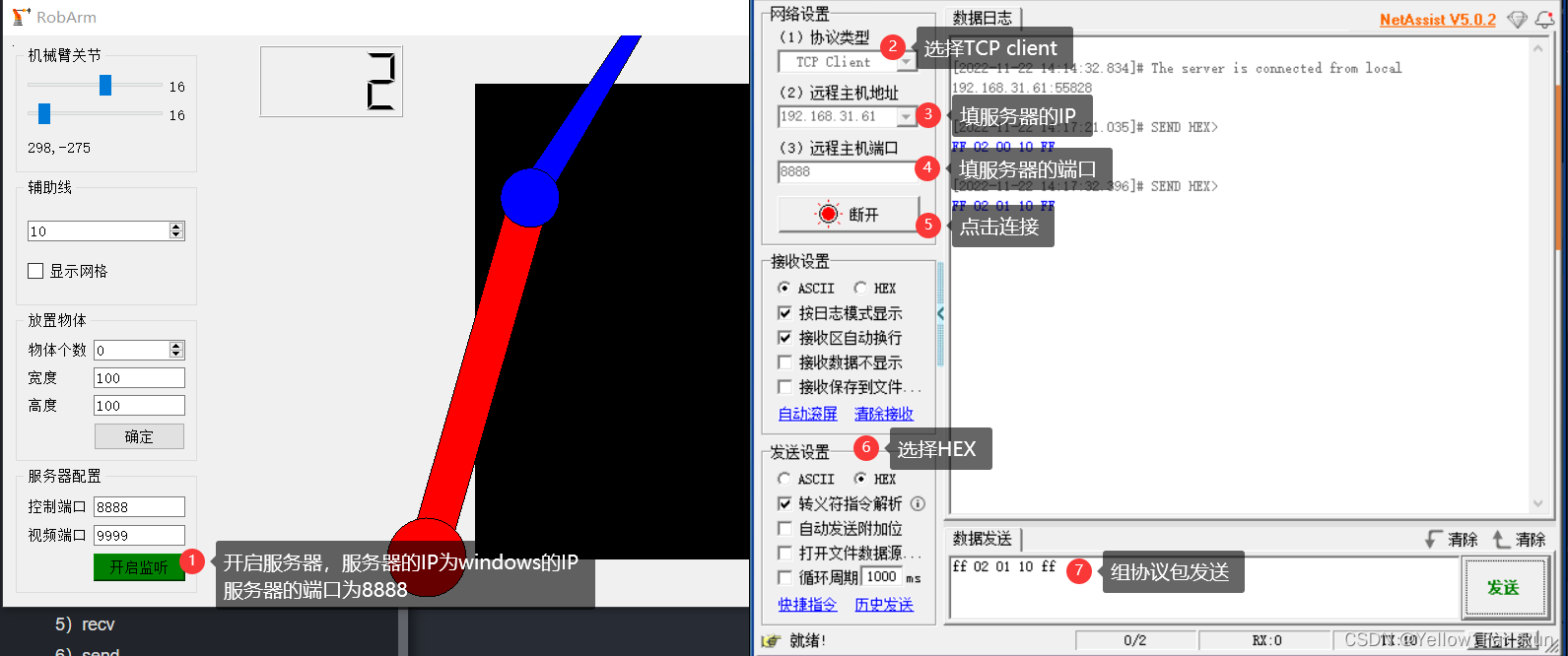
下图所示,关节2为无动力旋转关节,关节4为无动力移动关节,关节5为旋转关节,差速轮可绕轮中心点4自由旋转,差速轮带动2和4关节运动。设计差速轮和机械臂解算方法,使其相互配合到达接收口,瞄准目标位置。

解算过程:先当成机械臂进行求解,然后再求解差速轮轨迹。
效果:
两轮差速拖动机械臂瞄准目标
下图所示,关节2为无动力旋转关节,关节4为无动力移动关节,关节5为旋转关节,差速轮可绕轮中心点4自由旋转,差速轮带动2和4关节运动。设计差速轮和机械臂解算方法,使其相互配合到达接收口,瞄准目标位置。
解算过程:先当成机械臂进行求解,然后再求解差速轮轨迹。
效果:
两轮差速拖动机械臂瞄准目标































![[渗透测试] 反序列化漏洞](https://i-blog.csdnimg.cn/direct/5fdf6fa04ae94ec0ac458e1c487a6d14.png#pic_center)