目录
傅里叶变换原理
讲解傅里叶变换的文章有许多,而且洞见深刻,我作为一个学习者就不再从根源开始探讨了,这里给出几个大佬的文章链接。
好了,下面默认你对DFT思想有一定了解,接下来开始推导公式吧。
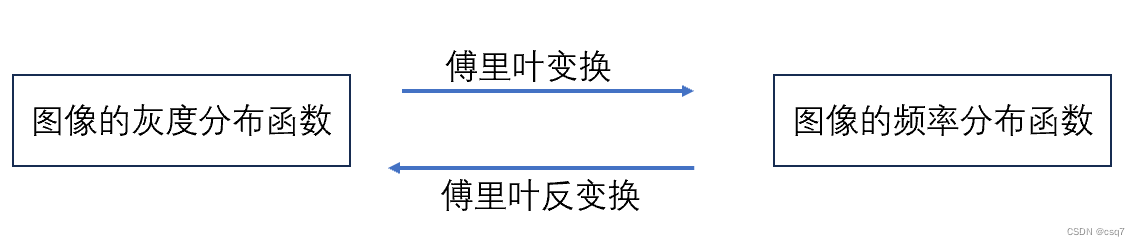
首先我们要明确傅里叶变换的目的,那就是某些信号在时域很难看出特征并区分,但是转换到频率域,就使得某些特征被明显区分。
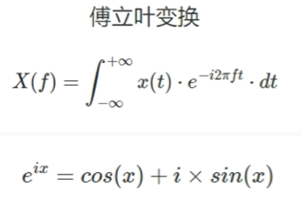
傅里叶变换的本质是内积,傅里叶变换就是将满足一定条件的某个函数表示成三角函数(正弦/余弦)或其积分的线性组合,将一个连续的信号(不方便处理)转换成一个个小信号的叠加(好处理)。
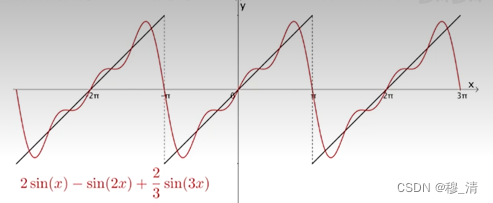
傅里叶原理表明:对于任何连续测量的数字信号,都可以用不同频率的正弦波信号的无限叠加来表示。
理论推导
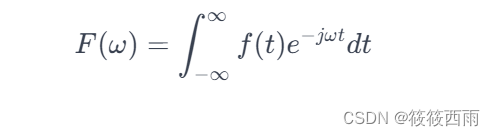
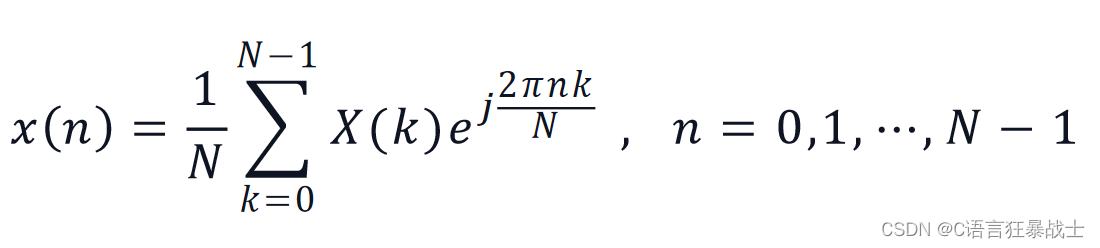
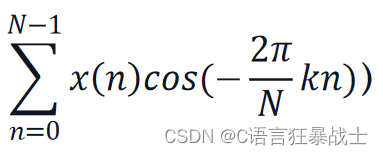
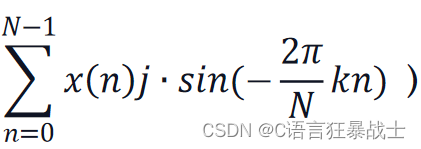
(DFT)序列x(n)(n=0,1,⋯,N−1)的离散傅里叶变换定义为:

(IDFT)序列X(k)的离散傅里叶反变换定义为:
为了把难搞的指数函数替换掉,请出欧拉公式:
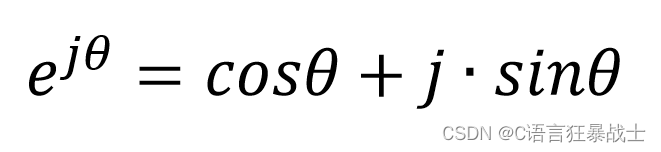
将欧拉公式带入DFT公式,式中,k=0,1,⋯,N−1,这就是接下来我们做正变换的公式了:

同样地,将欧拉公式带入IDFT公式,式中,n=0,1,⋯,N−1:
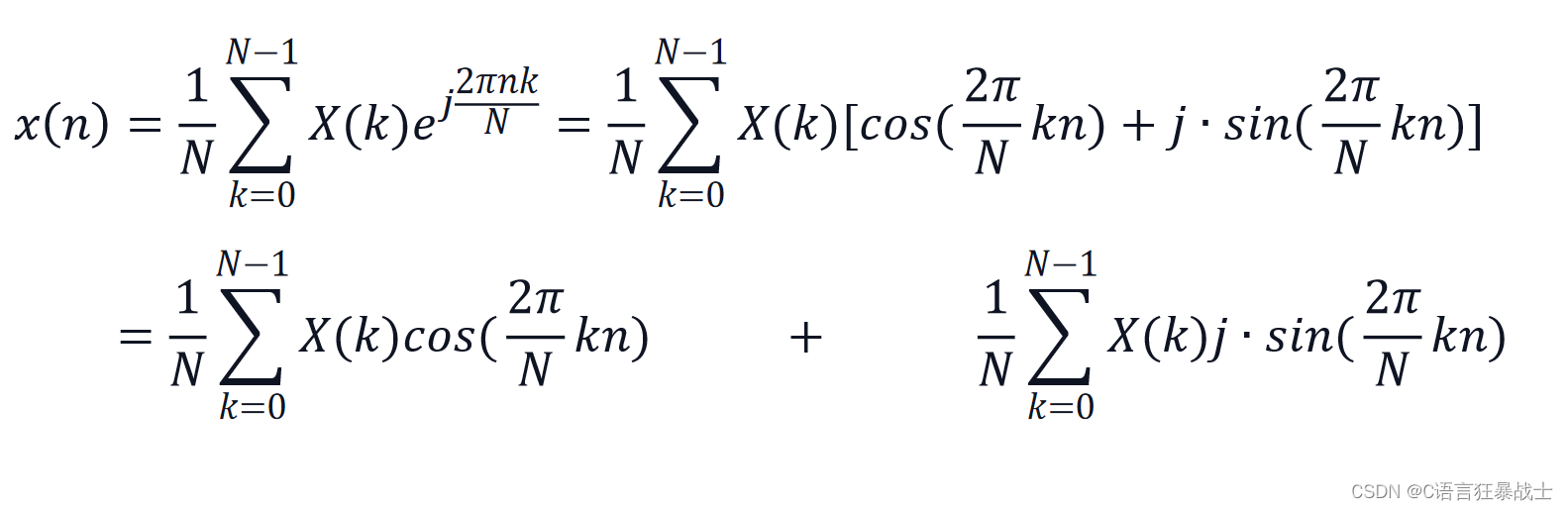
接下来很重要的一步,将正变换的公式带进反变换公式,x(n)可以进一步展开为四项:

现在我们来分析一下,①和④中不包含虚数单位(④中两个j等价为-1),也就是说,它俩个为实数部分,很好,很符合时间域,毕竟x(n)表示时间域的离散序列数组嘛。
但是②和③呢,烦!都有虚数单位,怎么办?
要不直接忽视这两项吧,时间域不应该存在虚数,那这两项势必会消掉。
由三角函数我们知道,sin(-x)=-sinx;cos(-x)=cosx,那么②和③中的展开式的每一项都正好互相抵消!
舒服了!
现在我们把上式整理一下,就是接下来做反变换的公式了:

代码实现
正变换代码实现
那我们从hello world开始吧。
先创建一个文本:touch DFT.c
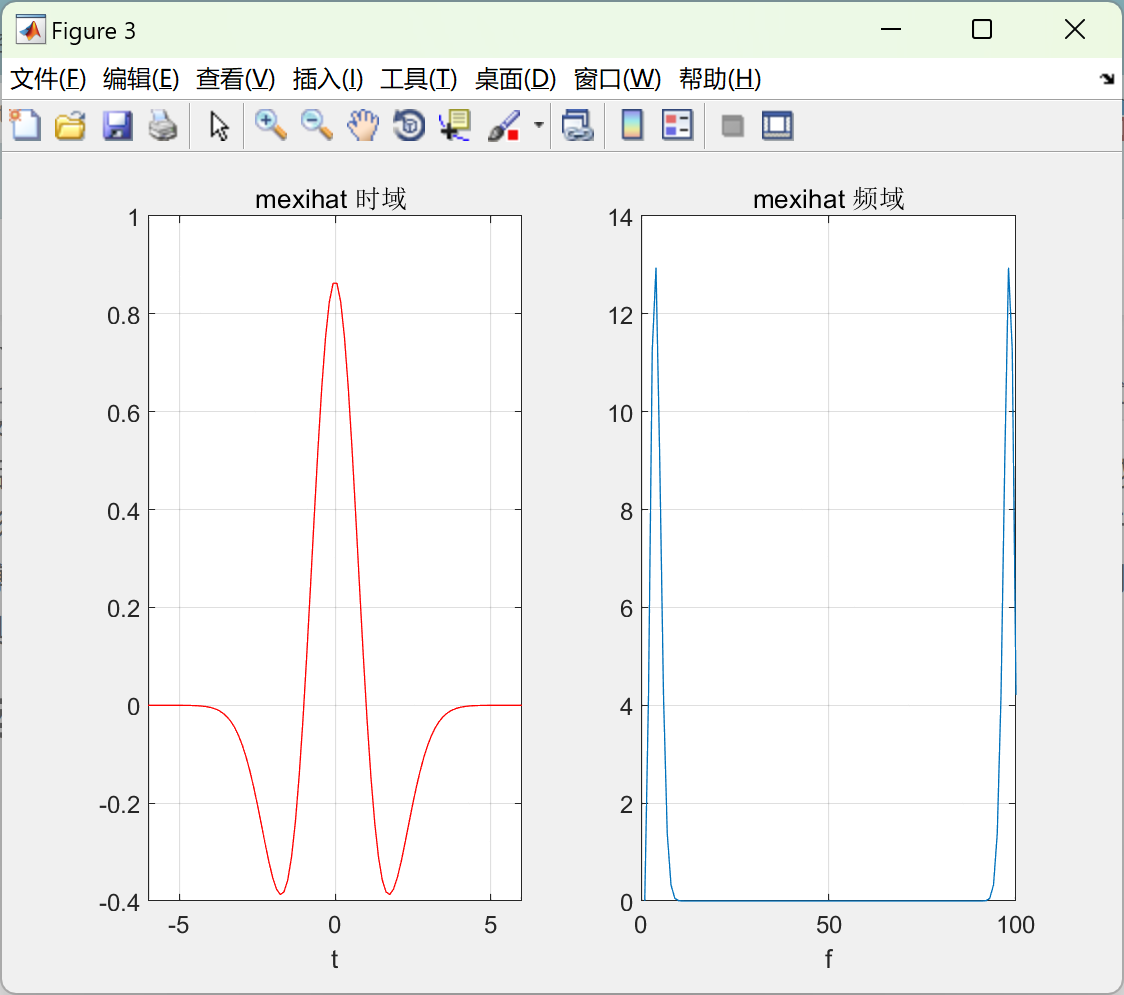
首先我们要做DFT,那必须要有用于变换的数据,为了适用于大多数看这篇文章的csdner,使用雷克子波做为演示,同时为了直观,把结果写到磁盘。
(为了下一盘大棋,使用1024数据长度的雷克子波。如果未来我有时间的话,会继续讲解FFT、二维FFT、褶积等等,使用2的幂长度的数据更方便理解)
int it,fm;
float t1,t0,N,dt;
FILE *fp;
N=1024;dt=0.0005;t0=0.1;fm=25;
float *ricker=(float *)malloc(sizeof(float)*N);
for(it=0;it<N;it++){
t1=it*dt-t0;
ricker[it]=(1.0-2.0*PI*PI*fm*fm*t1*t1)*exp(-(PI*PI*fm*fm*t1*t1));
}
fp=fopen("ricker.bin","wb");
fwrite(ricker,sizeof(float),N,fp);
fclose(fp);

现在数据有了,那就开始做正变换吧!
我们再把刚才推出的公式摘出来,照着敲代码吧,冲呀!
这里我们虽然使用的一维的ricker,但是为了匹配以后的二维数据,我们使用二维数据的DFT写法,做三层for循环,那雷克子波就相当于Nx==1。
傅里叶变换之后会产生实数部分和虚数部分两部分数据,同时,我们还可以使用两部分数据产生振幅数据amp,最后我们把三块数据写到磁盘。
最后,为了看看DFT用了多久时间,我们include<time.h>,调用时间函数。
void DFT(float * input,int Nx,int Nz,float * real,float * imag)
{
float *amp=(float *)malloc(sizeof(float)*Nx*Nz);
float R,I;
float re,im;
int ix,in,ik;
for(ix=0;ix<Nx;ix++)
{
for(ik=0;ik<Nz;ik++)
{
real[ix*Nz+ik]=0;
imag[ix*Nz+ik]=0;
R=0;
I=0;
for(in=0;in<Nz;in++)
{
R=cos(((-2)*PI*ik*in)/Nz);
I=sin(((-2)*PI*ik*in)/Nz);
real[ix*Nz+ik] += input[ix*Nz+in]*R;
imag[ix*Nz+ik] += input[ix*Nz+in]*I;
}
re=real[ix*Nz+ik];
im=imag[ix*Nz+ik];
amp[ix*Nz+ik]=sqrt(pow(re,2)+pow(im,2));
}
}
FILE *fp=fopen("ricker_dft_real.bin","wb");
FILE *fm=fopen("ricker_dft_imag.bin","wb");
FILE *fr=fopen("ricker_dft_amplitude.bin","wb");
fwrite(real,sizeof(float),Nx*Nz,fp);
fwrite(imag,sizeof(float),Nx*Nz,fm);
fwrite(amp,sizeof(float),Nx*Nz,fr);
fclose(fp);
fclose(fm);
fclose(fr);
free(amp);
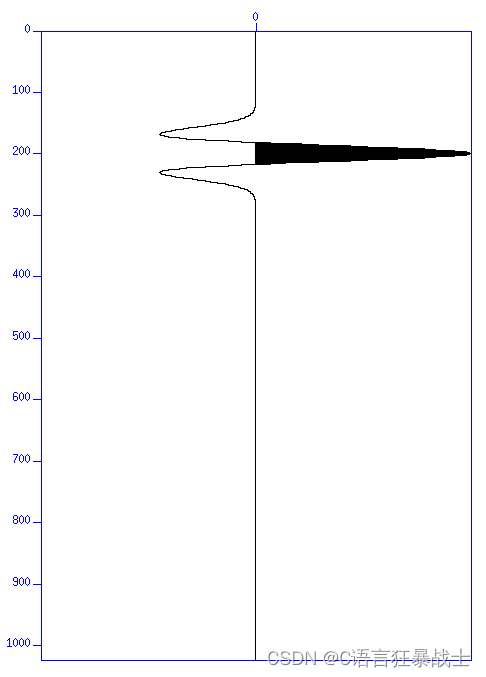
}现在看看实部、虚部、振幅谱数据吧!
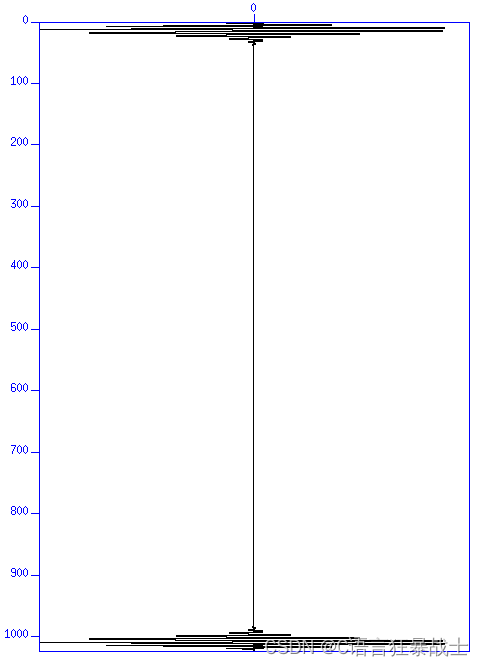


这就是实部、虚部、振幅数据,很直观地,我们可以发现最突出的特点,他们在频率域是对称的。
这启发我们为了减小运算量,是否可以只计算一半呢,这部分内容会在以后讲解。
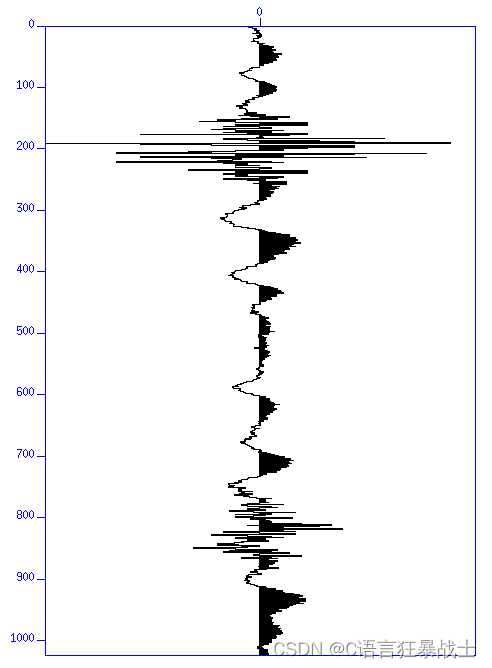
同时可以发现,振幅谱有一个波峰,那实际上就是我们给的主频25HZ。恰好验证了单一的频率在频率域显得十分空旷,数据中间有大量零值。(我们可以试想一下,如果时间域一个复杂的信号在频率域会被分解成什么样子呢,下一章节会介绍,歪七扭八、平平无奇的时域数据,在频域可谓是散如满天星!)
正变换讲完了,那反变换是如何开展的呢,我们继续!
反变换代码实现
通过前面的学习,我们有了正变换产生的实部和虚数数据,这两块数据就是用来做反变换的输入数据,等再一次反变换回到时间域,我们拿反变换的信号与最开始做的雷克子波做个残差,看看反变换的结果是否合理。
同样的,我们把反变换的公式摘下来,照着敲就好。
公式中
表示之前算出来的实部数据,对应的
表示之前正变换算出来的虚部数据
这里要务必注意!!!!
因为在正变换的时候,虚部数据的j我们是无法在表达式中体现的,所以j就被无视了,现在做反变换的时候,反变换表达式x(n)中的虚数单位可不能视而不见,因为后跟的表达式 j*sin(2*PI*k*n/N) 中又出现了一个虚数单位,j*j=-1;
也就是说,在实际计算中,反变换的表达式x(n)中间不再是加号了,而是减号。
void IDFT(float *real_part,float *imag_part,int Nx,int Nz,float *idft_part)
{
float *real=(float *)malloc(sizeof(float)*Nx*Nz);
float *imag=(float *)malloc(sizeof(float)*Nx*Nz);
float R,I;
int ix,in,ik;
for(ix=0;ix<Nx;ix++)
{
for(in=0;in<Nz;in++)
{
real[ix*Nz+in]=0;
imag[ix*Nz+in]=0;
R=0;
I=0;
for(ik=0;ik<Nz;ik++)
{
R=cos((2*PI*ik*in)/Nz);
I=sin((2*PI*ik*in)/Nz);
real[ix*Nz+in] += real_part[ix*Nz+ik]*R;
imag[ix*Nz+in] += imag_part[ix*Nz+ik]*I;
}
idft_part[ix*Nz+in]=((float)(real[ix*Nz+in]/Nz)-(float)(imag[ix*Nz+in]/Nz));//a-b !!!!
}
}
FILE *fp=fopen("ricker_idft.bin","wb");
fwrite(idft_part,sizeof(float),Nx*Nz,fp);
fclose(fp);
free(real);
free(imag);
}
残差
现在我们有两份时间域数据了,一份是根据雷克子波公式写的,一份是反变换出的,目测两个波形一致,为了更严谨一点,做个残差。
残差做了不算完,为了定量分析两者是否匹配,拿残差数据求取其L2范数,作为评判。
L2=0;
for(it=0;it<N;it++){
residual[it]=ricker[it]-Idft_part[it];
L2+=residual[it]*residual[it];
}
fprintf(stderr,"Residual between DFT with IDFT is %f\n",sqrt(L2));
fp=fopen("ricker_residual.bin","wb");
fwrite(residual,sizeof(float),N,fp);
fclose(fp);残差如下图,实际上,这一点也不奇怪,因为受限于数据类型的精度,两部分数据一定会有差异的,如果将数据类型由float改为double误差就会稍微小点,但是一定不能消除,毕竟计算机底层计算原理是离散的。
程序执行结束打印输出结果:
DFT time taken: 0.000000
IDFT time taken: 0.000000
Residual between DFT with IDFT is 0.000002
时间耗费分析:只能说数据量太小,咻的一下就算完了,之后搞的大的数据来测试。
残差分析:DFT和IDFT做的残差求取的L2范数为0.000002(2e-6),那就是说在十的负五次方精度下,两者一致。验证了DFT和IDFT算法的正确性。
完美!
全部源代码
编译方法:gcc DFT.c -o DFT -lm
#include<stdio.h>
#include<math.h>
#include<stdlib.h>
#include<time.h>
#define PI 3.1415926
void DFT(float * input,int Nx,int Nz,float * real,float * imag);
void IDFT(float *real_part,float *imag_part,int Nx,int Nz,float *idft_part);
int main()
{
int it,fm;
float t1,t0,N,dt,L2;
clock_t start,end;
FILE *fp;
N=1024;dt=0.0005;t0=0.1;fm=25;
float *ricker=(float *)malloc(sizeof(float)*N);
for(it=0;it<N;it++){
t1=it*dt-t0;
ricker[it]=(1.0-2.0*PI*PI*fm*fm*t1*t1)*exp(-(PI*PI*fm*fm*t1*t1));
}
fp=fopen("ricker.bin","wb");
fwrite(ricker,sizeof(float),N,fp);
fclose(fp);
float *Real_part=(float *)malloc(sizeof(float)*N);
float *Imag_part=(float *)malloc(sizeof(float)*N);
float *Idft_part=(float *)malloc(sizeof(float)*N);
float *residual =(float *)malloc(sizeof(float)*N);
start=clock();
DFT(ricker,1,N,Real_part,Imag_part);
end=clock();
fprintf(stderr,"DFT time taken: %lf\n",(double)((end-start)/CLOCKS_PER_SEC));
start=clock();
IDFT(Real_part,Imag_part,1,N,Idft_part);
end=clock();
fprintf(stderr,"IDFT time taken: %lf\n",(double)((end-start)/CLOCKS_PER_SEC));
L2=0;
for(it=0;it<N;it++){
residual[it]=ricker[it]-Idft_part[it];
L2+=residual[it]*residual[it];
}
fprintf(stderr,"Residual between DFT with IDFT is %f\n",sqrt(L2));
fp=fopen("ricker_residual.bin","wb");
fwrite(residual,sizeof(float),N,fp);
fclose(fp);
free(ricker);
free(Real_part);
free(Imag_part);
free(Idft_part);
free(residual);
return 0;
}
void DFT(float * input,int Nx,int Nz,float * real,float * imag)
{
float *amp=(float *)malloc(sizeof(float)*Nx*Nz);
float R,I;
float re,im;
int ix,in,ik;
for(ix=0;ix<Nx;ix++)
{
for(ik=0;ik<Nz;ik++)
{
real[ix*Nz+ik]=0;
imag[ix*Nz+ik]=0;
R=0;
I=0;
for(in=0;in<Nz;in++)
{
R=cos(((-2)*PI*ik*in)/Nz);
I=sin(((-2)*PI*ik*in)/Nz);
real[ix*Nz+ik] += input[ix*Nz+in]*R;
imag[ix*Nz+ik] += input[ix*Nz+in]*I;
}
re=real[ix*Nz+ik];
im=imag[ix*Nz+ik];
amp[ix*Nz+ik]=sqrt(pow(re,2)+pow(im,2));
}
}
FILE *fp=fopen("ricker_dft_real.bin","wb");
FILE *fm=fopen("ricker_dft_imag.bin","wb");
FILE *fr=fopen("ricker_dft_amplitude.bin","wb");
fwrite(real,sizeof(float),Nx*Nz,fp);
fwrite(imag,sizeof(float),Nx*Nz,fm);
fwrite(amp,sizeof(float),Nx*Nz,fr);
fclose(fp);
fclose(fm);
fclose(fr);
free(amp);
}
void IDFT(float *real_part,float *imag_part,int Nx,int Nz,float *idft_part)
{
float *real=(float *)malloc(sizeof(float)*Nx*Nz);
float *imag=(float *)malloc(sizeof(float)*Nx*Nz);
float R,I;
int ix,in,ik;
for(ix=0;ix<Nx;ix++)
{
for(in=0;in<Nz;in++)
{
real[ix*Nz+in]=0;
imag[ix*Nz+in]=0;
R=0;
I=0;
for(ik=0;ik<Nz;ik++)
{
R=cos((2*PI*ik*in)/Nz);
I=sin((2*PI*ik*in)/Nz);
real[ix*Nz+in] += real_part[ix*Nz+ik]*R;
imag[ix*Nz+in] += imag_part[ix*Nz+ik]*I;
}
idft_part[ix*Nz+in]=((float)(real[ix*Nz+in]/Nz)-(float)(imag[ix*Nz+in]/Nz));//a-b !!!!
}
}
FILE *fp=fopen("ricker_idft.bin","wb");
fwrite(idft_part,sizeof(float),Nx*Nz,fp);
fclose(fp);
free(real);
free(imag);
}一维离散傅里叶变换就到这里,但是呢,这个代码写的太死了,只能用于测试算法正确性,接下来为了让它灵活,为了可以计算任意给定数据的DFT和IDFT,下一篇文章我会用argc、argv、atoi等工具对它稍做升级,实现任意数据的离散傅里叶变换。
知识分享是我的初衷,在我自己学习过程中,鲜有案例讲解,踩了许多坑,如今窥探到了一点傅里叶的深邃思想,所以才有这篇文章。
如果你觉得这篇文章解决了你某个疑惑,不妨点个赞,让更多人看到,谢谢!