文章目录
概要
尽管YOLO(You Only Look Once)系列的对象检测器在效率和实用性方面表现出色,但它们通常只能检测预定义的对象类别,这限制了它们在更开放场景中的应用。
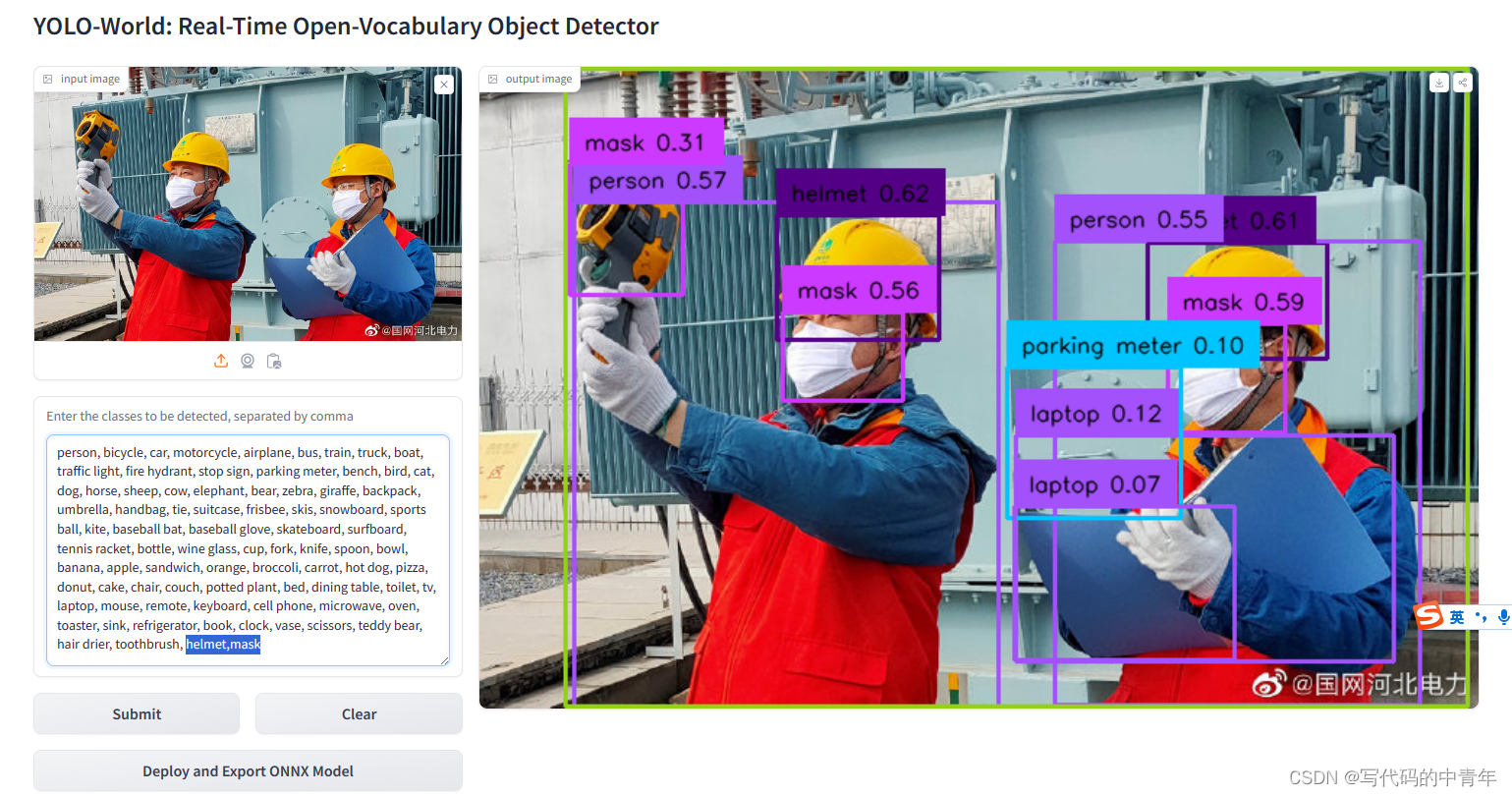
为了克服这一限制,作者提出了YOLO-World,这是一种新的方法,它通过视觉-语言建模和在大规模数据集上的预训练,增强了YOLO的开放词汇(open-vocabulary)检测能力。开放词汇检测指的是能够检测并识别在训练阶段未见过的对象类别。
下面我们对Yolo-World模型的网络结构及其原理进行详细分析。
一、整体架构分析
YOLO检测器:
(1)Darknet Backbone:YOLO-World基于YOLOv8,使用Darknet作为其图像编码器。Darknet是一个深度卷积神经网络,能够提取图像的多尺度特征。
(2)特征金字塔网络(FPN):通过路径聚合网络(PAN),YOLO-World构建了一个特征金字塔,将不同尺度的特征图进行融合,增强了模型对不同大小目标的检测能力。文本编码器:
-CLIP Text Encoder:YOLO-World利用预训练的CLIP文本编码器将输入文本(如类别名称、名词短语或对象描述)编码为文本嵌入。CLIP是一个视觉-语言预训练模型,能够将文本和图像特征映射到同一语义空间。RepVL-PAN(Re-parameterizable Vision-Language Path Aggregation Network):
(1)Text-guided CSPLayer:在特征金字塔的每个阶段,YOLO-World通过Text-guided CSPLayer将文本特征注入到图像特征中。具体来说,它使用文本嵌入和图像特征的点积,并通过sigmoid函数进行归一化,然后将结果与图像特征相乘,实现文本对图像特征的引导。
(2)Image-Pooling Attention:为了增强文本嵌入的图像意识,YOLO-World通过Image-Pooling Attention聚合图像特征。它使用最大池化操作从多尺度特征中提取关键区域,并将这些区域的特征通过多头注意力机制映射回文本嵌入。区域-文本对比损失(Region-Text Contrastive Loss):
在训练过程中,YOLO-World通过区域-文本对比损失来优化模型。这种损失函数通过计算预测的边界框和文本嵌入之间的相似度,以及预测和真实标注之间的一致性,来训练模型识别和定位目标。推理策略:
(1)在线词汇表训练:在训练阶段,YOLO-World构建在线词汇表,包含正面和负面名词,以增强模型对大型词汇表对象的识别能力。
(2)离线词汇表推理:在推理阶段,YOLO-World采用“提示-检测”范式。用户可以定义自定义提示,然后通过文本编码器编码这些提示以获得离线词汇表嵌入。这些嵌入可以重参数化为RepVL-PAN中的权重,从而提高推理效率。
二、详细结构分析
1.YOLO检测器
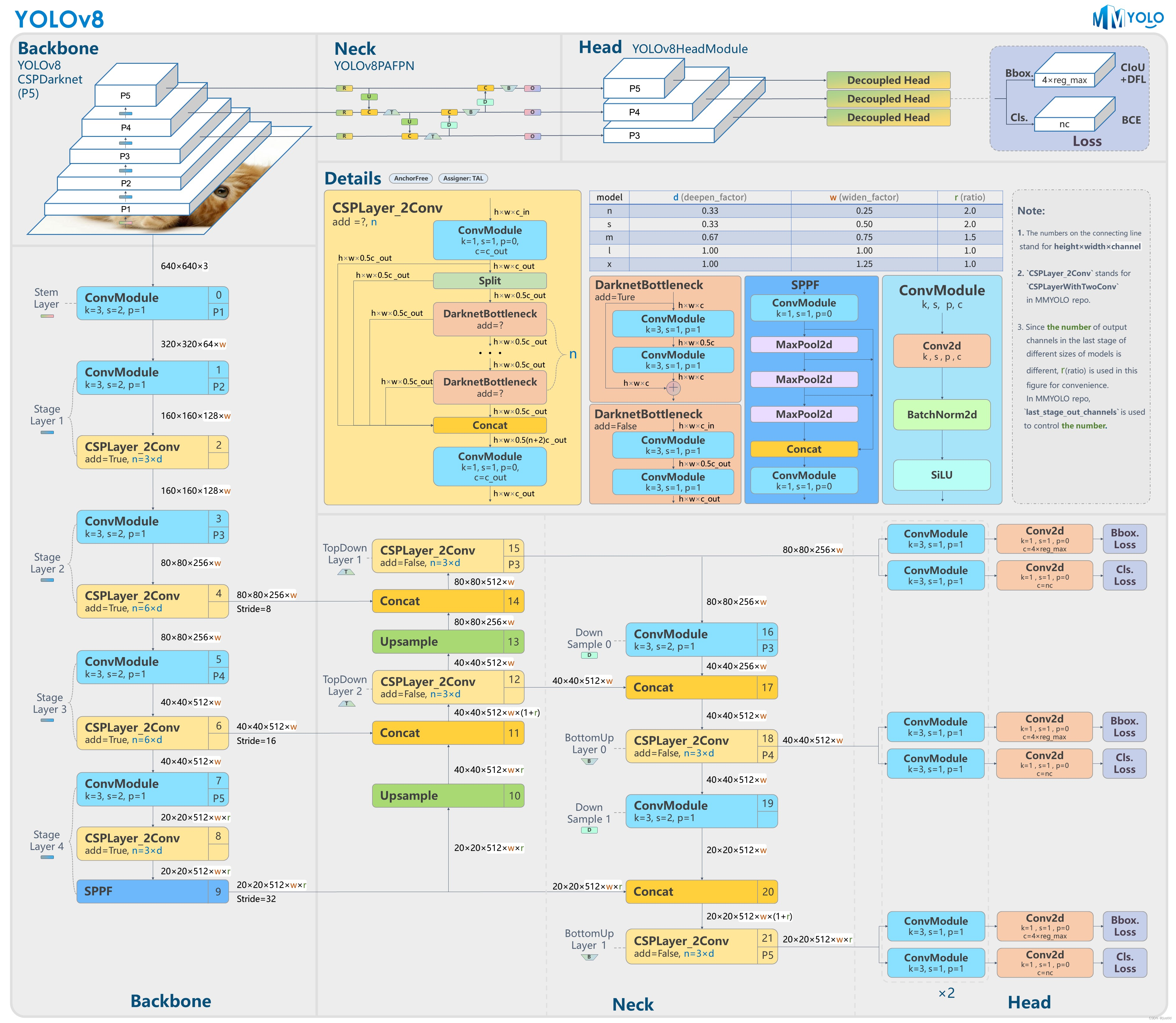
结合网络模型结构图以及代码分析一下yoloV8的网络结构

# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2 第0层:使用64个3x3的卷积核,步幅为2进行卷积,得到P1/2特征图。
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4 第1层:使用128个3x3的卷积核,步幅为2进行卷积,得到P2/4特征图,
- [-1, 3, C2f, [128, True]] # 第2层:进行3次C2f操作,每次操作使用128个通道,最后一次操作使用降维(True)。
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8 第3层:使用256个3x3的卷积核,步幅为2进行卷积,得到P3/8特征图。
- [-1, 6, C2f, [256, True]] #第4层:进行6次C2f操作,每次操作使用256个通道,最后一次操作使用降维(True)。
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16 第5层:使用512个3x3的卷积核,步幅为2进行卷积,得到P4/16特征图。
- [-1, 6, C2f, [512, True]] #第6层:进行6次C2f操作,每次操作使用512个通道,最后一次操作使用降维(True)
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32 第7层:使用1024个3x3的卷积核,步幅为2进行卷积,得到P5/32特征图。
- [-1, 3, C2f, [1024, True]] #第8层:进行3次C2f操作,每次操作使用1024个通道,最后一次操作使用降维(True),
- [-1, 1, SPPF, [1024, 5]] # 9 第9层:使用1024个通道的SPPF(空间金字塔池化)层,使用5个不同大小的池化核进行池化操作。
1.1 Backbone
(1)第0层:输入640×640×3大小的图像,使用3×3的卷积核,步幅为2,padding为1进行卷积,得到P1特征图。这里卷积的过程可以看到图示1:首先进行一次普通卷积,然后是batchNormalization归一化,最后进行的是SiLU激活函数引入非线性关系,得到320×320×64大小的图像;
(2)第1层:重复上一步过程使用128个3x3的卷积核,步幅为2进行卷积,得到P2特征图,得到160×160×128大小的图像,尺寸减半通道数加倍,通道数等于卷积核数;
(3)第2层:进行3次C2f操作图示2,每次操作使用128个通道,最后一次操作使用降维(True)。这里C2f模块接收来自上一步卷积得到的160×160×128大小的图像,首先进行一次Conv卷积,然后把输出的图像进行split切分为两份,其中一份通道数减半传到最后进行Concat操作,另一份通道数减半进入BottleNeck部分(图示3),这里需要接收参数shortcut=True or False,如果参数是True,那么就在BottleNeck中进行一次shortcut操作,也就是残差连接(这个概念可以参考resnet论文),每次BottleNeck之后都将一半的数据直接传入网络最后,另一半数据再进行一次BottleNeck,BottleNeck进行多少次取决于C2f进行多少次,也就是最开始的参数n,最后将前边处理得到的图像数据进行concat连接,这时的通道数为0.5×(n+2),在进行一次Conv卷积,将通道数变为split分割之前的通道数,也就是经过C2f模块尺寸和通道数并不会产生改变,此时输出图像尺寸为160×160×128;
(4)第3层:使用256个3x3的卷积核,padding为1,步幅为2进行卷积,得到P3特征图,此时输出图片尺寸为80×80×256。
(5)第4层:进行6次C2f操作,每次操作使用256个通道,最后一次操作使用降维(True)。此时输出图片尺寸为80×80×256。
(6)第5层:使用512个3x3的卷积核,padding为1,步幅为2进行卷积,得到P4/特征图。此时图片尺寸为40×40×512。
(7)第6层:进行6次C2f操作,每次操作使用512个通道,最后一次操作使用降维(True),此时输出图片尺寸为40×40×512。
(8)第7层:使用1024个3x3的卷积核,padding为1,,步幅为2进行卷积,得到P5特征图。此时图片尺寸为20×20×1024。
(9)第8层:进行3次C2f操作,每次操作使用1024个通道,最后一次操作使用降维(True),此时图片尺寸为20×20×1024。
(10)第9层:使用1024个通道的SPPF(空间金字塔池化)层,使用5个(代码中是5个,图片中是3个)不同大小的池化核进行池化操作。池化金字塔中先接收来自上一层的图像输入,首先进行一次卷积调整输入特征的通道数,为后续的池化操作做准备;然后进行三次最大池化,不同池化窗口如1x1、3x3、5x5等,用于捕获不同尺度的上下文信息;最后进行特征图拼接,拼接后的特征图再次通过一个1x1卷积层,以整合不同尺度的特征,得到最终的输出,此时图片尺寸为20×20×1024。
至此backbone部分结束,下边接收head部分。
1.2 Head
Head部分主要进行不同尺寸图像信息的融合,以便更好的获得图像特征并且进行目标检测。
(1)第10层:这里接收的图像为第9层的输出尺寸为20×20×1024,使用最近邻上采样(nn.Upsample)将特征图尺寸放大两倍,以便进行更细粒度的特征提取或与不同分辨率的特征图进行融合。其核心思想是将每个像素点复制到其周围的像素点,从而实现尺寸的放大,此时输出尺寸为40×40×1024。
(2)第11层:将backbone第6层提取的特征图与Upsample放大后的特征图进行拼接(Concat),生成新的特征图,此时输出尺寸为40×40×1024。
(3)第12层:进行3次C2f操作,在BottleNeck中不进行残差链接,此时输出尺寸为40×40×1024。
(4)第13层:同第10层操作一样,使用最近邻上采样将特征图尺寸放大两倍。此时输出尺寸为80×80×1024。
(5)第14层:将backbone第4层提取的特征图,与第13层放大后的特征图进行拼接,生成新的特征图,此时输出尺寸为80×80×1536
(6)第15层:进行3次C2f操作,不进行残差链接;
(7)后续的第16,17,18,19,20,21层进行10~15层的倒序操作,也就是通过conv操作缩小尺寸,将80×80的特征图变成20×20的特征图,并且在过程中进行C2f模块操作,concat操作拼接前边层的特征图,更好的进行特征融合,获取图片的上下文信息,最终获取到三个尺寸特征图输出,也就是80×80×1024,40×40×1024,20×20×1024,这样三个尺寸的特征图便可以检测不同大小的目标,并且含有丰富的语义特征,获取到这三个尺寸的特征图便完成了yolo-world网络模型结构中的yolo获取特征图的部分,后续还有进行边界框回归的部分,留在后边进行说明;
----------------------------------分割线-------------------------------------
此部分如果有写的不对的地方请各位在评论中指出,我会认真修改,感谢各位大佬!
1.3 各模块的过程和作用
图示1 卷积模块过程

Conv卷积模块
如图是一个典型的卷积神经网络(CNN)层的卷积过程,其中包括卷积层(Conv)、批量归一化层(BatchNorm2d)和激活函数(SiLU)
(1)卷积层(Conv):
- 核大小(k):卷积核的尺寸,通常用 ( k \times k ) 表示。
- 步长(s):卷积时滑动的步长,步长为1意味着每次滑动一个像素。
- 填充(p):卷积核边缘的填充大小,填充为0通常意味着没有额外的填充。
- 输出通道数(c):卷积层输出特征图的通道数。
(2)卷积操作(Conv2d): - 卷积操作是深度学习中的基本操作之一,用于提取图像的局部特征。
- 在二维卷积(Conv2d)中,卷积核在输入特征图的每个位置滑动,并计算卷积核与输入特征图对应部分的点积,生成新的输出特征图。
(3)批量归一化层(BatchNorm2d): - 批量归一化是一种技术,用于加速训练过程并提高模型的稳定性。
- 它通过规范化(归一化)层的输入来减少内部协变量偏移(即不同训练样本的尺度和分布差异)。
- BatchNorm2d通常在卷积层之后应用,对每个特征通道的输出进行归一化处理。
(4)激活函数(SiLU): - SiLU(Sigmoid线性单元)是一种非线性激活函数;
- 它将输入特征图的每个元素通过SiLU函数进行非线性变换,增加网络的非线性表达能力。
(5)整体流程: - 输入特征图首先通过卷积层,卷积核在特征图上滑动,提取局部特征。
- 卷积后的输出特征图通过批量归一化层进行归一化处理,减少不同批次数据的分布差异。
- 最后,归一化后的特征图通过SiLU激活函数进行非线性变换,生成最终的输出特征图。
图示2 C2F结构展示

C2F模块
(1)输入特征:模块接收尺寸为 h×w、通道数为 c_in 的特征图。
(2)1x1卷积:
特征图通过一个核大小为1(k=1)、步长为1(s=1)、填充为0(p=0)的卷积层,输出通道数为 c_out。
(3)通道分割:
输出特征图被分割成两个子特征图,每个子特征图的通道数为 c_out/2。
(4)瓶颈层(Bottleneck):
每个子特征图通过瓶颈层进行处理,瓶颈层通常包含深度可分离卷积或其他轻量化的卷积操作,以减少计算量并提取特征。
(5)跨阶段连接(Cross-stage Connections):
在瓶颈层之后,特征图的尺寸减半,但通道数保持不变。图片中的 “shortcut=?” 表示这里存在某种形式的残差连接或跳跃连接,具体细节见下边BottleNeck解释。
(6)特征拼接(Concatenation):
处理后的两个子特征图被拼接回一起,得到尺寸为 h×w、通道数为c_out/2×(n + 2)的特征图,其中n是一个与模块设计相关的参数。
(7)最终1x1卷积:
最后,拼接后的特征图再次通过一个1x1卷积层,输出最终的特征图,尺寸保持不变,通道数为c_out。
(8)C2F输出:
C2F模块的输出是经过这些处理步骤后的特征图,这些特征图具有增强的特征表示能力,可以用于后续的目标检测任务。
C2F模块的设计意图是通过轻量化的卷积操作和特征融合,提高网络的计算效率和特征提取能力。这种模块可能在YOLOv8的多个地方使用,以确保在不同尺度的特征图中都能有效地提取有用的信息。 “shortcut” 指的是残差连接,用于帮助网络学习输入和输出之间的残差,从而提高网络的学习能力和稳定性。
图示3 BottleNeck模块

BottleNeck模块
Bottleneck模块是一种常见的网络结构,用于减少参数数量和计算量,同时保持或提升特征表达能力。以下是Bottleneck模块的两种变体的过程介绍:
(1)输入特征:模块接收尺寸为 h×w、通道数为 c的特征图。
(2)第一个3x3卷积:
特征图首先通过一个核大小为3( k=3)、步长为1( s=1)、填充为1( p=1)的卷积层。
(3)第二个3x3卷积:
紧接着,输出特征图再次通过一个相同配置的3x3卷积层。
(4)Shortcut连接:
由于shortcut=True,原始输入特征图与经过两个卷积层的输出特征图进行相加。这允许梯度直接从输出传递回输入,有助于解决深层网络中的梯度消失问题。
(5)输出特征:
最终输出的特征图尺寸仍为 h×w,通道数保持不变为c。
对于不带Shortcut的Bottleneck模块:只进行两次卷积过程后输出特征,不进行shortcut连接
注:shortcut通用特点:
- 深度和参数效率:Bottleneck模块通过先压缩后扩展的卷积操作,减少了参数数量和计算量。
- 特征不变性:带Shortcut的Bottleneck模块通过残差连接保持了输入和输出的尺寸和通道数不变。
- 计算效率:使用3x3卷积可以在减少特征图尺寸的同时,捕获足够的局部空间信息。
- 适用性:Bottleneck模块常用于深度学习网络中,尤其是在需要处理高分辨率输入时,如图像分类和目标检测任务。
图示4 SPPF过程
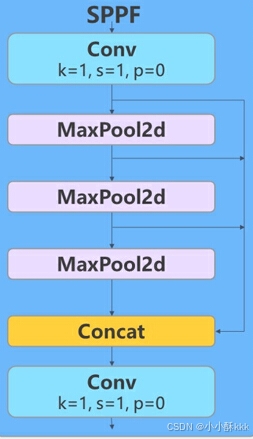
SPPF模块
一种改进的空间金字塔池化模块。
(1)输入特征:
模块接收尺寸为 h×w、通道数为 c的特征图。
(2)1x1卷积:
首先,特征图通过一个1x1卷积层,核大小为1( k=1)、步长为1( s=1 )、填充为0(p=0)。这个卷积层可以调整输入特征的通道数,为后续的池化操作做准备。
(3)空间金字塔池化(Spatial Pyramid Pooling):
接着,特征图经过三次不同的最大池化操作(MaxPool2d)。这些池化操作通常具有不同的窗口大小,例如1x1、3x3、5x5等,用于捕获不同尺度的上下文信息。
每个最大池化层都会在特征图上应用一个固定大小的窗口,并输出该窗口内的最大值,这有助于提取多尺度的特征。
(4)特征图拼接(Concatenation):
池化操作后,得到的多个不同尺度的特征图被拼接在一起。这样,网络就可以在后续层中同时考虑到局部特征和全局上下文信息。
(5)最终1x1卷积:
最后,拼接后的特征图再次通过一个1x1卷积层,以整合不同尺度的特征,并输出最终的特征图。
(6)SPPF输出:
SPPF模块的输出是一个综合了多尺度信息的特征图,这个特征图可以提供更丰富的上下文信息,有助于提高目标检测的准确性。
SPPF模块是通过多尺度的池化操作捕获图像中的全局和局部特征,然后将这些特征有效地融合在一起。这种模块在目标检测网络中非常有用,因为它可以帮助模型更好地理解不同尺寸的物体,从而提高检测性能。
Upsampling模块
在深度学习中,上采样(Upsampling)是一种常用的技术,用于将特征图的尺寸放大,以便进行更细粒度的特征提取或与不同分辨率的特征图进行融合。最近邻上采样(Nearest Neighbor Upsampling)是一种简单的上采样方法,其核心思想是将每个像素点复制到其周围的像素点,从而实现尺寸的放大。
以下是使用最近邻上采样将特征图尺寸放大两倍的基本步骤:
(1)确定上采样的尺寸:
- 假设原始特征图的尺寸为 h×w×c
- 目标是将特征图的尺寸放大两倍,因此新的尺寸将是2h×2w
(2)应用最近邻上采样: - 对于每个像素点 (x,y) 在原始特征图中,复制其值到新特征图中的(2x,2y)位置。
- 这样,每个像素点在水平和垂直方向上都会被复制一次,从而实现尺寸的放大。
(3)填充边缘: - 在新特征图的边缘,可能没有足够的像素点可以复制。在这种情况下,可以选择复制最近的像素点,或者简单地复制最后一个像素点。
(4)实现代码: - 在PyTorch中,可以使用
nn.Upsample模块来实现最近邻上采样。以下是一个示例代码:
import torch
import torch.nn as nn
# 定义原始特征图
original_feature_map = torch.randn(1, 3, 10, 10) # 假设有3个通道,10x10的尺寸
# 创建上采样模块,模式为最近邻
upsample = nn.Upsample(scale_factor=2, mode='nearest')
# 应用上采样
upscaled_feature_map = upsample(original_feature_map)
# 打印结果
print("Original Feature Map Shape:", original_feature_map.shape)
print("Upsampled Feature Map Shape:", upscaled_feature_map.shape)
Concat模块
在深度卷积神经网络中,concat模块用于将来自不同层或不同尺度的特征图在通道维度上进行拼接。这种操作有助于融合多层次、多尺度的信息,从而增强模型的特征表达能力和检测性能。
(1)特征提取:从不同的网络层提取特征图,这些特征图可能来自不同的卷积层或不同的检测头。
(2)尺寸匹配:对特征图进行尺寸调整,使它们在空间维度上具有相同的宽度和高度。
(3)拼接操作:在通道维度上将这些特征图拼接在一起,形成一个新的特征图。
concat模块主要用于以下几个方面:
(1)特征融合:将来自不同尺度的特征图拼接在一起,以提高模型对不同大小目标的检测能力。
(2)跨层连接:将低层的细节特征与高层的语义特征结合起来,增强模型的特征表达能力。
(3)多任务学习:在多任务学习场景中,concat模块可以将来自不同任务的特征图拼接在一起,进行联合训练。