使用ouster激光雷达传感器分别录制自己在静态场景,以及动态场景的数据集. 其中录制的topic包含ouster自带IMU传感器数据,以及激光雷达传感器:
topic名称:
/ouster/points
/ouster/imu在静态场景下录制的数据集为park0,动态场景下录制的数据集为park1.
静态场景中构建地图采用liorf:
https://github.com/YJZLuckyBoy/liorf配置文件:lio_sam_ouster.yanl:
构建的地图:

使用liorf_localization进行重定位:
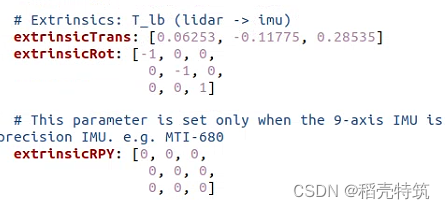
https://github.com/YJZLuckyBoy/liorf_localization只需调整 Localization.yaml中与自己数据集相关的topic名称以及传感器的Extrinsics:
重定位后的轨迹为:
L