【ROS机器人系统】实验3 了解ROS中常用组件:launch启动文件、Qt工具箱和rviz三维可视化环境
- 开发
- 28
-
实验3 了解ROS中常用组件:launch启动文件、Qt工具箱和rviz三维可视化环境
1、实验目的
了解ROS中常用组件,具体内容如下:
(1)学会使用launch 启动文件同时启动多个节点。(2)学会使用Qt工具箱中的常用工具。
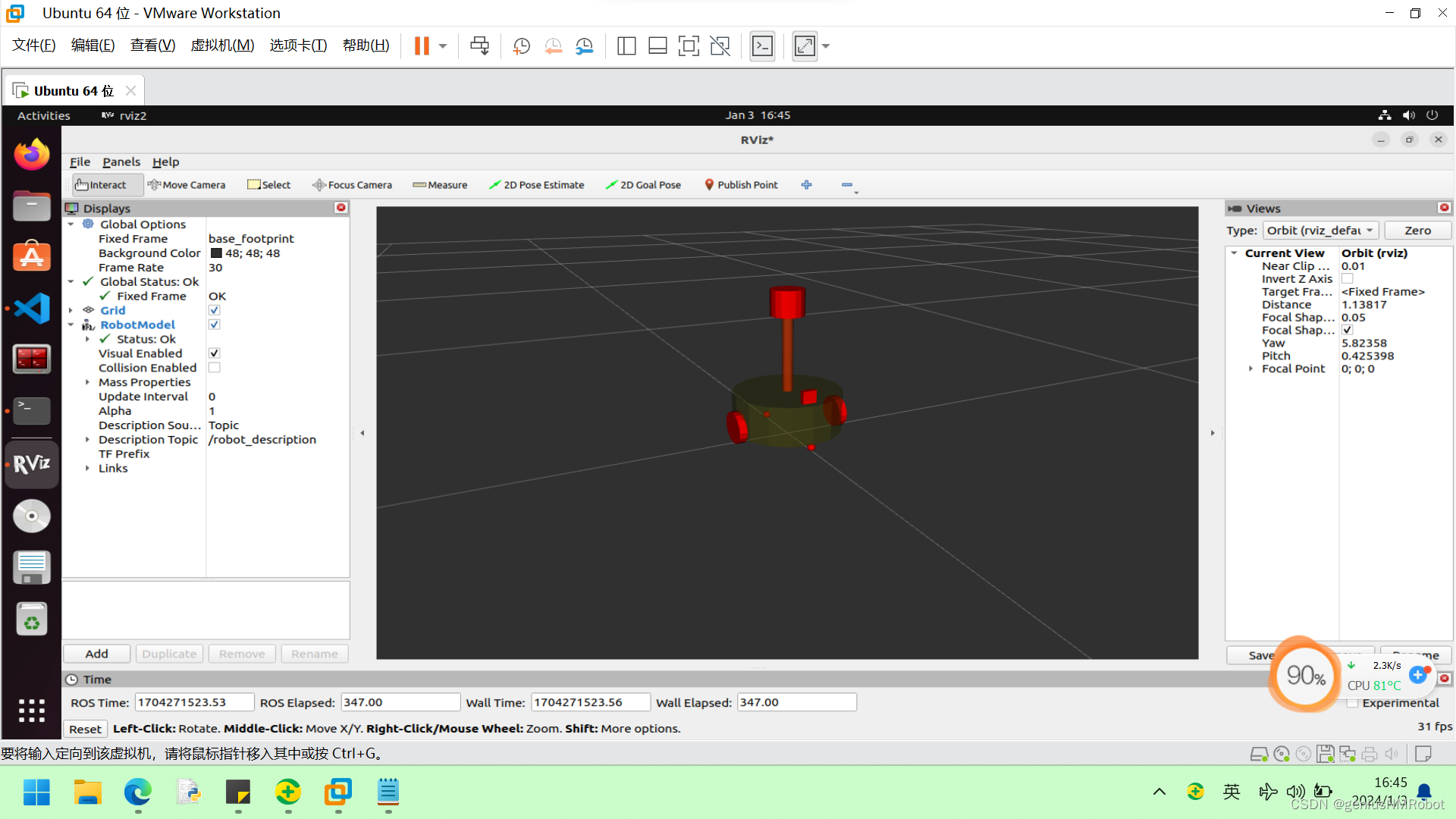
(3)学会使用rviz相关插件。
2、实验设备
硬件环境:windows 10
系统环境:
原文地址:https://blog.csdn.net/weixin_45912291/article/details/136037230
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。
本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:https://www.suanlizi.com/kf/1756292941636308992.html
如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!

![[<span style='color:red;'>ROS</span> <span style='color:red;'>系列</span>学习教程] rqt<span style='color:red;'>可</span><span style='color:red;'>视</span><span style='color:red;'>化</span><span style='color:red;'>工具箱</span> - Topic<span style='color:red;'>工具</span>](https://img-blog.csdnimg.cn/direct/b61045e6110c4a5a822bd3ef7cbdfb1c.png#pic_center)



















![[WinForm开源]概率计算器 - Genshin Impact(V1.0)](https://img-blog.csdnimg.cn/direct/2f13e793b5d0452aa3e8597d7ba5e5c2.png)