前言
固件版本:
Ardusub 4.1.2
地面站:
QGC独家汉化版
硬件:bluerov2,pix2.4.8飞控,云卓T10遥控器,um982双天线RTK
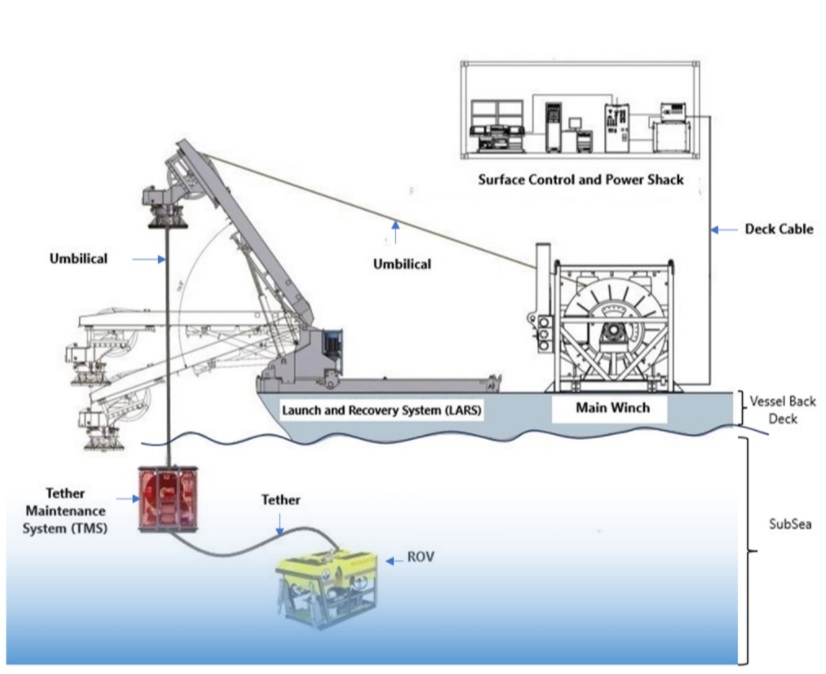
目前水下机器人大部分还是使用线缆通信。但是如果下潜深度不深的话,也可以采用无线通信。为了方便,本文没有使用线缆,直接使用云卓遥控器通过无线来控制ROV。原装GPS自带的罗盘容易受干扰,因此使用双天线RTK来定航向。
一、飞控基本设置
下载好固件后,第一步就是设置机型,本文使用的是6推进器的bluerov2,选择如下:
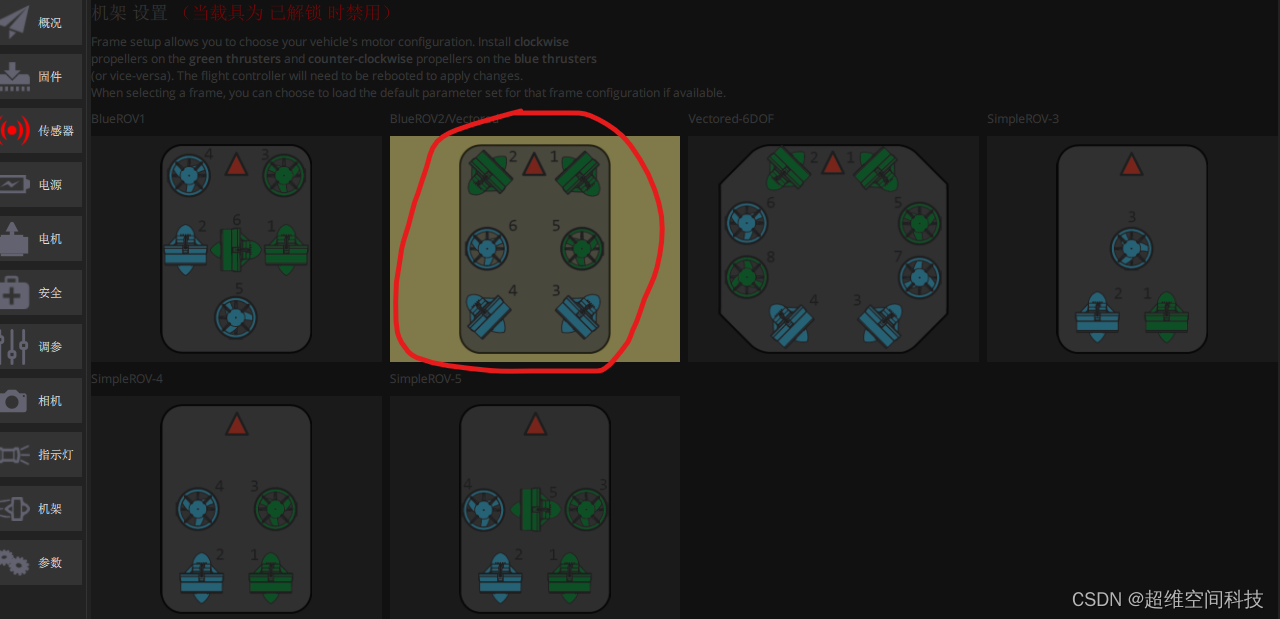
设置完重启
二、接线
接线的话按照地面站提示的接线即可
三、遥控器调参
ROV各个通道对应的指令如下:
6推进器版本的ROS没有Pitch通道的控制,这里建议把遥控器的1和2通道改成前向和侧向运动通道

具体在遥控器端设置就行,我用的是云卓T10,设置如下:


四、设置RTK参数
罗盘的干扰比较大,这里采用双天线RTK定航向,设置参数如下:
gps_type 设置成 NMEA
GPS 口的波特率设置成 230400
Ek3_src1_yaw 设置成 GPS
五、测试
连上手机地面站,通过地面站解锁、然后就可以通过遥控器控制电机转动