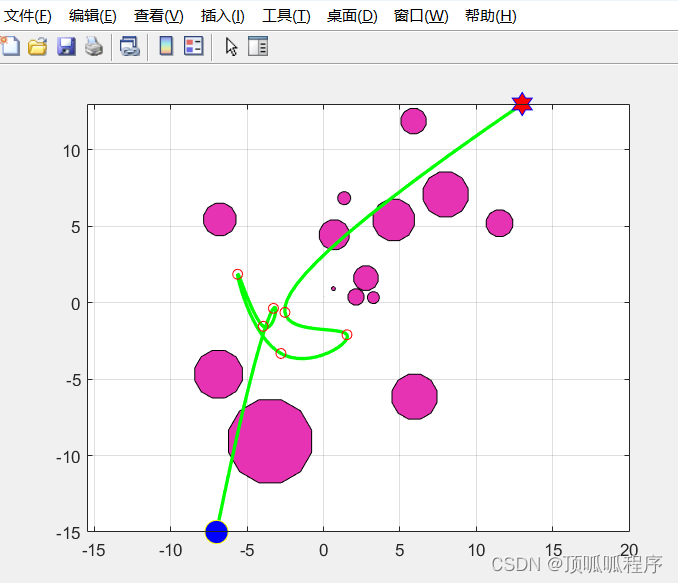
人工势场法(Artificial Potential Field Method)是一种常用的路径规划技术,特别适用于移动机器人在复杂环境中的导航。它利用一种模拟物理力场的方式来指导机器人移动,从而避开障碍物并到达目标点。下面是人工势场法的基本概念和实现步骤。
基本概念
吸引势场(Attractive Potential Field):
- 吸引势场指的是引导机器人朝向目标的力场。这个力场的大小和方向通常与目标点与机器人之间的距离有关。
- 吸引势场的公式通常是 𝑈𝑎𝑡𝑡(𝑥)=12𝑘𝑎𝑡𝑡∥𝑥−𝑥𝑔𝑜𝑎𝑙∥2Uatt(x)=21katt∥x−xgoal∥2,其中 𝑘𝑎𝑡𝑡katt 是吸引力系数, 𝑥𝑔𝑜𝑎𝑙xgoal 是目标位置。
排斥势场(Repulsive Potential Field):
- 排斥势场用来避开障碍物。它产生的力会推动机器人远离障碍物。
- 排斥势场的公式通常是 𝑈𝑟𝑒𝑝(𝑥)=12𝑘𝑟𝑒𝑝(1∥𝑥−𝑥𝑜𝑏𝑠∥−1𝑑0)2Urep(x)=21krep(∥x−xobs∥1−d01)2 ,其中 𝑘𝑟𝑒𝑝krep 是排斥力系数, 𝑑0d0 是排斥势场的影响范围, 𝑥𝑜𝑏𝑠xobs 是障碍物的位置。
总势场:
- 总势场是吸引势场和排斥势场的加权和,机器人在每个时间步骤会根据总势场的梯度来决定移动方向。
实现步骤
定义势场函数:
- 计算吸引势场和排斥势场的函数。
计算力:
- 从当前机器人位置计算吸引力和排斥力。
更新位置:
- 根据计算出的总力更新机器人的位置。
循环迭代:
- 持续执行更新过程直到机器人到达目标点或者满足其他停止条件。
示例代码
下面是一个使用 C++ 实现的人工势场法路径规划的简化示例代码:
#include <iostream>
#include <vector>
#include <cmath>
struct Vector2 {
float x, y;
Vector2() : x(0), y(0) {}
Vector2(float x, float y) : x(x), y(y) {}
Vector2 operator-(const Vector