双水平正压呼吸机是什么?
- 市面上的双水平呼吸机,就是包含有双水平模式的呼吸机,其中一般也会包含单水平模式。
- 其中正压的意思,就是抬高呼吸的压力基线,使吸气顺畅一些。

呼吸机硬件参考
不能给太详细,就给个名字,具体的自己设计。
压力传感器、压力差传感器、数字型电机驱动器、带霍尔的涡轮风机(和驱动器配合一起,最好找一家同时生产涡轮风机和驱动器的厂商)等(其他的额外的东西就不重要啦!)。
呼吸机模式有哪些
就拿鱼跃的YH-820呼吸机来说,其:
- 单水平模式有CPAP;
- 双水平模式有S、T、ST、VGPS模式。
CPAP模式介绍(主要写的算法1)
CPAP诞生的历史是最早,沙利文博士搞的第一台呼吸机的就是这模式。
我的写法是按照《双水平呼吸机控制逻辑策略的设计与实现》这个论文的说法来写的,以下摘抄自论文双水平呼吸机控制逻辑策略的设计与实现。
CPAP模式下,呼吸机在整个呼吸过程中,给患者的气道提供恒定的压力支持。患者进行呼吸切换时,呼吸机将动态调整内部涡轮风机的转速,抵抗患者呼吸动作造成的干扰,维持恒定的压力。由于呼气和吸气时,呼吸机提供相同的压力,患者在呼气时需要克服压力做功,舒适度一般。
虽然都叫CPAP,但是网上的CPAP各有各的说法,比如我的师兄,写的CPAP是固定气道压力的CPAP,还是有点不一样(笑)。
APAP模式介绍(主要写的算法2,加一条)
APAP叫 Auto CPAP,自动的CPAP,哪里自动了?原来是在人呼吸阻塞的时候,给气道加个压呀!
本来呼吸的好好的,突然压力没有变化了!为啥?原来是人不呼吸了,加压!必须马上加压!
然后等人正常呼吸后,再恢复原本的压力。
S模式介绍(主要写的算法3)
双水平模式来喽!双水平是飞利浦第一个搞的。牛!
其和单水平的区别在于呼气和吸气时压力不一致!上图!
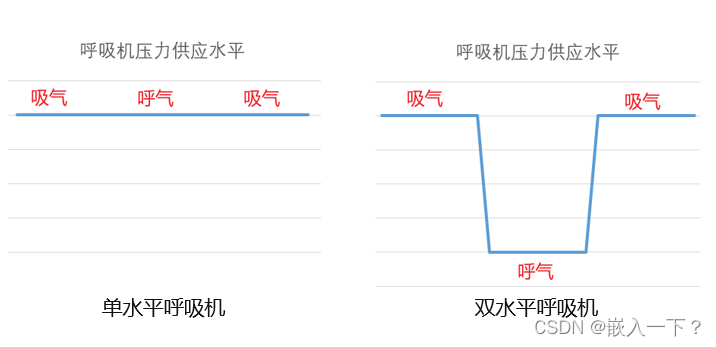
如何做到呢?先知道如何识别呼吸吧(算法部分再讲)!
T模式简单介绍
就是用户自己设定一个呼吸周期,吸气占呼气比例多少,然后病人被动的跟着呼吸机呼吸。
ST模式简单介绍
就是把S模式和T模式结合起来了,根据病人的呼气周期、吸气占比,来动态的调整呼气和吸气的时间。
VGPS 不-介绍
算法涉及到哪些内容?
气道压力对应电机速度、延时升压、呼吸罩穿戴检测、呼吸阻塞检测、阻塞升压、呼吸切换检测、呼气吸气切换时间安排、pid动态调压等。
- 气道压力对应电机速度:输入一个想要控制的气道压力值,输出电机速度,使气道达到该压力值。
- 延时升压:这个时基于患者舒适度考虑的,设定一个初始压力,在初始压力的基础上,不断升压,在设定时间内升压到设定压力;
- pid动态调压:
- 在单水平模式和双水平模式的非呼吸切换状态下,根据气道的压力,动态调节涡轮风机的转速,使气道压力动态稳定;
- 在双水平的呼吸切换状态下,快速切换呼气和吸气的气道压力。
- 呼吸切换检测:检测患者切换呼吸状态;
- 呼吸阻塞检测:检测患者呼吸受阻;
- 呼气吸气切换时间安排:在双水平模式下,切换两种气道压力时的切换时间,呼气到吸气为上升时间,吸气到呼吸为下降时间;
- 阻塞升压:在APAP模式下,当患者呼吸受阻时,自动提升气道的压力,直到患者恢复正常呼吸;
- 呼吸面罩的穿戴检测:检测人是否带上呼吸面罩。
算法实现
气道压力对应电机速度
我的控制电机是通过中间驱动器的,我对驱动器输入多少速度,电机就会自己达到那个速度,所以对于电机速度上,我不用管(你们要不要搞一个电机速度和电流的关系就不关我事了嘿嘿)。
如何做到电机速度对应压力呢?最简单的办法就是作拟合曲线。
上吧!我的 Excel !
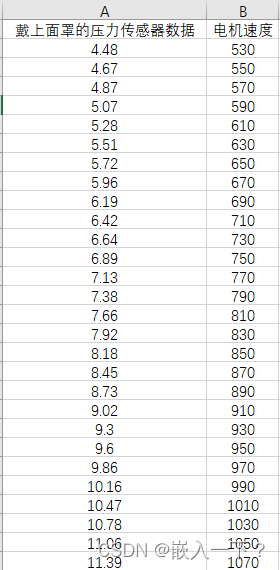
测出带上面罩的压力数据以及对应的电机速度数据,对这两列建立散点图。
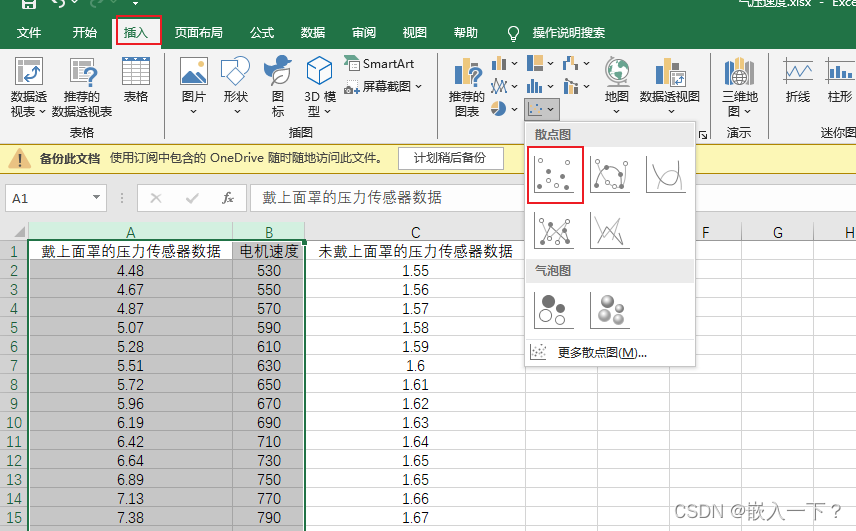
然后右键图像曲线,把这两列框上即可。
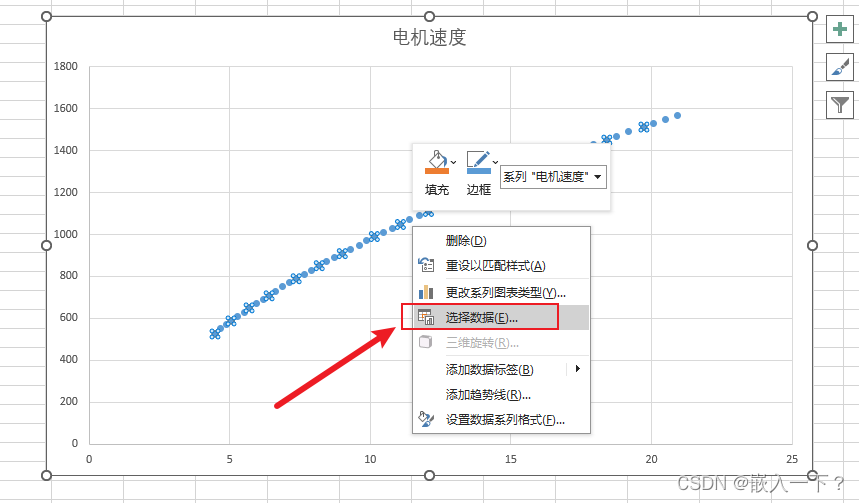
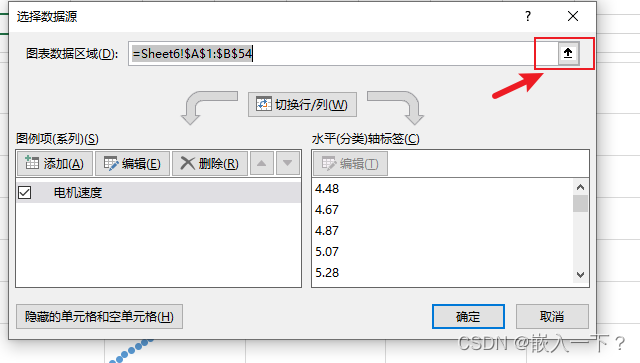
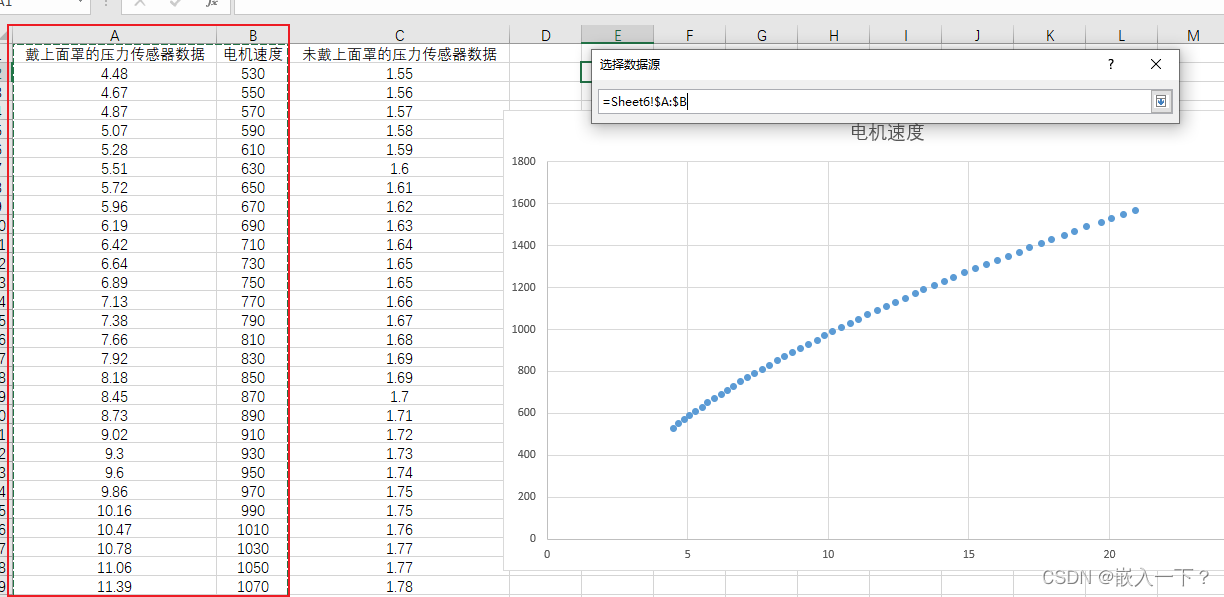
选择好后确认即可。
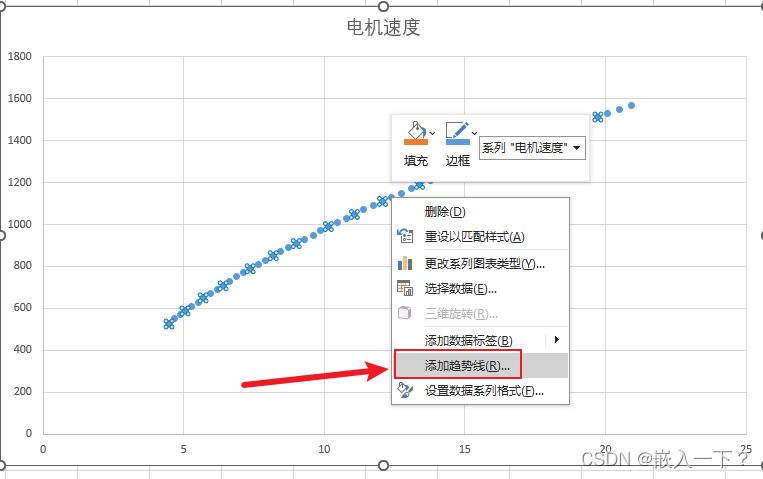
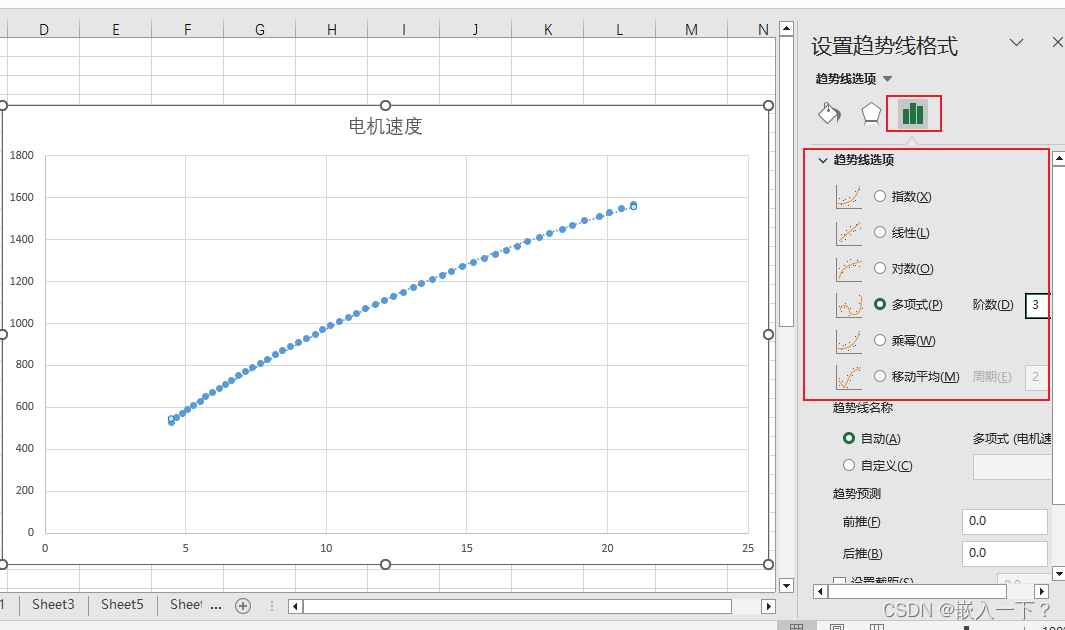
生成拟合曲线:
先添加趋势线,然后选择合适的趋势线选项,并且显示趋势线公式还有R2(R2越接近1说明拟合效果越好)
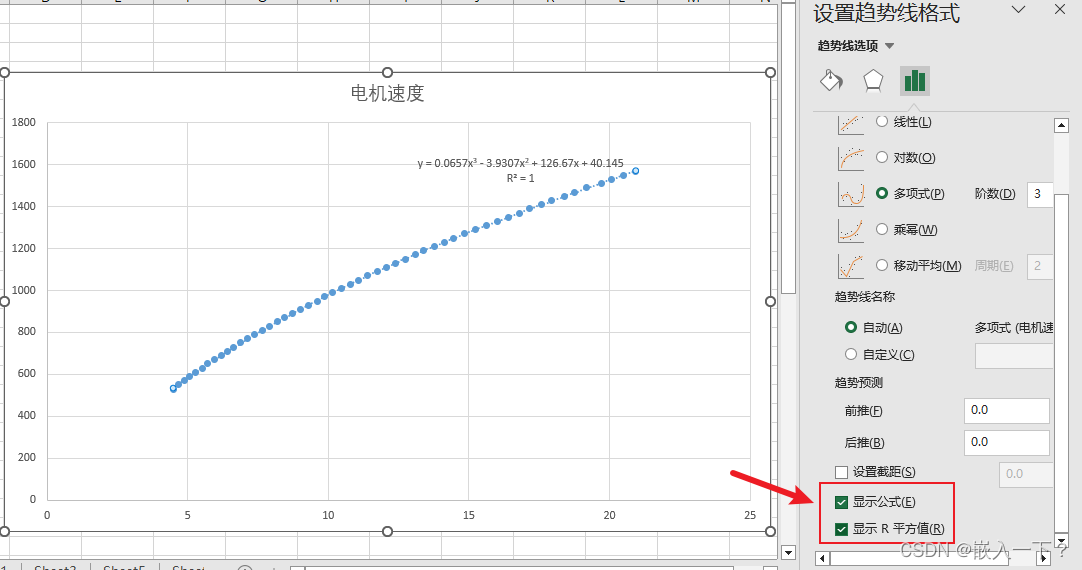
上面的公式是:
只要我想让气道输出一个固定的压力,比如4cmH2O,带入这个公式,算出的电机速度,直接发给驱动器就可以了。
验证一下:

是不是很相近了!
具体代码相关函数:
/*********************************************************************************************************
* 函数名称:PressureToMotoSpeed
* 函数功能:输入气压参数控制电机转速
* 输入参数:cmH2O:4.0 - 20.0 cmH2O
* 输出参数:void
* 返 回 值:void
* 创建日期:2023年11月16日
* 注 意:根据公式1:y = 0.06573 x3 - 3.93066 x2 + 126.67006 x + 40.14498, R2 = 0.99997 ,这一条是电机对面罩输出气压
*********************************************************************************************************/
void PressureToMotoSpeed(double cmH2O)
{
unsigned int realSpeed = 0;
realSpeed = (unsigned int)(0.06573*cmH2O*cmH2O*cmH2O - 3.93066*cmH2O*cmH2O + 126.67*cmH2O + 40.14498);
CtrlMotoSpeed(realSpeed);
}
这是一个函数,传入参数是厘米水柱,没有输出值。函数的作用是把厘米水柱的值,直接转换成电机速度,然后调用电机速度控制函数,直接控制电机。
延时升压
延时升压,经过一段时间,从初始压力逐渐上升到设定压力。
有几个参数需要注意:初始压力、设定压力、升压时间。
- 初始压力:刚启动时的压力;
- 设定压力:经过延时升压最终达到的压力;
- 升压时间:升压需要的时间。
根据鱼跃的YH-820呼吸机来看,他的延时升压是以0.1分钟为单位的,也就是每过0.1分钟,就上升一次压力,也就是我们得根据这个0.1分钟来细分升压的压力,例子如下:
初始压力 == 5 cmH2O
设定压力 == 10 cmH2O
升压时间 == 5min
我们先把 5min 乘上 10 == 50,也就是需要进行50次升压。
用 设定压力 - 初始压力 = 10 - 5 = 5 cmH2O,也就是总共需要升高5cmH2O的压力。
用 5cmH2O / 50次 = 0.1 cmH2O,也就是说每过 0.1分钟,需要升高 0.1cmH2O。
具体代码片段:
// 延时升压,当(s_boostPressureCnt2 > s_boostPressureCnt)时,延时升压结束。
if( s_boostPressureCnt2 <= s_boostPressureCnt )
{
if( e_iTimCnt >= s_DelayBoostStartTime + 6000*s_boostPressureCnt2 )
{
s_boostPressureCnt2++;
ctrlPressure += (Monitor_Set_Pressure-Monitor_Initial_Pressure) / (DelayedBoost*10);
// 延时升压的最后一轮升压,直接变成设定的压力,防止浮点计算出现的误差。
if( s_boostPressureCnt2 == s_boostPressureCnt )
{
ctrlPressure = Monitor_Set_Pressure;
}
}
}
以上参数解释:
- s_boostPressureCnt:总升压次数,如上例中的50次;
- s_boostPressureCnt2:当前升压的计数,每升一次压加1,直到大于总升压次数;
- e_iTimCnt:系统计时时间,每过1ms加1;
- s_DelayBoostStartTime:起始升压的时间,进入呼吸模式时记录的系统时间;
- 其中在系统计时中,6000 == 0.1min;
- ctrlPressure:当前压力;
- Monitor_Set_Pressure:设定压力;
- Monitor_Initial_Pressure:初始压力;
- DelayedBoost:延时升压的时间,如上例中的5min。
算法解释:
当前升压计数 <= 总升压次数,且升压最小时间到达,则升压一次,当最后一轮升压时,直接赋值设定压力。
呼吸罩穿戴检测
如何检测呼吸面罩是否穿戴?有的人用硬件解决这个问题(专门搞个模块检测的),有的人用软件解决这个问题(用 压力 或 压力差 传感器来看),我属于后者。
压力 传感器怎么看
有了上面的带上面罩的压力速度曲线后,咱们再加一条没带上面罩的压力数据曲线。
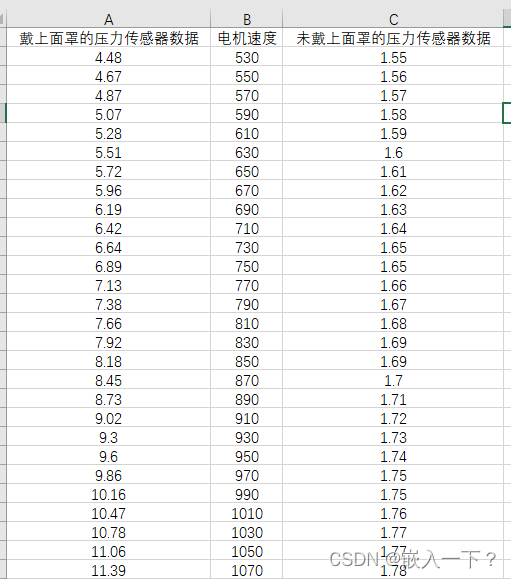

再对两个压力作拟合曲线,这样就可以知道在没戴面罩时对应的压力是多少了。
例如:
我设定一个气道压力维持在4.48,此时是我带上面罩应该有的气道压力,但是我实际检测到气道压力小于等于1.55(这里可以加一个常数偏大一点,因为脱面罩不会老是在这个值位置,可以会偏一点),这个时候我就可以认定是没带面罩了。
具体代码片段:
miniPressure = 0.0266*(double)ctrlPressure + 1.4685;
// 带着面罩
if( measurePressure > miniPressure )
{
WearingMaskCnt2 = 0;
if( WearingMaskCnt1++ > 10 )
{
WearingMaskCnt1 = 0;
// 清除未戴面罩标志位
WearingMaskFla = 0;
}
}
else
{
WearingMaskCnt1 = 0;
if( WearingMaskCnt2++ > 10 )
{
WearingMaskCnt2 = 0;
// 置位未戴面罩标志位
WearingMaskFla = 1;
}
}
参数解释:
- measurePressure:这是实际测量的气道压力值。
- ctrlPressure:这是实际应该要输出的戴面罩的压力值。
- miniPressure:这是对应压力下未带面罩时应该有的压力值。
算法解释:
当实测压力值大于未戴面罩压力值,且持续一段时间,则清除 未带面罩标志位(此时就相当于戴上了面罩),否则进入else一段时间,则为置位 未带面罩标志位。
压力差 传感器怎么看
压力差传感器可以相当于流量传感器的作用,当流量大于一定阈值时,就是没戴上面罩,反之则戴上了。
因为带上面罩气流值基本很小了,没带上面罩时,就算电机转的很慢,气流也会很大。
呼吸切换检测
呼气吸气怎么检测?
哎呀直接上图:
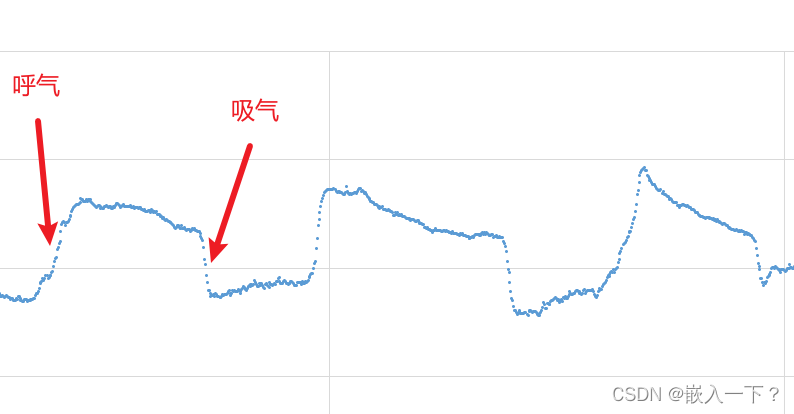
这个是我实测的气道压力变化图。
我只要一呼气,气道压力迅速上升,而后缓慢下降;
我只要一吸气,气道压力迅速下降,然后缓慢上升;
其中有两个点很好捕捉的,就是迅速上升和迅速下降的两个点。
那就可以用 判断趋势 + 判断阈值 两重办法来弄。
代码片段如下:
// 上升 + 阈值 = 呼气
if( measurePressure > LastPressure )
{
exhaleeCnt++;
if( exhaleeCnt >= ExhalationTriggerS )
{
if( measurePressure > ExhalationThreshold )
{
// 呼气计数清零
exhaleeCnt = 0;
// 吸气计数清零
inhaleCnt = 0;
// 呼气
printf("呼气\r\n");
}
}
}
else
{
exhaleeCnt = 0;
}
以上只有呼气部分,是因为吸气部分和呼气的内容大差不差,就简略掉了。
参数解释:
- measurePressure:当前气道压力;
- LastPressure:上次检测气道压力;
- exhaleeCnt:呼气上升计数;
- ExhalationTriggerS:呼气触发敏感度;
- ExhalationThreshold:呼气阈值;
- inhaleCnt:吸气下降计数;
算法解释:
当连续上升一定次数时,并且当前的气道气压大于设置的阈值时,就判定为呼气;一旦在上升期间出现下降,则清空上升计数。
注意:
ExhalationTriggerS 和 ExhalationThreshold 参数都得自己耐心调试得到哦!
呼吸阻塞检测
呼吸阻塞检测简单呀,当一段时间不呼气也不吸气就是阻塞了,这个时候直接判定为阻塞。
代码如下:
if( breathe == 0 )
{
// 阻塞判断
if( NotBreathingCnt++ > NotBreathingVal )
{
NotBreathingCnt = 0;
// 陷入阻塞
printf("阻塞\r\n");
}
}
else
{
NotBreathingCnt = 0;
}
参数解释:
breathe:不呼吸为0,呼吸为1;
NotBreathingCnt:不呼吸的持续计数值;
NotBreathingVal:不呼吸多久的认为设定参数值,需要自己调试得到。
算法解释:
当不呼吸且持续了一段时间,则陷入阻塞,否则清除不呼吸计数。
阻塞升压
在APAP模式中,陷入阻塞后逐渐上升压力。
// 不阻塞
if( TrappedInBlockage == 0 )
{
maintainCnt -= 10;
if( maintainCnt < -60 )
{
maintainCnt = 0;
if( ctrlPressure > SetPressure + (float)0.1 )
{
maintainPIDValCnt = 0;
ctrlPressure -= (float)0.5;
}
}
}
// 陷入阻塞
else if( TrappedInBlockage == 1 )
{
if( maintainCnt++ > 300 )
{
maintainCnt = 0;
ctrlPressure += (float)0.5;
if( ctrlPressure > (float)25.0 )
{
ctrlPressure = 25;
}
else if( ctrlPressure > SetPressureApap + AutopressureVal + (float)0.1 )
{
ctrlPressure = SetPressureApap + AutopressureVal;
}
}
}
参数解释:
- TrappedInBlockage:陷入阻塞标志位;
- maintainCnt:维持状态的计数值;
- ctrlPressure:当前的控制的气道压力;
- SetPressure:设置的气道压力;
- 阻塞一定时间就上升一次0.5cmH2O;
- 最大的气道压力限制在25cmH2O;
- AutopressureVal:最大阻塞升压值,阻塞后最大能达到的压力就是(SetPressureApap + AutopressureVal)。
算法解释:
陷入阻塞一段时间后上升一定的压力,持续这个动作,直到压力上升达到极限。反之当不阻塞时,迅速减小压力,直到回归原本的压力。
呼气吸气切换时间安排
对于双水平中,有上升时间和下降时间的概念,意思就是说,当人呼吸切换时,气道压力切换需要的时间。
例如:呼气切换到吸气,气道压力需要上升到吸气需要的压力,这个时候,给个一定的逐步上升时间,可以给人一定的舒适感。
具体代码内容放到双水平S模式讲解。
pid动态调压
对于pid不了解的可以看看这个文章:PID超详细教程——PID原理+串级PID+C代码+在线仿真调参
对于pid动态调压,最难的点就是pid参数的设置,其他都很简单,但是我这里不讲pid参数怎么调节啦!大家自己想办法吧(hhh)!
代码如下:
// 呼吸压力变化的情况下稳定压力。
pressureStabilityPID.target = ctrlPressure;
pid_calculate(&pressureStabilityPID, measurePressure);
if( pressureStabilityPID.output < 0 )
{
PressureToMotoSpeed(0);
}
else if( pressureStabilityPID.output > 25 )
{
PressureToMotoSpeed(25);
}
else
{
PressureToMotoSpeed(pressureStabilityPID.output);
}
// pid 输出过高,一般是取下面罩导致的
if( (pressureStabilityPID.output - ctrlPressure) > 3 )
{
// 进入稳定区域
}
// 气压过低,也是取下面罩导致的
if( measurePressure < miniPressure )
{
// 进入稳定区域
}
参数解释:
- pressureStabilityPID:pid结构体,包含pid的一些参数,如p、i、d参数、target目标值、output输出值等。
- ctrlPressure:当前的控制的气道压力;
- measurePressure:气压传感器读取的气道气压值。
- pid_calculate(&pressureStabilityPID, measurePressure):对目标值和实际值之间做pid计算,计算出的值给到 pressureStabilityPID.output;
- 不能输出负数的气压值,小于0就让他等于0;
- 限制气压最大在25cmH2O以下;
- pid的输出最大不要超过ctrlPressure一定值,自己设定一个合适值即可;
- miniPressure:未戴面罩应该有的压力值。
算法解释:
对目标气压值和实际气压值之间做pid运算,输出的气压值做一个限制,在一个范围内。当压力过小时,或者pid输出过大时(相当于没戴面罩),减小电机转速进入未戴面罩的稳定区域。
具体呼吸机模式编写
不管是什么呼吸机模式,都可以给他拆分为多个状态,如常见的几种状态:正常运行模式,未带面罩时的低风速模式,过度到低风速模式的中间模式等
CPAP
CPAP可以分为:戴上面罩的正常运行模式、戴上面罩向没有戴面罩的风机转速过度模式、未戴上面罩的低风速模式、未戴面罩向戴上面罩的风机转速过度模式。
为什么要有过度模式,因为我的电机转速变化太快会停转,所以加了一个过度模式。
戴上面罩的正常运行模式(状态0,overvoltageStopFlag == 0)
要求:pid需要正常运行、实时控制电机转速、要检测未戴面罩;
代码如下:
// 呼吸压力变化的情况下稳定压力。
pressureStabilityPID.target = ctrlPressure;
pid_calculate(&pressureStabilityPID, measurePressure);
if( pressureStabilityPID.output < 0 )
{
PressureToMotoSpeed(0);
}
else if( pressureStabilityPID.output > 25 )
{
PressureToMotoSpeed(25);
}
else
{
PressureToMotoSpeed(pressureStabilityPID.output);
}
// pid 输出过高
if( (pressureStabilityPID.output - ctrlPressure) > 3 )
{
overvoltageStopFlag = 2;
}
// 气压过低
if( measurePressure < miniPressure )
{
overvoltageStopFlag = 2;
}
以上代码有没有和pid动态调压部分很像!其实就是一个东西hh。
戴上面罩向没有戴面罩的风机转速过度模式(状态2,overvoltageStopFlag == 2)
要求:要延时一段时间稳定电机转速、清除pid的缓存值;
if( overvoltageStopCnt++ > 80 )
{
overvoltageStopCnt = 0;
overvoltageStopFlag = 3;
pid_clear(&pressureStabilityPID);
}
// 输出风机转速
PressureToMotoSpeed(ctrlPressure/2);
控制电机转速降低一半,也可以逐步降低,看自己怎么写。
未戴上面罩的低风速模式(状态3,overvoltageStopFlag == 3)
要求:检测呼吸。
// 检测到呼吸
if( ABS(LastBreathePressureVal - measurePressure ) > 0.06 )
{
LastBreathePressureVal = measurePressure;
BreathePressureCnt += 5;
if( BreathePressureCnt > 10 )
{
BreathePressureCnt = 0;
// 呼气启动
overvoltageStopFlag = 1;
}
}
else
{
if( BreathePressureCnt > -10 )
{
BreathePressureCnt--;
}
}
解释:
- ABS是取绝对值。
- 检测呼吸的判断就是,上次压力比这次压力差值大于一个自己调试出来的参数值(0.06),连续好几次就是呼吸了;
未戴面罩向戴上面罩的风机转速过度模式(状态1,overvoltageStopFlag == 1)
要求:提前稳定pid、电机转速进入过度速度。
if( overvoltageStopCnt++ > 130 )
{
overvoltageStopCnt = 0;
overvoltageStopFlag = 0;
}
pressureStabilityPID.target = ctrlPressure;
pid_calculate(&pressureStabilityPID, measurePressure);
// 输出风机转速
PressureToMotoSpeed(ctrlPressure/2);
控制电机转速为实际输出的一半,也可以逐步上升,看自己怎么写。
过程中一直计算pid,使到达状态0。
APAP
APAP和CPAP差不多,只加入了阻塞升压的功能,具体内容直接翻看上面的阻塞升压部分,这部分只在状态0生效。
双水平S模式
双水平的状态就多喽,不过也没多到哪里去,也就9种状态,呼气3种,吸气3种,戴没戴面罩切换2种,没戴面罩低风速1种。
呼气3种状态(状态1,3,5,overvoltageStopFlag == 1或3或5)
呼气正常pid调节状态(pid正常运算,判断pid过大,判断没戴面罩,判断吸气)、吸气上升(逐步上升输出气道压力、pid运算)、等待pid达到气道压力(pid控制电机、pi的稳定判断、判断pid过大)
呼气正常pid调节状态(状态1,overvoltageStopFlag == 1)
pid正常运算,判断pid过大,判断没戴面罩,判断吸气
// 呼吸压力变化的情况下稳定压力。
pressureStabilityPID.target = ctrlPressure;
pid_calculate(&pressureStabilityPID, measurePressure);
if( pressureStabilityPID.output < 0 )
{
PressureToMotoSpeed(0);
}
else if( pressureStabilityPID.output > 24 )
{
PressureToMotoSpeed(24);
}
else
{
PressureToMotoSpeed(pressureStabilityPID.output);
}
// 下降 + 阈值 = 吸气
if( LastPressure > measurePressure )
{
inhaleCnt++;
if( inhaleCnt >= InspiratoryTriggerS )
{
if( measurePressure < ctrlPressure )
{
inhaleCnt = 0;
exhaleeCnt = 0;
// 吸气
printf("吸气\r\n");
// 吸气上升
overvoltageStopFlag = 3;
// 设置新的pid参数
pid_init(&pressureStabilityPID, PID_Position, P2, I2, D2);
}
}
}
else
{
inhaleCnt = 0;
}
// pid 输出过高
if( (pressureStabilityPID.output - ctrlPressure) > 3 )
{
overvoltageStopFlag = 6;
}
// 气压过低
if( measurePressure < miniPressure )
{
overvoltageStopFlag = 6;
}
这些东西其实之前都介绍过了。
就是把他们杂糅起来而已。
其中这里设置了不同的pid参数:
pid_init(&pressureStabilityPID, PID_Position, P2, I2, D2);
为什么这样设置?
我们的pid参数实际上分为两种,一个是稳定状态下的pid动态调压,一个是呼吸切换时的快速pid切换调压,这里就是切换到快速pid调压。
吸气上升(状态3,overvoltageStopFlag == 3)
逐步上升输出气道压力、pid运算。
// pid计算
pressureStabilityPID.target = SuctionPressureS;
pid_calculate(&pressureStabilityPID, measurePressure);
// 逐渐上升
ctrlPressure += riseTimeMiniInterval;
// 输出风机转速
PressureToMotoSpeed(ctrlPressure);
if( overvoltageStopCnt++ >= 20*RiseTimeS )
{
overvoltageStopCnt = 0;
// 稳定吸气压力pid
overvoltageStopFlag = 5;
// 设置输出吸气压
ctrlPressure = SuctionPressureS;
}
这一段是吸气上升吸气上升阶段,包含了电机逐步上升,pid跟随上升,吸气上升结束时切换到等待pid稳定状态。
等待pid达到气道压力
pid控制电机、pi的稳定判断、判断pid过大;
// pid计算
pressureStabilityPID.target = ctrlPressure;
pid_calculate(&pressureStabilityPID, measurePressure);
if( pressureStabilityPID.output < 0 )
{
PressureToMotoSpeed(0);
}
else if( pressureStabilityPID.output > 24 )
{
PressureToMotoSpeed(24);
}
else
{
PressureToMotoSpeed(pressureStabilityPID.output);
}
// pid稳定
if( ABS(ctrlPressure - pressureStabilityPID.output) < (float)0.1 )
{
overvoltageStopFlag = 1;
// 恢复pid参数
pid_init(&pressureStabilityPID, PID_Position, P1, I1, D1);
}
// pid 输出过高
if( (pressureStabilityPID.output - ctrlPressure) > 6 )
{
overvoltageStopFlag = 6;
}
恢复正常运行状态下的pid参数:
pid_init(&pressureStabilityPID, PID_Position, P1, I1, D1);
这里的pid过高阈值设置的比较高,是因为这个参数的pid比较暴躁(应该是我没调好参数)。
吸气3种状态(状态0,2,4,overvoltageStopFlag == 0或2或4)
和呼气没太大区别,不写了!
戴面罩到没戴面罩过程中的2种状态(状态6,7,overvoltageStopFlag == 6或7)
电机稳定到设定气道压力的一半
if( overvoltageStopCnt++ > 80 )
{
overvoltageStopCnt = 0;
overvoltageStopFlag = 7;
pid_clear(&pressureStabilityPID);
pressureStabilityPID.output = ctrlPressure*2;
}
// 输出风机转速
PressureToMotoSpeed(ctrlPressure/2);
电机稳定到一个较小值
if( overvoltageStopCnt++ > 80 )
{
overvoltageStopCnt = 0;
overvoltageStopFlag = 8;
}
// 输出风机转速
PressureToMotoSpeed(miniPressure);
没戴面罩低风速1种(状态8,overvoltageStopFlag == 8)
// 检测到呼吸
if( ABS(LastBreathePressureVal - measurePressure) > (float)0.06 )
{
LastBreathePressureVal = measurePressure;
BreathePressureCnt += 5;
if( BreathePressureCnt > 10 )
{
BreathePressureCnt = 0;
// 呼气启动
overvoltageStopFlag = 1;
ctrlPressure = ExpiratoryPressureS;
// 恢复pid参数
pid_init(&pressureStabilityPID, PID_Position, P1, I1, D1);
exhaleeCnt = 0;
inhaleCnt = 0;
overvoltageStopCnt = 0;
}
}
else
{
if( BreathePressureCnt > -10 )
{
BreathePressureCnt--;
}
}
总结
大概就这些啦,其中代码都是简略贴上来的,部分耦合思路还得自己去想啦,就提供个大概方向,尼玛写的真累!!