FPV(First Person View)穿越机,是指通过第一人称视角来驾驶的无人机,特别强调速度和灵活性,常常用于竞赛、航拍和探索等领域。结合多旋翼设计和VR眼镜,FPV穿越机为用户提供了身临其境的飞行体验。
多旋翼技术
1. 动力系统:
- 多旋翼无人机通常由4、6、8等偶数个旋翼组成,为穿越机提供稳定且灵活的动力支持。
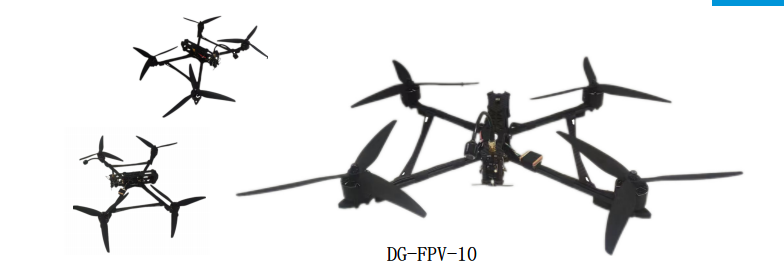
- 对于10寸FPV穿越机,一般会采用高性能的电机和螺旋桨,以保证高速飞行时的稳定性和操控性。
2. 飞行控制:
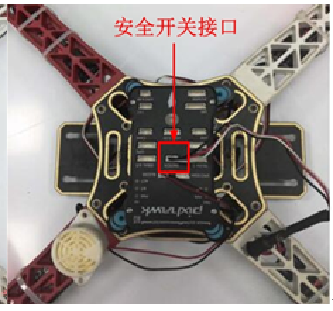
- 穿越机使用先进的飞行控制系统(如Pixhawk等),实现高精度的飞行控制和自主导航。
- 通过遥控器或地面站软件,用户可以轻松控制穿越机的飞行轨迹和动作。
VR眼镜技术
1. 视觉体验:
- VR眼镜通过头戴式显示设备将无人机的第一人称视角实时传输给用户,让用户感觉像是自己正在飞行一样。
- 配合高质量的屏幕和高刷新率,VR眼镜可以提供清晰、流畅的飞行画面。
2. 交互方式:
- VR眼镜通常配备头控或手柄等交互设备,用户可以通过简单的头部移动或手柄操作来控制穿越机的飞行。
- 一些高端的VR眼镜还支持语音控制和手势识别,进一步提高用户的使用体验。
FPV穿越机与VR眼镜的结合
1. 技术集成:
- 将FPV穿越机与VR眼镜进行技术集成,使得用户在戴上VR眼镜后就可以直接体验无人机的飞行视角。
- 这需要一套高效、稳定的图像传输系统(如DJI FPV数字图传系统等),以确保实时、高清的飞行画面传输。
2. 飞行体验:
- 通过VR眼镜,用户可以身临其境地感受到穿越机在高速飞行时的刺激和快感。
- 结合多旋翼技术,FPV穿越机可以在狭小空间中灵活穿梭,为用户提供前所未有的飞行体验。
10寸大小,大载重,长航时,远距离的飞行穿越机。具有体积小,操控灵活,飞行稳定,维护简单,遥控器适配广泛等特点。图传性能稳定,不易受到外界干扰,并带有GPS卫星定位,具有自动返航功能。

多旋翼+VR眼镜的10寸FPV穿越机技术为用户提供了极致的飞行体验。通过先进的技术集成和高质量的硬件设备,用户可以像真正的飞行员一样操控无人机,在虚拟世界中畅游天际。