×
亲?你还没登陆呢 !
立即登录
×
搜索一下可能来得更快
搜索
{{ date }}
{{ time }}
博客
开发
推荐
xml
txt
html
标签
登录
博客
开发
推荐
ORB-SLAM PnP求解
2024-02-17 03:20:01
开发
27
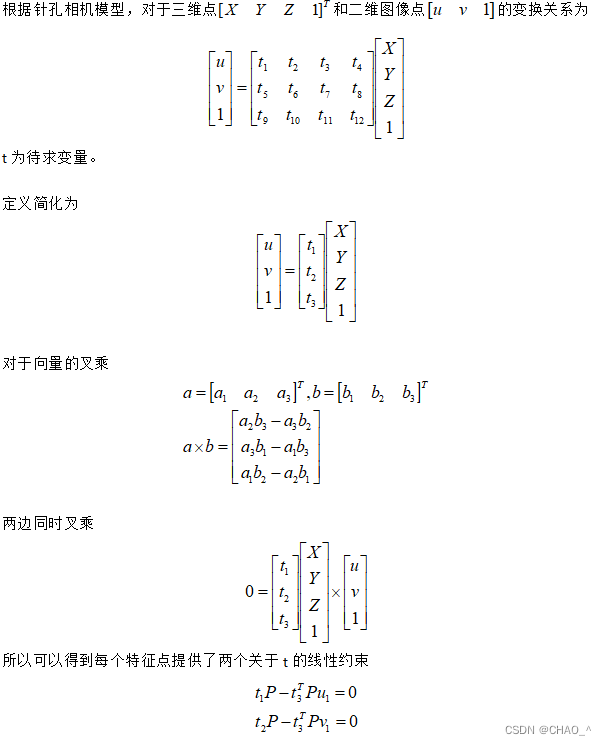
PnP解决的问题
输入:世界坐标系下的n个3D点坐标以及与之对应的 2D 像点坐标、相机内参K。
输出:恢复影像的位姿R和t。
原文地址:https://blog.csdn.net/jinzhichaoshuiping/article/details/136130803 本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。 本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若转载,请注明出处:https://www.suanlizi.com/kf/1758571952995438592.html 如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!
阅读全部
相关推荐
ORB
-SLAM PnP
求解
2024-02-17 03:20:01
28
阅读
OR
-Tools
求解
器(CBC(Coin-
or
branch and cut))日志解度
2024-02-17 03:20:01
8
阅读
OR
-Tools的CP-SAT
求解
器常用参数设置与说明
2024-02-17 03:20:01
33
阅读
行列式
求解
2024-02-17 03:20:01
14
阅读
ORB
SLAM2 编译
2024-02-17 03:20:01
39
阅读
ORB
-SLAM 论文阅读
2024-02-17 03:20:01
28
阅读
【EXCEL】规划
求解
2024-02-17 03:20:01
44
阅读
质数的
求解
方法
2024-02-17 03:20:01
45
阅读
代码
求解
方程
2024-02-17 03:20:01
43
阅读
迷宫问题
求解
2024-02-17 03:20:01
45
阅读
最近更新
MySQL 存储引擎
2024-02-17 03:20:01
30
阅读
【系统架构设计师】三、数据库系统(数据库基础|关系代数|范式)
2024-02-17 03:20:01
21
阅读
RK3588/算能/Nvidia智能盒子:加速山西铝业智能化转型,保障矿业皮带传输安全稳定运行
2024-02-17 03:20:01
22
阅读
TCP协议是安全的吗?
2024-02-17 03:20:01
19
阅读
themleaf 页面弹层取值
2024-02-17 03:20:01
25
阅读
【启明智显产品分享】Model4 工业级HMI芯片详解(三):高安全、防抄板
2024-02-17 03:20:01
23
阅读
mysql数据库中触发器的使用
2024-02-17 03:20:01
18
阅读
yolov9-pytorch 深度学习目标检测算法模型
2024-02-17 03:20:01
19
阅读
访问网络 测试没有问题,正式有问题
2024-02-17 03:20:01
19
阅读
Mac 安装HomeBrew(亲测成功)
2024-02-17 03:20:01
21
阅读
可解释机器学习之SHAP方法
2024-02-17 03:20:01
22
阅读
阿里云服务器执行yum,一直下载docker-ce-stable失败
2024-02-17 03:20:01
19
阅读
【Python教程】压缩PDF文件大小
2024-02-17 03:20:01
20
阅读
Hbuilder无线连接手机
2024-02-17 03:20:01
22
阅读
Codeforces Round 953 (Div. 2 ABCDEF题) 视频讲解
2024-02-17 03:20:01
22
阅读
生产看板管理系统内容有哪些?
2024-02-17 03:20:01
22
阅读
vue修改node_modules打补丁步骤和注意事项_node_modules 打补丁
2024-02-17 03:20:01
20
阅读
通过文章id递归查询所有评论(xml)
2024-02-17 03:20:01
20
阅读
npm语义化版本和版本运算符
2024-02-17 03:20:01
21
阅读
多线程与高并发- Synchronized锁
2024-02-17 03:20:01
21
阅读
Elasticsearch docker 安装及基本用法
2024-02-17 03:20:01
22
阅读
热门阅读
DDR简单了解
2024-02-17 03:20:01
25
阅读
linux系统zabbix监控配置电话告警
2024-02-17 03:20:01
26
阅读
开源软件的影响力
2024-02-17 03:20:01
22
阅读
机器学习之监督学习和非监督学习
2024-02-17 03:20:01
22
阅读
SpringCloud-Hystrix:服务熔断与服务降级
2024-02-17 03:20:01
23
阅读
springboot742餐厅点餐系统
2024-02-17 03:20:01
26
阅读
专业140+总分400+华中科技大学824信号与系统考研经验华科华中大电子信息与通信工程,真题,大纲,参考书。
2024-02-17 03:20:01
29
阅读
洛谷 P2580 于是他错误的点名开始了
2024-02-17 03:20:01
27
阅读
【数据库_MySQL】MySQL彻底卸载
2024-02-17 03:20:01
30
阅读
【智能家居入门4】(FreeRTOS、MQTT服务器、MQTT协议、微信小程序)
2024-02-17 03:20:01
27
阅读
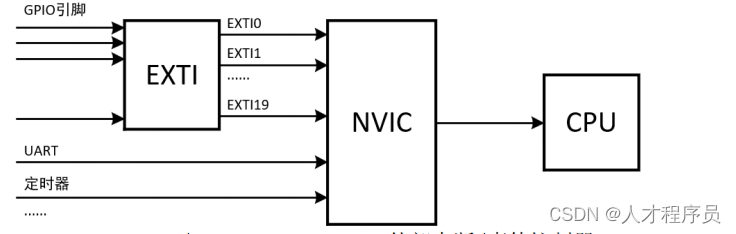
【STM32 CubeMX】STM32中断体系结构
2024-02-17 03:20:01
27
阅读
Python面向对象学习小记——类&对象
2024-02-17 03:20:01
28
阅读
各类有关于花卉的深度学习数据集
2024-02-17 03:20:01
20
阅读
《合成孔径雷达成像算法与实现》Figure6.18
2024-02-17 03:20:01
25
阅读
Python在生物信息学中的应用:捕获所有异常
2024-02-17 03:20:01
25
阅读
MQL语言图表事件详解
2024-02-17 03:20:01
29
阅读
bat 定时收缩sqlserver2012
2024-02-17 03:20:01
27
阅读
冒泡排序,判断回文,以及12-24小时制
2024-02-17 03:20:01
30
阅读
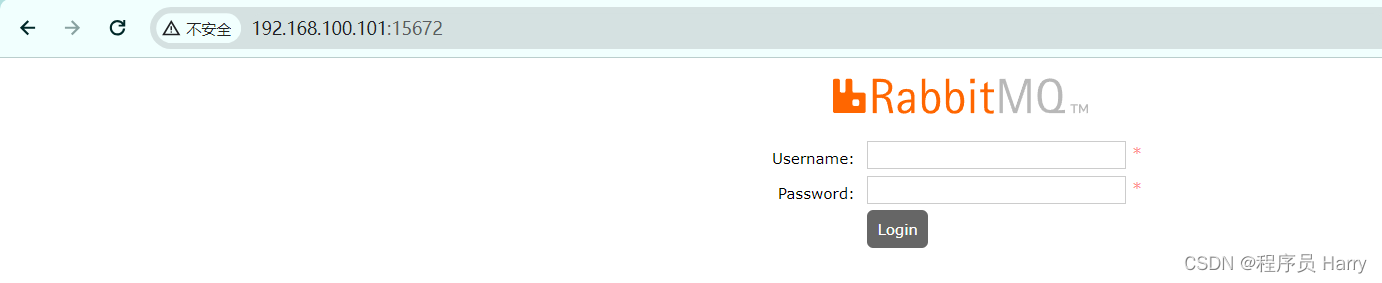
Docker安装RabbitMQ
2024-02-17 03:20:01
20
阅读
CTF攻防比赛真题详解
2024-02-17 03:20:01
30
阅读
C++:迭代器的封装思想
2024-02-17 03:20:01
25
阅读
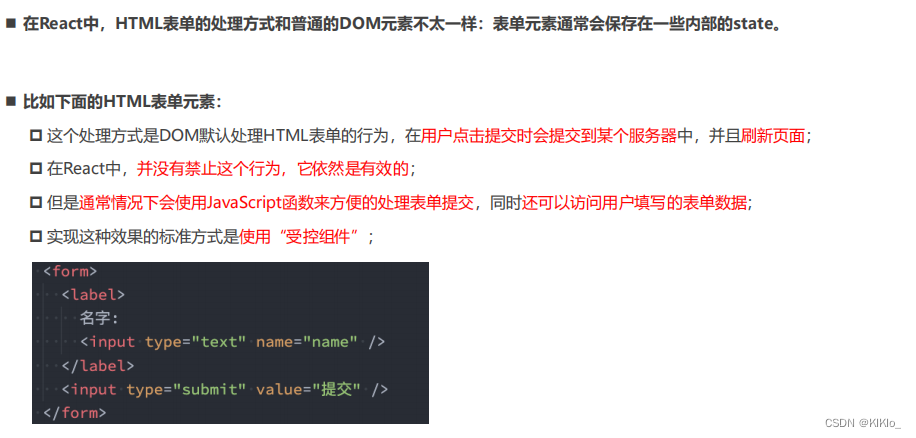
react【三】受控组件/高阶组件/portals/fragment/严格模式/动画
2024-02-17 03:20:01
27
阅读
【LeetCode】135. 分发糖果(困难)——代码随想录算法训练营Day33
2024-02-17 03:20:01
31
阅读
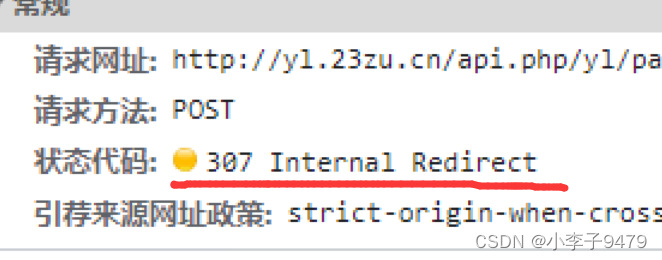
小程序或者浏览器chrome访问的时候出现307 interval redicrect内部http自动跳转到https产生的原理分析及解决方案
2024-02-17 03:20:01
30
阅读
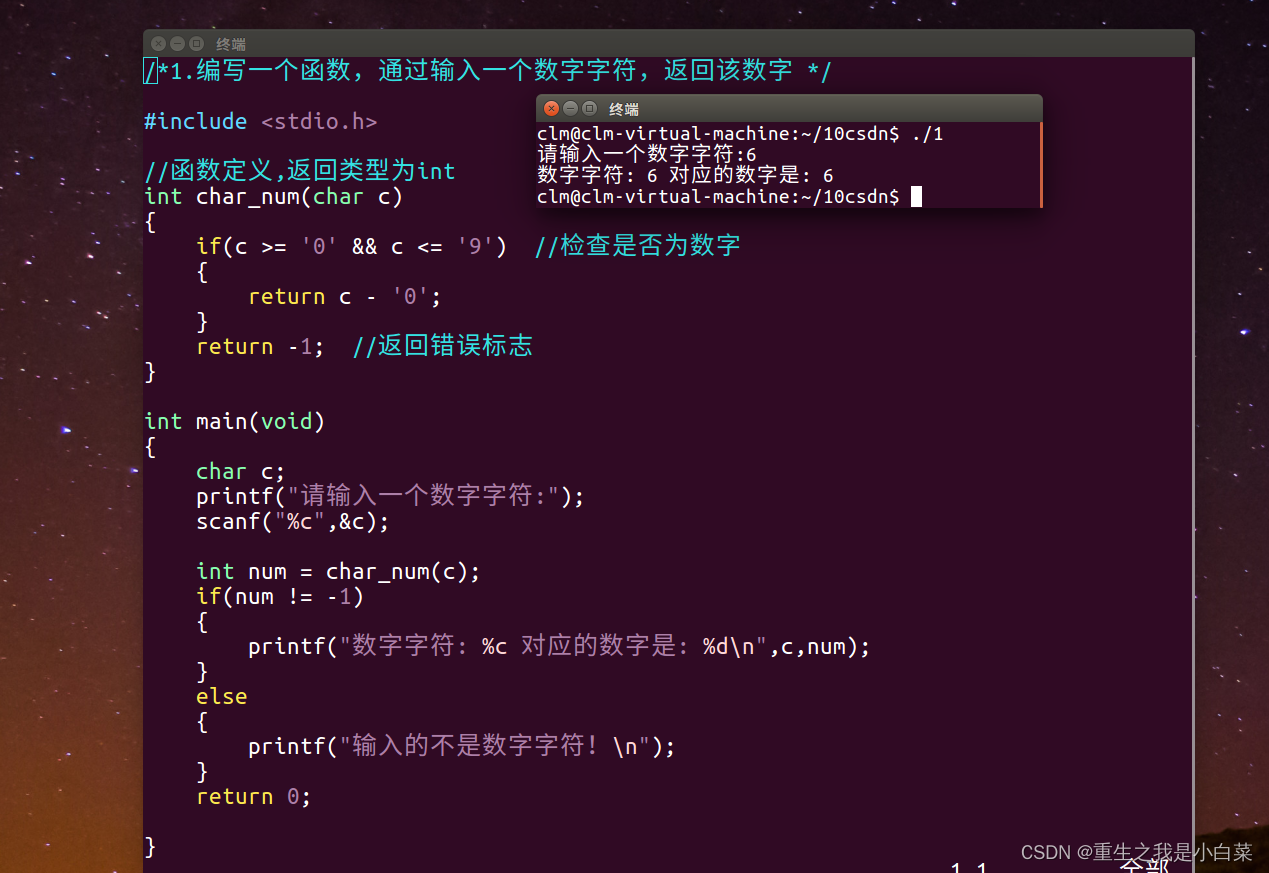
C语言—函数
2024-02-17 03:20:01
26
阅读
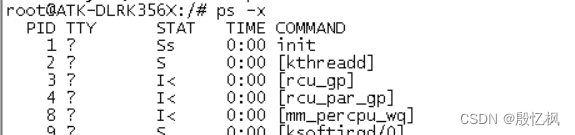
RK3568笔记十五:触摸屏测试
2024-02-17 03:20:01
34
阅读
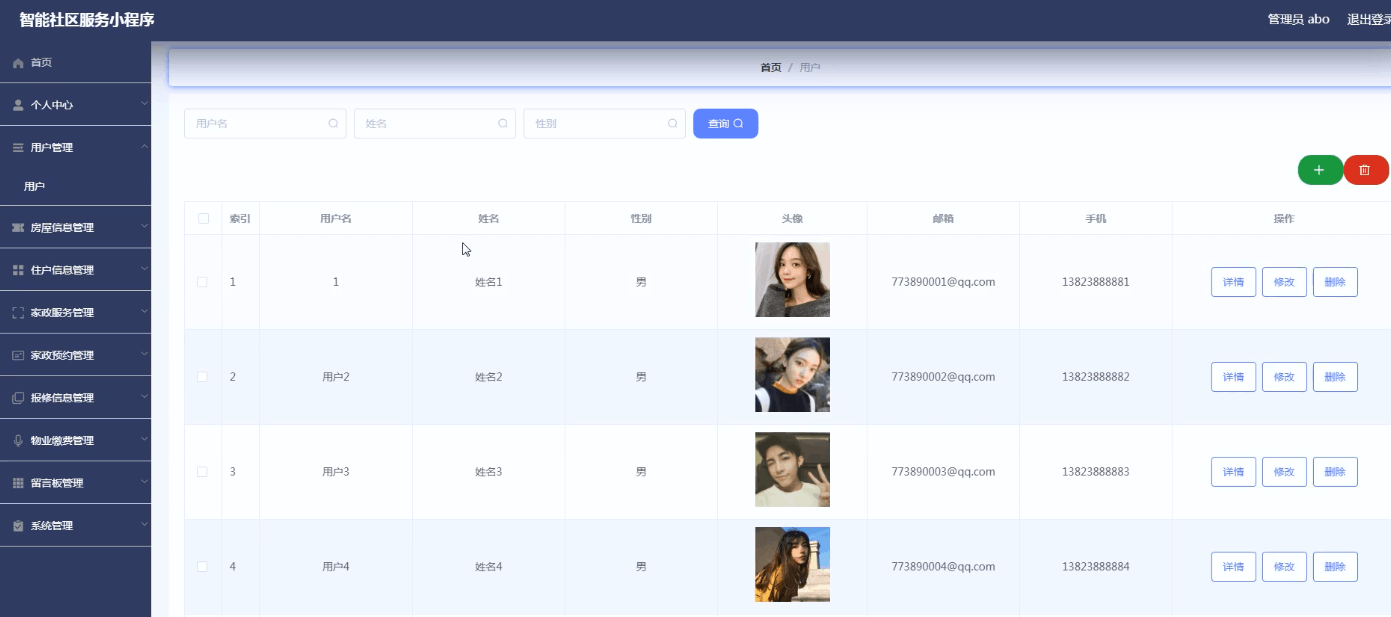
基于微信小程序的智能社区服务小程序,附源码
2024-02-17 03:20:01
36
阅读
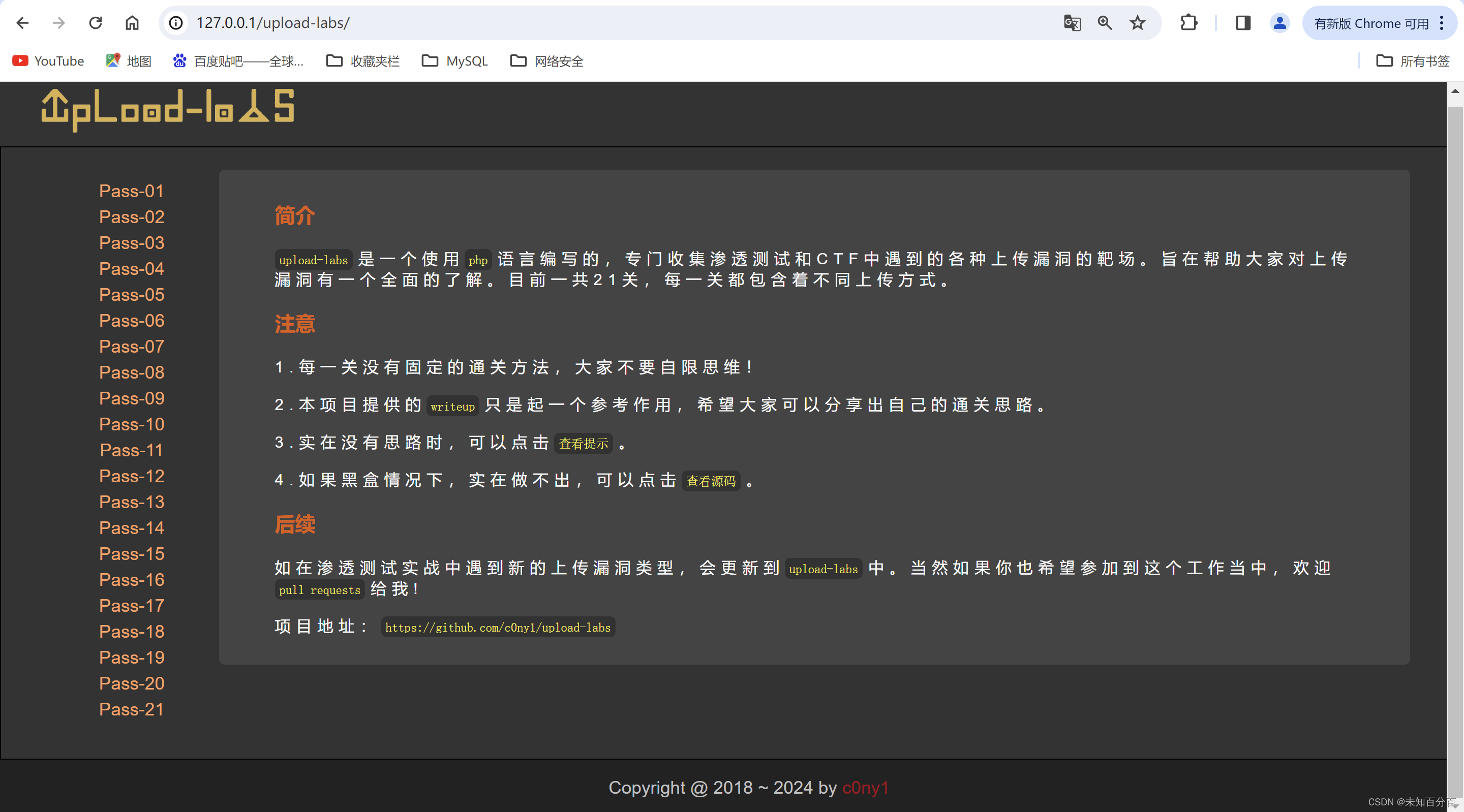
文件上传漏洞:upload-labs靶场通关
2024-02-17 03:20:01
32
阅读
IT行业:哪些证书含金量高?
2024-02-17 03:20:01
26
阅读
CRM项目使用redis作为缓存工具类并通过Redis-Service的逻辑拆分实现解耦合------CRM项目
2024-02-17 03:20:01
30
阅读