点云数据获取和处理的代码如下:
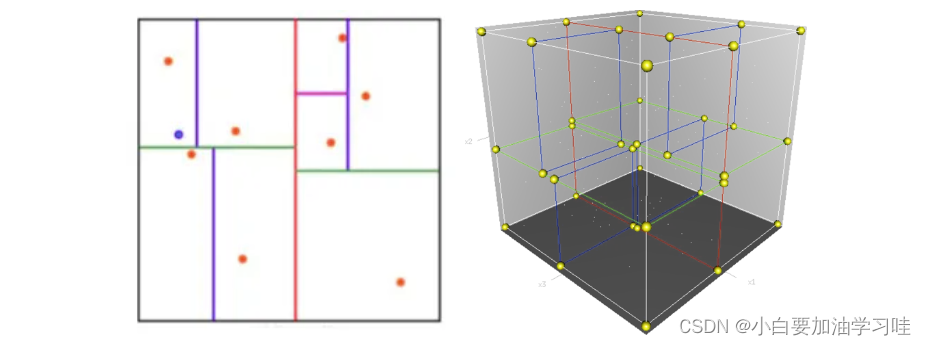
一、用DBSCAN聚类的方法处理点云数据
通过设置点云坐标的最大聚类对点云坐标进行归类,再将相同类的坐标求均值(中心点坐标),这些均值坐标通过手眼标定的转换矩阵转换为二维的相机坐标,再和相机拍到的目标的中心点坐标拟合,找到与目标坐标最适合的点云坐标,从而获得目标物的距离。 相机和雷达的手眼标定代码本人已经写完,可以参考微博1.激光雷达与相机的融合标定(附python代码)_雷达坐标系转相机坐标系-CSDN博客
这里我们只是通过聚类获得了点云的均值坐标。
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from sensor_msgs.msg import PointCloud2
import sensor_msgs.point_cloud2 as pc2
from std_msgs.msg import Header
from visualization_msgs.msg import Marker, MarkerArray
from geometry_msgs.msg import Point
#import torch
import numpy as np
import sys
import time
print(sys.version)
#from recon_barriers_model import recon_barriers
#from pclpy import pcl
from queue import Queue
import matplotlib
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
#%matplotlib
#聚类的数据处理
def cluster(points, radius=0.2):
"""
points: pointcloud
radius: max cluster range
"""
items = []
while len(points)>1:
item = np.array([points[0]])
base = points[0]
points = np.delete(points, 0, 0)
distance = (points[:,0]-base[0])**2+(points[:,1]-base[1])**2+(points[:,2]-base[2])**2
infected_points = np.where(distance <= radius**2)
item = np.append(item, points[infected_points], axis=0)
border_points = points[infected_points]
points = np.delete(points, infected_points, 0)
while len(border_points) > 0:
border_base = border_points[0]
border_points = np.delete(border_points, 0, 0)
border_distance = (points[:,0]-border_base[0])**2+(points[:,1]-border_base[1])**2
border_infected_points = np.where(border_distance <= radius**2)
item = np.append(item, points[border_infected_points], axis=0)
border_points = points[border_infected_points]
points = np.delete(points, border_infected_points, 0)
items.append(item)
return items
#点云的获取的部分数据的过滤
def recon_barriers(filename,msg_1s):
pcl_msg = pc2.read_points(filename, skip_nans=False, field_names=(
"x", "y", "z", "intensity","ring"))
np_p_2 = np.array(list(pcl_msg), dtype=np.float32)
print("===>",np_p_2.shape)
ss=np.where([s[0]>2 and s[1]<3 and s[-1]>-3 and s[2]>-0.5 for s in np_p_2])
#print(len(ss[0]))
#print(ss[0])
hh=np_p_2[ss]
print(hh.shape)
return hh
def velo_callback(msg):
pcl_msg = pc2.read_points(msg, skip_nans=False, field_names=(
"x", "y", "z", "intensity","ring"))
print(type(pcl_msg))
global max_marker_size_,frequence
frequence=1
if frequence % 2 == 0:
q.put(msg)
msg_1s = q.get()
else:
q.put(msg)
msg_1s = q.get()
ans = recon_barriers(msg,msg_1s)
item=cluster(ans, radius=0.2)
m_item=[]
for items in item:
print("..............",items.shape)
#x,y,z=int(items[:,:1].sum().mean())
x,y,z,r=items[:,:1].mean(),items[:,1:2].mean(),items[:,2:3].mean(),items[:,3:4].mean()
m_item.append([x,y,z])
print("=====+++++>>>>",len(item))
print(len(item[0]))
print(m_item)
fig = plt.figure()
ax = Axes3D(fig)
fig = plt.figure()
ax = Axes3D(fig)
#ax.scatter(item[:,0], item[:,1], item[:,2], s=1)
#fig.show()
if __name__ == '__main__':
# code added for using ROS
global max_marker_size_,frequence
q = Queue()
q.put(None)
rospy.init_node('lidar_node')
sub_ = rospy.Subscriber("livox/lidar", PointCloud2,
velo_callback, queue_size=100)
pub_arr_bbox = rospy.Publisher(
"visualization_marker", MarkerArray, queue_size=100)
print("ros_node has started!")
rospy.spin()
二、通过雷达的不同颜色对点云进行处理
将相同颜色的点云坐标归为一类,并求每个类的坐标的平均值(中心点坐标)。当环境比较单一,雷达反射的点云颜色类型较少时可以用这种方法。点云的返回坐标是(x,y,z,r),其中r是颜色,所以我们可以将颜色的数据切取后set,set是将重复的元素去掉,再遍历set对返回的点云np.where即可。