目录
一、基本概念
何为定时器?
主要功能就是接收输入信号,以一定频率计数,再输出信号(触发中断)。在stm32当中,以此为基础,集成了多种功能,如:内、外时钟源选择,输入捕获,输出比较,编码器,PWM波输出等。
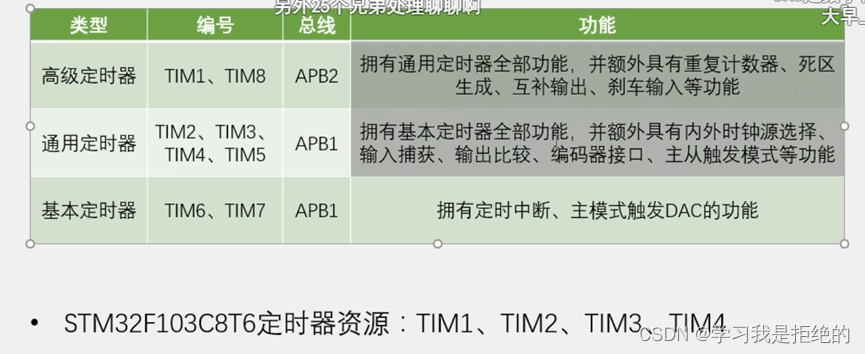
STM32中定时器分类:
参考:
1、https://zhuanlan.zhihu.com/p/648584916
2、https://blog.csdn.net/zs3194068129/article/details/137357092

1、常规定时器
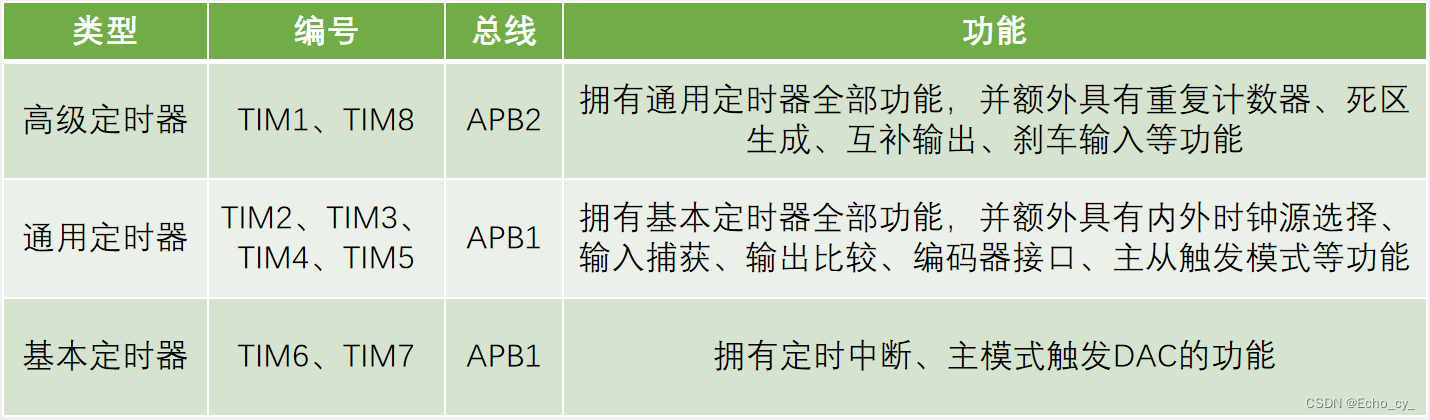
其中,STM32F1 系列中,除了互联型的产品,共有 8个常规定时器,分为基本定时器,通用定时器和高级定时器。
基本定时器: TIM6 和 TIM7 是一个 16位的只能向上计数的定时器,只能定时,没有外部 IO。
通用定时器 :TIM2/3/4/5是一个 16位的可以向上/下计数的定时器,可以定时,可以输出比较,可以输入捕捉,
每个定时器有四个外部IO。高级定时器: TIM1/8是一个 16位的可以向上/下计数的定时器,可以定时,可以输出比较,可以输入捕捉,还可以有三相电机互补输出信号,每个定时器有8 个外部 IO。
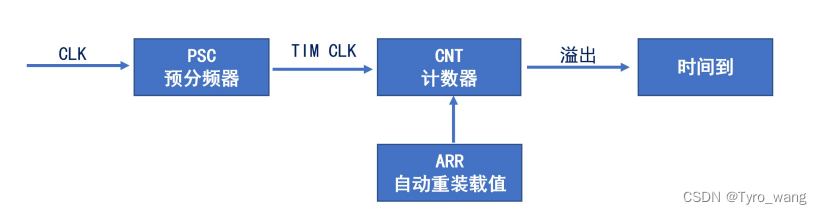
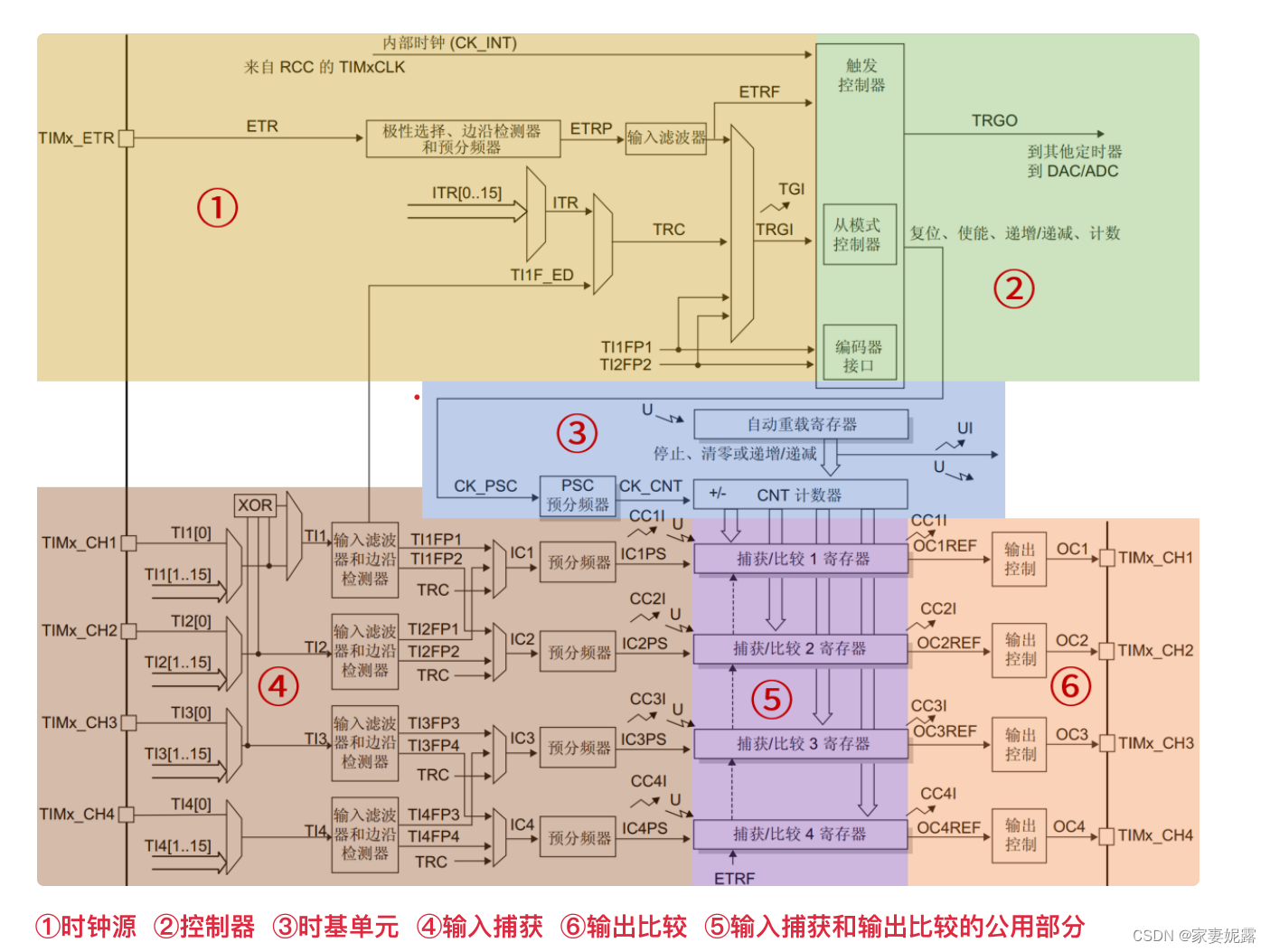
 基本原理:
基本原理:

自动重装载寄存器 ARR:是一个比较影子寄存器,用来存储程序中某个变量或寄存器的值,然后将其与其他变量或寄存器的值进行比较的寄存器。
溢出条件:CNT==ARR(影子寄存器中的值)、或0、或ARR-1、1;

2、内核定时器
XXX
二、基本定时器实验
1、实验说明
本实验利用基本定时器 TIM6/7 定时 1s,1s 时间到 LED 翻转一次。基本定时器是单片机内部的资源, 没有外部 IO,不需要接外部电路,现只需要一个 LED 即可。
基本原理
利用一个基本定时器(如TIM6),通过中断事件设置一个单位定时器(如1ms),主函数利用单位计时器实现LED灯定时翻转。
编程思路
1、配置LED灯;
2、配置定时器;
3、设定中断事件配置1ms的单位计时器;
4、主函数中利用1ms的单位计时器开始计数,当计数到1000时LED翻转一次。
2、编程过程
(1)配置LED
(2)配置定时器
定时器配置参数(以TIM6为例):
//1、TIM6时钟配置
#define BASIC_TIM TIM6//使用时钟
#define BASIC_TIM_APBxClock_FUN RCC_APB1PeriphClockCmd//APB1时钟启动函数
#define BASIC_TIM_CLK RCC_APB1Periph_TIM6//APB1_TIM6内部时钟CK_INT=72M
#define BASIC_TIM_IRQ TIM6_IRQn//定时器TIM6
#define BASIC_TIM_IRQHandler TIM6_IRQHandler
//2、基本定时器参数配置
#define BASIC_TIM_Prescaler 71//时钟预分频数,则驱动计数器的时钟CK_CNT = CK_INT / (71+1)=1M;可设置范围为0至65535,实现1至65536分频
#define BASIC_TIM_Period 1000-1//自动重装载寄存器周的值(计数值),则1s/1MHz*1000=1ms,可设置范围为0至65535;累计TIM_Period个频率后产生一个更新或者中断
定时器配置函数:
//3、基本定时器模式配置
static void BASIC_TIM_Mode_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//时钟结构体
BASIC_TIM_APBxClock_FUN(BASIC_TIM_CLK, ENABLE);// 开启内部定时器时钟
TIM_TimeBaseStructure.TIM_Period = BASIC_TIM_Period;// 自动重装载寄存器的值:1000-1
TIM_TimeBaseStructure.TIM_Prescaler= BASIC_TIM_Prescaler;// 时钟预分频数:72-1
//TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;// 时钟分频因子 ,基本定时器没有,不用管
//TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; // 计数器计数模式,基本定时器只能向上计数,没有计数模式的设置
//TIM_TimeBaseStructure.TIM_RepetitionCounter=0;// 重复计数器的值,基本定时器没有,不用管
TIM_TimeBaseInit(BASIC_TIM, &TIM_TimeBaseStructure);// 初始化定时器
TIM_ClearFlag(BASIC_TIM, TIM_FLAG_Update);// 清除计数器中断标志位
TIM_ITConfig(BASIC_TIM,TIM_IT_Update,ENABLE);// 开启计数器中断
TIM_Cmd(BASIC_TIM, ENABLE); // 使能计数器
}
(3)设定中断事件
当TIM6累计TIM_Period个频率后就会产生一个中断执行中断程序
中断配置函数:
// dym4:中断优先级配置
static void BASIC_TIM_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);// 设置中断组为0
NVIC_InitStructure.NVIC_IRQChannel = BASIC_TIM_IRQ ;// 设置中断来源:TIM6_IRQn
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;// 设置主优先级为0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //配置子优先级为:3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能中断通道
NVIC_Init(&NVIC_InitStructure);
}
中断执行函数:
//dym5:中断执行函数
void BASIC_TIM_IRQHandler (void)
{
if ( TIM_GetITStatus( BASIC_TIM, TIM_IT_Update) != RESET ) //按本文的设置1ms触发一次
{
time++;//main函数的全局变量
TIM_ClearITPendingBit(BASIC_TIM , TIM_FLAG_Update); //把相应的中断标志位清除掉,切记
}
}
(4)主函数计数
设置全局变量time,定时器1ms,若实现1s转换一次LED灯,则time计数到1000
volatile uint32_t time = 0; // ms 计时变量
int main(void)
{
/* led 端口配置 */
LED_GPIO_Config();
/* Time 端口配置 */
BASIC_TIM_Init();
while(1)
{
if ( time == 1000 ) /* 1000 * 1 ms = 1s 时间到 */
{
time = 0;
/* LED1 取反 */
LED1_TOGGLE;
}
}
}
3、工程代码
三、通用定时器实验
实验一:常规计时
1、实验说明
本实验利用基本定时器 TIM2/3/4/5 定时 1s,1s 时间到 LED 翻转一次。基本定时器是单片机内部的资源, 没有外部 IO,不需要接外部电路,现只需要一个 LED 即可。
2、编程过程
(1)配置LED
(2)配置定时器
定时器配置参数:
/**************通用定时器TIM参数定义,只限TIM2、3、4、5************/
// 当需要哪个定时器的时候,只需要把下面的宏定义改成1即可
#define GENERAL_TIM2 1
#define GENERAL_TIM3 0
#define GENERAL_TIM4 0
#define GENERAL_TIM5 0
#if GENERAL_TIM2
//1、TIM6时钟配置
#define GENERAL_TIM TIM2//使用时钟
#define GENERAL_TIM_APBxClock_FUN RCC_APB1PeriphClockCmd//APB1时钟启动函数
#define GENERAL_TIM_CLK RCC_APB1Periph_TIM2//APB1_TIM2内部时钟CK_INT=72M
#define GENERAL_TIM_IRQ TIM2_IRQn//定时器TIM6
#define GENERAL_TIM_IRQHandler TIM2_IRQHandler
//2、基本定时器参数配置
#define GENERAL_TIM_Prescaler 71//时钟预分频数,则驱动计数器的时钟CK_CNT = CK_INT / (71+1)=1M;可设置范围为0至65535,实现1至65536分频
#define GENERAL_TIM_Period (1000-1)//自动重装载寄存器周的值(计数值),则1s/1MHz*1000=1ms,可设置范围为0至65535;累计TIM_Period个频率后产生一个更新或者中断
#elif GENERAL_TIM3
#define GENERAL_TIM TIM3
#define GENERAL_TIM_APBxClock_FUN RCC_APB1PeriphClockCmd
#define GENERAL_TIM_CLK RCC_APB1Periph_TIM3
#define GENERAL_TIM_Period (1000-1)
#define GENERAL_TIM_Prescaler 71
#define GENERAL_TIM_IRQ TIM3_IRQn
#define GENERAL_TIM_IRQHandler TIM3_IRQHandler
#elif GENERAL_TIM4
#define GENERAL_TIM TIM4
#define GENERAL_TIM_APBxClock_FUN RCC_APB1PeriphClockCmd
#define GENERAL_TIM_CLK RCC_APB1Periph_TIM4
#define GENERAL_TIM_Period (1000-1)
#define GENERAL_TIM_Prescaler 71
#define GENERAL_TIM_IRQ TIM4_IRQn
#define GENERAL_TIM_IRQHandler TIM4_IRQHandler
#elif GENERAL_TIM5
#define GENERAL_TIM TIM5
#define GENERAL_TIM_APBxClock_FUN RCC_APB1PeriphClockCmd
#define GENERAL_TIM_CLK RCC_APB1Periph_TIM5
#define GENERAL_TIM_Period (1000-1)
#define GENERAL_TIM_Prescaler 71
#define GENERAL_TIM_IRQ TIM5_IRQn
#define GENERAL_TIM_IRQHandler TIM5_IRQHandler
#endif
定时器配置函数:
//3、通用定时器模式配置
static void GENERAL_TIM_Mode_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //时钟结构体
GENERAL_TIM_APBxClock_FUN(GENERAL_TIM_CLK, ENABLE);// 开启内部定时器时钟
TIM_TimeBaseStructure.TIM_Period=GENERAL_TIM_Period;// 自动重装载寄存器的值:1000-1
TIM_TimeBaseStructure.TIM_Prescaler= GENERAL_TIM_Prescaler;// 时钟预分频数:72-1
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;// 时钟分频因子 ,没用到不用管
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; // 计数器计数模式,设置为向上计数
TIM_TimeBaseStructure.TIM_RepetitionCounter=0;// 重复计数器的值,没用到不用管
TIM_TimeBaseInit(GENERAL_TIM, &TIM_TimeBaseStructure);// 初始化定时器
TIM_ClearFlag(GENERAL_TIM, TIM_FLAG_Update);// 清除计数器中断标志位
TIM_ITConfig(GENERAL_TIM,TIM_IT_Update,ENABLE);// 开启计数器中断
TIM_Cmd(GENERAL_TIM, ENABLE); // 使能计数器
}
(3)设定中断事件
当TIM2/3/4/5累计TIM_Period个频率后就会产生一个中断执行中断程序
中断配置函数:
// dym4:中断优先级配置
static void GENERAL_TIM_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);// 设置中断组为0
NVIC_InitStructure.NVIC_IRQChannel = GENERAL_TIM_IRQ;// 设置中断来源:TIM2/3/4/5_IRQn
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;// 设置主优先级为0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //配置子优先级为:3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能中断通道
NVIC_Init(&NVIC_InitStructure);
}
中断执行函数:
//dym5:中断执行函数
void GENERAL_TIM_IRQHandler(void)
{
if ( TIM_GetITStatus( GENERAL_TIM, TIM_IT_Update) != RESET ) //按本文的设置1ms触发一次
{
time++;//main函数的全局变量
TIM_ClearITPendingBit(GENERAL_TIM, TIM_FLAG_Update); //把相应的中断标志位清除掉,切记
}
}
(4)主函数计数
设置全局变量time,定时器1ms,若实现1s转换一次LED灯,则time计数到1000
volatile uint32_t time = 0; // ms 计时变量
int main(void)
{
/* led 端口配置 */
LED_GPIO_Config();
/* Time 端口配置 */
GENERAL_TIM_Init();
while(1)
{
if ( time == 1000 ) /* 1000 * 1 ms = 1s 时间到 */
{
time = 0;
/* LED1 取反 */
LED1_TOGGLE;
}
}
}
3、工程代码
四、高级定时器实验
实验一:常规计时
1、实验说明
本实验利用基本定时器 TIM1/8 定时 1s,1s 时间到 LED 翻转一次。基本定时器是单片机内部的资源, 没有外部 IO,不需要接外部电路,现只需要一个 LED 即可。
2、编程过程
(1)配置LED
(2)配置定时器
定时器配置参数:
/********************高级定时器TIM参数定义,只限TIM1、8************/
#define ADVANCE_TIM1 // 如果使用TIM8,注释掉这个宏即可
#ifdef ADVANCE_TIM1 // 使用高级定时器TIM1
//1、TIM1时钟配置
#define ADVANCE_TIM TIM1//使用时钟
#define ADVANCE_TIM_APBxClock_FUN RCC_APB2PeriphClockCmd//APB1时钟启动函数
#define ADVANCE_TIM_CLK RCC_APB2Periph_TIM1//APB1_TIM2内部时钟CK_INT=72M
#define ADVANCE_TIM_IRQ TIM1_UP_IRQn//定时器TIM1
#define ADVANCE_TIM_IRQHandler TIM1_UP_IRQHandler
//2、基本定时器参数配置
#define ADVANCE_TIM_Prescaler 71//时钟预分频数,则驱动计数器的时钟CK_CNT = CK_INT / (71+1)=1M;可设置范围为0至65535,实现1至65536分频
#define ADVANCE_TIM_Period (1000-1)//自动重装载寄存器周的值(计数值),则1s/1MHz*1000=1ms,可设置范围为0至65535;累计TIM_Period个频率后产生一个更新或者中断
#else // 使用高级定时器TIM8
#define ADVANCE_TIM TIM8
#define ADVANCE_TIM_APBxClock_FUN RCC_APB2PeriphClockCmd
#define ADVANCE_TIM_CLK RCC_APB2Periph_TIM8
#define ADVANCE_TIM_Period (1000-1)
#define ADVANCE_TIM_Prescaler 71
#define ADVANCE_TIM_IRQ TIM8_UP_IRQn
#define ADVANCE_TIM_IRQHandler TIM8_UP_IRQHandler
#endif
定时器配置函数:
//3、通用定时器模式配置
static void ADVANCE_TIM_Mode_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //时钟结构体
GENERAL_TIM_APBxClock_FUN(ADVANCE_TIM_CLK, ENABLE);// 开启内部定时器时钟
TIM_TimeBaseStructure.TIM_Period=ADVANCE_TIM_Period;// 自动重装载寄存器的值:1000-1
TIM_TimeBaseStructure.TIM_Prescaler= ADVANCE_TIM_Prescaler;// 时钟预分频数:72-1
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;// 时钟分频因子 ,没用到不用管
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; // 计数器计数模式,设置为向上计数
TIM_TimeBaseStructure.TIM_RepetitionCounter=0;// 重复计数器的值,没用到不用管
TIM_TimeBaseInit(ADVANCE_TIM, &TIM_TimeBaseStructure);// 初始化定时器
TIM_ClearFlag(ADVANCE_TIM, TIM_FLAG_Update);// 清除计数器中断标志位
TIM_ITConfig(ADVANCE_TIM,TIM_IT_Update,ENABLE);// 开启计数器中断
TIM_Cmd(ADVANCE_TIM, ENABLE); // 使能计数器
}
(3)设定中断事件
当TIM1/8累计TIM_Period个频率后就会产生一个中断执行中断程序
中断配置函数:
// dym4:中断优先级配置
static void GENERAL_TIM_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);// 设置中断组为0
NVIC_InitStructure.NVIC_IRQChannel = ADVANCE_TIM_IRQ;// 设置中断来源:TIM1/8_IRQn
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;// 设置主优先级为0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //配置子优先级为:3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能中断通道
NVIC_Init(&NVIC_InitStructure);
}
中断执行函数:
//dym5:中断执行函数
void ADVANCE_TIM_IRQHandler(void)
{
if ( TIM_GetITStatus( ADVANCE_TIM, TIM_IT_Update) != RESET ) //按本文的设置1ms触发一次
{
time++;//main函数的全局变量
TIM_ClearITPendingBit(ADVANCE_TIM, TIM_FLAG_Update); //把相应的中断标志位清除掉,切记
}
}
(4)主函数计数
设置全局变量time,定时器1ms,若实现1s转换一次LED灯,则time计数到1000
volatile uint32_t time = 0; // ms 计时变量
int main(void)
{
/* led 端口配置 */
LED_GPIO_Config();
/* Time 端口配置 */
ADVANCE_TIM_Init();
while(1)
{
if ( time == 1000 ) /* 1000 * 1 ms = 1s 时间到 */
{
time = 0;
/* LED1 取反 */
LED1_TOGGLE;
}
}
}























![[计算机网络] VPN技术](https://i-blog.csdnimg.cn/direct/680408b1369446a49e03d2892e23be87.png#pic_center)









