘格角点,计算出相机的内参。