一、代码
source_pc = pcread('bun_zipper.ply');
target_pc = pcread('bun_zipper2.ply');
% 下采样
gridStep = 0.001;
ptCloudA = pcdownsample(source_pc,'gridAverage',gridStep);
ptCloudB = pcdownsample(target_pc,'gridAverage',gridStep);
% 初始变换矩阵
tform_initial = affine3d();
% 执行点云配准
tform = pcregistericp(ptCloudA,ptCloudB,'Extrapolate',true);
% 提取平移向量
translation = tform.T(4, 1:3);
% 提取旋转矩阵
rotation_matrix = tform.T(1:3, 1:3);
% 将旋转矩阵转换为欧拉角
eulerAngles = rotm2eul(rotation_matrix);
% 应用配准变换到源点云
registered_source_pc = pctransform(source_pc, tform);
% 打印信息
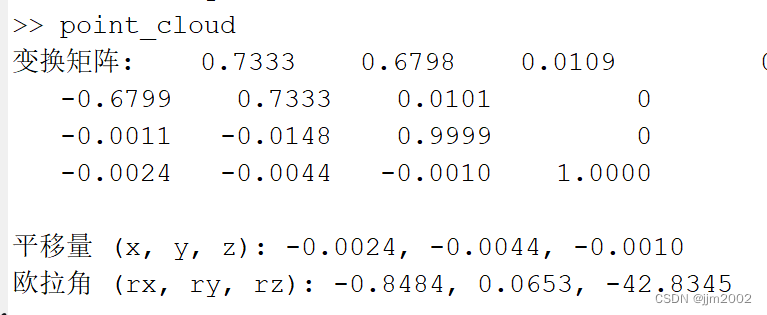
fprintf('变换矩阵:')
disp(tform.T)
fprintf('平移量 (x, y, z): %.4f, %.4f, %.4f\n', translation(1), translation(2), translation(3));
fprintf('欧拉角 (rx, ry, rz): %.4f, %.4f, %.4f\n', rad2deg(eulerAngles(3)), rad2deg(eulerAngles(2)), rad2deg(eulerAngles(1)));
% 可视化结果
figure("Name", "原图像与配准后的图像");
set(gcf,'position',[150 80 1000 800])
subplot(2,1,1)
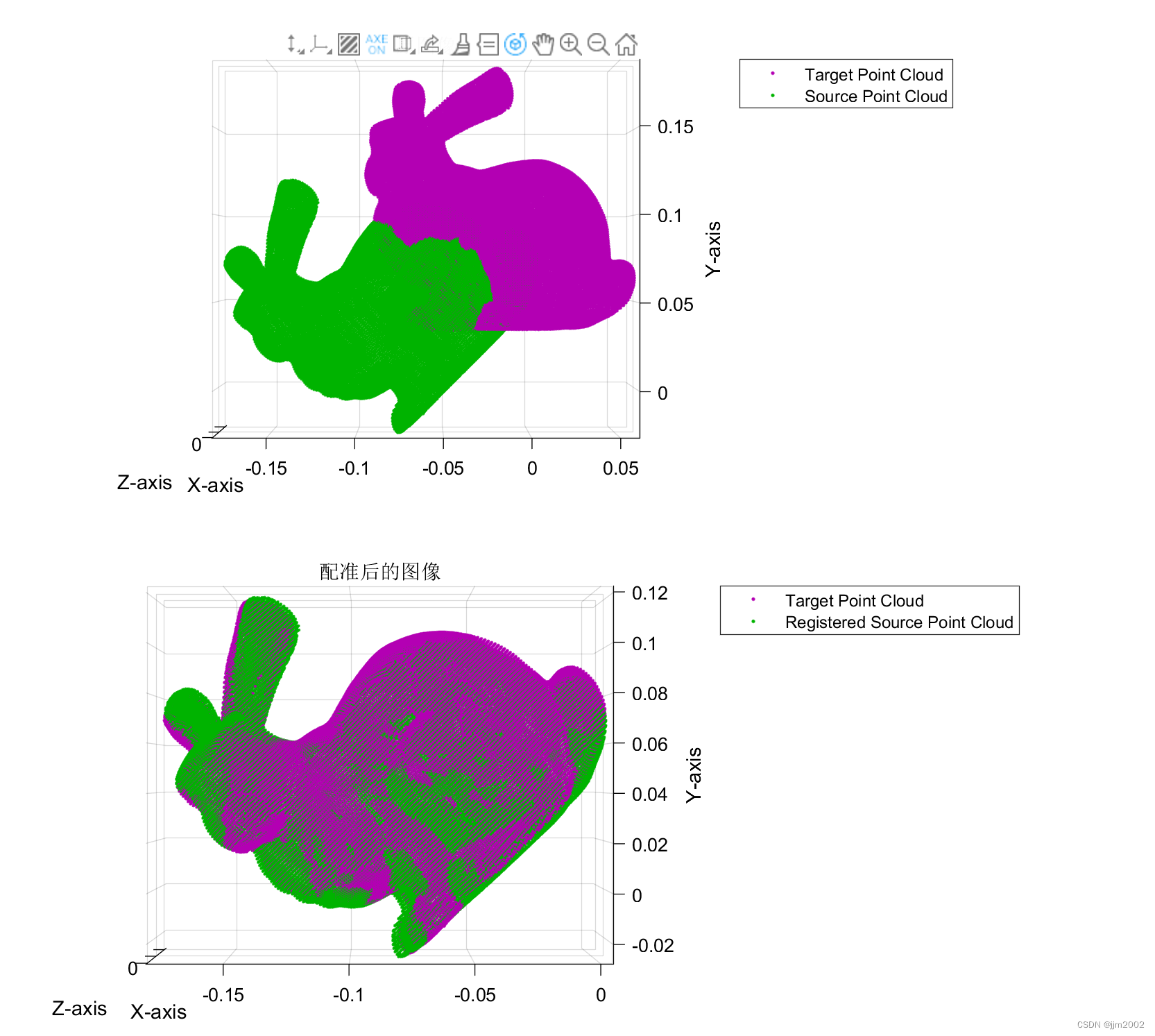
pcshowpair(ptCloudA, ptCloudB, 'MarkerSize', 20,'BackgroundColor',"white");
title('原图像');
xlabel('X-axis');
ylabel('Y-axis');
zlabel('Z-axis');
view(2)
legend('Target Point Cloud', 'Source Point Cloud');
%figure("Name", "配准后的图像");
subplot(2,1,2)
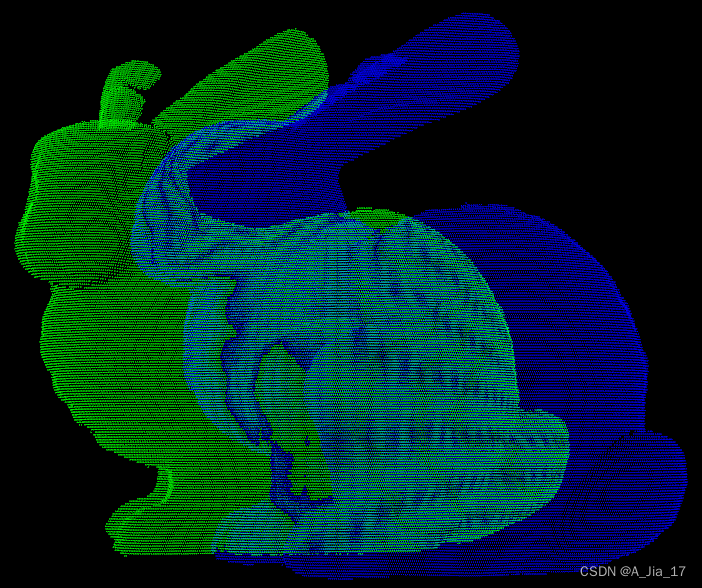
pcshowpair(target_pc, registered_source_pc, 'MarkerSize', 20,'BackgroundColor',"white");
title('配准后的图像');
xlabel('X-axis');
ylabel('Y-axis');
zlabel('Z-axis');
view(2)
legend('Target Point Cloud', 'Registered Source Point Cloud');
% 调整子图之间的距离
h = gcf; % 获取当前图形的句柄
h.Children(1).Position(2) = h.Children(1).Position(2) + 0.05; % 调整第一个子图的位置
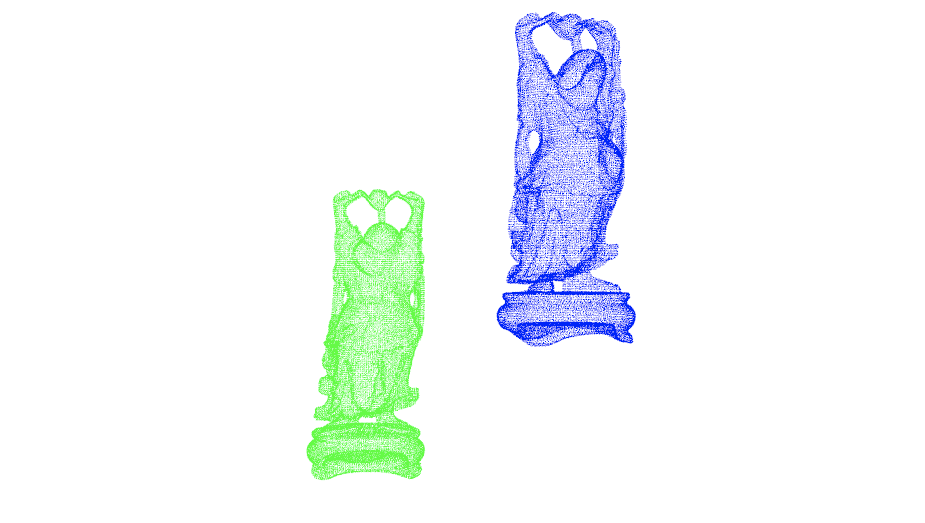
h.Children(2).Position(2) = h.Children(2).Position(2) - 0.05; % 调整第二个子图的位置二、结果
三、工具箱安装和示例文件
工具箱:链接:https://pan.baidu.com/s/1hMnNSQ_fIYasApViHPLsww
提取码:wstc
示例文件:链接:https://pan.baidu.com/s/1ql_q4jnUZjlZL3l3fRo8vQ
提取码:wstc