00. 目录
文章目录
01. 串口简介
串口通讯(Serial Communication)是一种设备间非常常用的串行通讯方式,因为它简单便捷,因此大部分电子设备都支持该通讯方式, 电子工程师在调试设备时也经常使用该通讯方式输出调试信息。
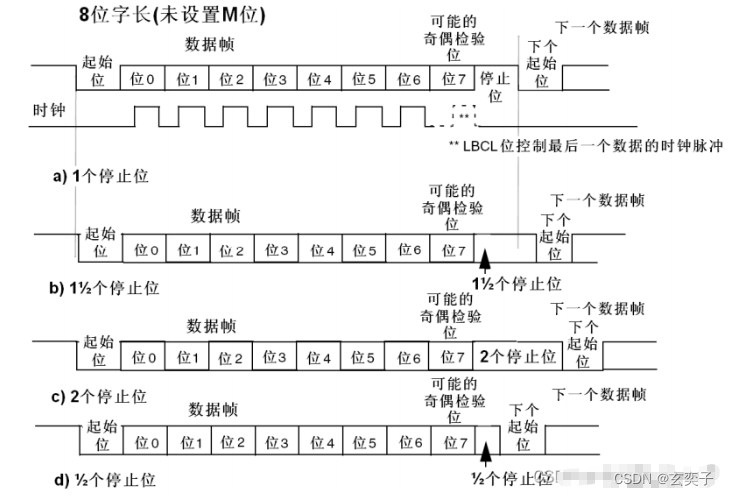
在计算机科学里,大部分复杂的问题都可以通过分层来简化。如芯片被分为内核层和片上外设;STM32标准库则是在寄存器与用户代码之间的软件层。 对于通讯协议,我们也以分层的方式来理解,最基本的是把它分为物理层和协议层。物理层规定通讯系统中具有机械、电子功能部分的特性, 确保原始数据在物理媒体的传输。协议层主要规定通讯逻辑,统一收发双方的数据打包、解包标准。 简单来说物理层规定我们用嘴巴还是用肢体来交流,协议层则规定我们用中文还是英文来交流。
02. 串口相关API
2.1 USART_Init
/**
* @brief Initializes the USARTx peripheral according to the specified
* parameters in the USART_InitStruct .
* @param USARTx: Select the USART or the UART peripheral.
* This parameter can be one of the following values:
* USART1, USART2, USART3, UART4 or UART5.
* @param USART_InitStruct: pointer to a USART_InitTypeDef structure
* that contains the configuration information for the specified USART
* peripheral.
* @retval None
*/
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct)
功能:
根据 USART_InitStruct 中指定的参数初始化外设 USARTx 寄存器
参数:
USARTx:x 可以是 1,2 或者 3,来选择 USART 外设
USART_InitStruct:指向结构 USART_InitTypeDef 的指针,包含了外设 USART 的配置信息。
返回值:
无
2.2 USART_InitTypeDef
/**
* @brief USART Init Structure definition
*/
typedef struct
{
uint32_t USART_BaudRate; /*!< This member configures the USART communication baud rate.
The baud rate is computed using the following formula:
- IntegerDivider = ((PCLKx) / (16 * (USART_InitStruct->USART_BaudRate)))
- FractionalDivider = ((IntegerDivider - ((u32) IntegerDivider)) * 16) + 0.5 */
uint16_t USART_WordLength; /*!< Specifies the number of data bits transmitted or received in a frame.
This parameter can be a value of @ref USART_Word_Length */
uint16_t USART_StopBits; /*!< Specifies the number of stop bits transmitted.
This parameter can be a value of @ref USART_Stop_Bits */
uint16_t USART_Parity; /*!< Specifies the parity mode.
This parameter can be a value of @ref USART_Parity
@note When parity is enabled, the computed parity is inserted
at the MSB position of the transmitted data (9th bit when
the word length is set to 9 data bits; 8th bit when the
word length is set to 8 data bits). */
uint16_t USART_Mode; /*!< Specifies wether the Receive or Transmit mode is enabled or disabled.
This parameter can be a value of @ref USART_Mode */
uint16_t USART_HardwareFlowControl; /*!< Specifies wether the hardware flow control mode is enabled
or disabled.
This parameter can be a value of @ref USART_Hardware_Flow_Control */
} USART_InitTypeDef;
USART_WordLength
/** @defgroup USART_Word_Length
* @{
*/
#define USART_WordLength_8b ((uint16_t)0x0000)
#define USART_WordLength_9b ((uint16_t)0x1000)
USART_StopBits
/** @defgroup USART_Stop_Bits
* @{
*/
#define USART_StopBits_1 ((uint16_t)0x0000)
#define USART_StopBits_0_5 ((uint16_t)0x1000)
#define USART_StopBits_2 ((uint16_t)0x2000)
#define USART_StopBits_1_5 ((uint16_t)0x3000)
USART_Parity
/** @defgroup USART_Parity
* @{
*/
#define USART_Parity_No ((uint16_t)0x0000)
#define USART_Parity_Even ((uint16_t)0x0400)
#define USART_Parity_Odd ((uint16_t)0x0600)
USART_Mode
/** @defgroup USART_Mode
* @{
*/
#define USART_Mode_Rx ((uint16_t)0x0004)
#define USART_Mode_Tx ((uint16_t)0x0008)
USART_HardwareFlowControl
/** @defgroup USART_Hardware_Flow_Control
* @{
*/
#define USART_HardwareFlowControl_None ((uint16_t)0x0000)
#define USART_HardwareFlowControl_RTS ((uint16_t)0x0100)
#define USART_HardwareFlowControl_CTS ((uint16_t)0x0200)
#define USART_HardwareFlowControl_RTS_CTS ((uint16_t)0x0300)
2.3 USART_Cmd
/**
* @brief Enables or disables the specified USART peripheral.
* @param USARTx: Select the USART or the UART peripheral.
* This parameter can be one of the following values:
* USART1, USART2, USART3, UART4 or UART5.
* @param NewState: new state of the USARTx peripheral.
* This parameter can be: ENABLE or DISABLE.
* @retval None
*/
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState)
功能:
使能或者失能 USART 外设
参数:
USARTx:x 可以是 1,2 或者 3,来选择 USART 外设
NewState: 外设 USARTx 的新状态这个参数可以取:ENABLE 或者 DISABLE
返回值:
无
2.4 USART_SendData
/**
* @brief Transmits single data through the USARTx peripheral.
* @param USARTx: Select the USART or the UART peripheral.
* This parameter can be one of the following values:
* USART1, USART2, USART3, UART4 or UART5.
* @param Data: the data to transmit.
* @retval None
*/
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
功能:
通过外设 USARTx 发送单个数据
参数:
USARTx:x 可以是 1,2 或者 3,来选择 USART 外设
Data: 待发送的数据
返回值:
无
2.5 USART_ReceiveData
/**
* @brief Returns the most recent received data by the USARTx peripheral.
* @param USARTx: Select the USART or the UART peripheral.
* This parameter can be one of the following values:
* USART1, USART2, USART3, UART4 or UART5.
* @retval The received data.
*/
uint16_t USART_ReceiveData(USART_TypeDef* USARTx)
功能:
返回 USARTx 最近接收到的数据
参数:
USARTx:x 可以是 1,2 或者 3,来选择 USART 外设
返回值:
接收到的字
03. 串口发送接线图

04. USB转串口模块

05. 串口发送程序示例
uart.h
#ifndef __UART_H__
#define __UART_H__
#include "stm32f10x.h"
void uart_init(void);
void uart_send_byte(uint8_t byte);
#endif /**/
uart.c
#include "uart.h"
void uart_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//GPIO初始化 PA9 TX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
USART_Cmd(USART1, ENABLE);
}
void uart_send_byte(uint8_t byte)
{
USART_SendData(USART1, byte);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
main.c
#include "stm32f10x.h"
#include "delay.h"
#include "oled.h"
#include "uart.h"
int main(void)
{
//初始化
OLED_Init();
uart_init();
//显示一个字符
OLED_ShowChar(1, 1, 'A');
uart_send_byte(0x41);
while(1)
{
}
return 0;
}
运行结果

06. 串口发送支持printf
配置:

uart.h
#ifndef __UART_H__
#define __UART_H__
#include "stm32f10x.h"
void uart_init(void);
void uart_send_byte(uint8_t byte);
void uart_send_array(uint8_t *arr, uint16_t len);
void uart_send_string(char *str);
void uart_send_number(uint32_t num, uint8_t len);
#endif /**/
uart.c
#include "uart.h"
#include <stdio.h>
void uart_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//GPIO初始化 PA9 TX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
USART_Cmd(USART1, ENABLE);
}
void uart_send_byte(uint8_t byte)
{
USART_SendData(USART1, byte);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void uart_send_array(uint8_t *arr, uint16_t len)
{
uint16_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(arr[i]);
}
}
void uart_send_string(char *str)
{
uint16_t i = 0;
while(*(str + i) != '\0')
{
uart_send_byte(str[i]);
i++;
}
}
//x的y次方
uint32_t uart_pow(uint32_t x, uint32_t y)
{
uint32_t result = 1;
while(y)
{
result *= x;
y--;
}
return result;
}
void uart_send_number(uint32_t num, uint8_t len)
{
uint8_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(num / uart_pow(10, len - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *fp)
{
uart_send_byte(ch);
return ch;
}
main.c
#include "stm32f10x.h"
#include <stdio.h>
#include "delay.h"
#include "oled.h"
#include "uart.h"
int main(void)
{
uint8_t arr[] = {
0x42, 0x43, 0x44, 0x45, 0x46};
//初始化
OLED_Init();
uart_init();
//显示一个字符
OLED_ShowChar(1, 1, 'A');
#if 0
uart_send_byte('B');
//发送数组
uart_send_array(arr, 5);
//发送字符串
uart_send_string("hello world\r\n");
uart_send_string("1234567890\r\n");
uart_send_number(1234, 4);
#endif
printf("num = %d\r\n", 6666);
while(1)
{
}
return 0;
}
运行结果

07. 串口发送支持printf_v2
uart.h
#ifndef __UART_H__
#define __UART_H__
#include "stm32f10x.h"
void uart_init(void);
void uart_send_byte(uint8_t byte);
void uart_send_array(uint8_t *arr, uint16_t len);
void uart_send_string(char *str);
void uart_send_number(uint32_t num, uint8_t len);
void uart_printf(char *format, ...);
#endif /**/
uart.c
#include "uart.h"
#include <stdio.h>
#include <stdarg.h>
void uart_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//GPIO初始化 PA9 TX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
USART_Cmd(USART1, ENABLE);
}
void uart_send_byte(uint8_t byte)
{
USART_SendData(USART1, byte);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void uart_send_array(uint8_t *arr, uint16_t len)
{
uint16_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(arr[i]);
}
}
void uart_send_string(char *str)
{
uint16_t i = 0;
while(*(str + i) != '\0')
{
uart_send_byte(str[i]);
i++;
}
}
//x的y次方
uint32_t uart_pow(uint32_t x, uint32_t y)
{
uint32_t result = 1;
while(y)
{
result *= x;
y--;
}
return result;
}
void uart_send_number(uint32_t num, uint8_t len)
{
uint8_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(num / uart_pow(10, len - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *fp)
{
uart_send_byte(ch);
return ch;
}
void uart_printf(char *format, ...)
{
char str[128];
va_list arg;
va_start(arg, format);
vsprintf(str, format, arg);
va_end(arg);
uart_send_string(str);
}
main.c
#include "stm32f10x.h"
#include <stdio.h>
#include "delay.h"
#include "oled.h"
#include "uart.h"
int main(void)
{
char string[100];
uint8_t arr[] = {
0x42, 0x43, 0x44, 0x45, 0x46};
//初始化
OLED_Init();
uart_init();
//显示一个字符
OLED_ShowChar(1, 1, 'A');
#if 0
uart_send_byte('B');
//发送数组
uart_send_array(arr, 5);
//发送字符串
uart_send_string("hello world\r\n");
uart_send_string("1234567890\r\n");
uart_send_number(1234, 4);
printf("num = %d\r\n", 6666);
#endif
sprintf(string, "\r\nnum=%d", 3333);
uart_send_string(string);
uart_printf("\r\nnum = %d\r\n", 4444);
uart_printf("\r\n");
while(1)
{
}
return 0;
}
测试结果
num=3333
num = 4444
08. 串口发送和接收接线图

09. 串口接收示例(轮询模式)
uart.h
#ifndef __UART_H__
#define __UART_H__
#include "stm32f10x.h"
void uart_init(void);
void uart_send_byte(uint8_t byte);
void uart_send_array(uint8_t *arr, uint16_t len);
void uart_send_string(char *str);
void uart_send_number(uint32_t num, uint8_t len);
void uart_printf(char *format, ...);
#endif /**/
uart.c
#include "uart.h"
#include <stdio.h>
#include <stdarg.h>
void uart_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//GPIO初始化 PA9 TX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//GPIO初始化 PA10 RX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
USART_Cmd(USART1, ENABLE);
}
void uart_send_byte(uint8_t byte)
{
USART_SendData(USART1, byte);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void uart_send_array(uint8_t *arr, uint16_t len)
{
uint16_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(arr[i]);
}
}
void uart_send_string(char *str)
{
uint16_t i = 0;
while(*(str + i) != '\0')
{
uart_send_byte(str[i]);
i++;
}
}
//x的y次方
uint32_t uart_pow(uint32_t x, uint32_t y)
{
uint32_t result = 1;
while(y)
{
result *= x;
y--;
}
return result;
}
void uart_send_number(uint32_t num, uint8_t len)
{
uint8_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(num / uart_pow(10, len - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *fp)
{
uart_send_byte(ch);
return ch;
}
void uart_printf(char *format, ...)
{
char str[128];
va_list arg;
va_start(arg, format);
vsprintf(str, format, arg);
va_end(arg);
uart_send_string(str);
}
main.c
#include "stm32f10x.h"
#include <stdio.h>
#include "delay.h"
#include "oled.h"
#include "uart.h"
int main(void)
{
uint16_t data = 0;
OLED_Init();
uart_init();
OLED_ShowChar(1, 1, 'A');
while(1)
{
if (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == SET)
{
data = USART_ReceiveData(USART1);
OLED_ShowHexNum(1, 1, data, 2);
}
}
return 0;
}
10. 串口接收示例(中断模式)
uart.h
#ifndef __UART_H__
#define __UART_H__
#include "stm32f10x.h"
void uart_init(void);
void uart_send_byte(uint8_t byte);
void uart_send_array(uint8_t *arr, uint16_t len);
void uart_send_string(char *str);
void uart_send_number(uint32_t num, uint8_t len);
void uart_printf(char *format, ...);
uint8_t uart_getRxFlag(void);
uint8_t uart_getRxData(void);
#endif /**/
uart.c
#include "uart.h"
#include <stdio.h>
#include <stdarg.h>
uint8_t recvData;
uint8_t recvFlag;
void uart_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//GPIO初始化 PA9 TX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//GPIO初始化 PA10 RX
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART_InitStruct.USART_BaudRate = 9600;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
//设置串口中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
//设置中断分组
NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStruct);
USART_Cmd(USART1, ENABLE);
}
void uart_send_byte(uint8_t byte)
{
USART_SendData(USART1, byte);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void uart_send_array(uint8_t *arr, uint16_t len)
{
uint16_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(arr[i]);
}
}
void uart_send_string(char *str)
{
uint16_t i = 0;
while(*(str + i) != '\0')
{
uart_send_byte(str[i]);
i++;
}
}
//x的y次方
uint32_t uart_pow(uint32_t x, uint32_t y)
{
uint32_t result = 1;
while(y)
{
result *= x;
y--;
}
return result;
}
void uart_send_number(uint32_t num, uint8_t len)
{
uint8_t i;
for (i = 0; i < len; i++)
{
uart_send_byte(num / uart_pow(10, len - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *fp)
{
uart_send_byte(ch);
return ch;
}
void uart_printf(char *format, ...)
{
char str[128];
va_list arg;
va_start(arg, format);
vsprintf(str, format, arg);
va_end(arg);
uart_send_string(str);
}
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
recvData = USART_ReceiveData(USART1);
recvFlag = 1;
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
uint8_t uart_getRxFlag(void)
{
if (1 == recvFlag)
{
recvFlag = 0;
return 1;
}
return 0;
}
uint8_t uart_getRxData(void)
{
return recvData;
}
main.c
#include "stm32f10x.h"
#include <stdio.h>
#include "delay.h"
#include "oled.h"
#include "uart.h"
int main(void)
{
uint16_t data = 0;
OLED_Init();
uart_init();
//中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
OLED_ShowChar(1, 1, 'A');
while(1)
{
if (1 == uart_getRxFlag())
{
data = uart_getRxData();
uart_send_byte(data);
OLED_ShowHexNum(1, 1, data, 2);
}
}
return 0;
}