什么是FreeRTOS
FreeRTOS 是一个轻量级的实时操作系统(RTOS),由 Richard Barry 在 2003 年开发,并且由亚马逊的 FreeRTOS 项目(一个由 Amazon Web Services (AWS) 支持的开源项目)进一步推动和发展。FreeRTOS 专为嵌入式系统而设计,旨在提供任务管理、时间管理、同步(信号量、互斥锁等)、内存管理等功能,同时保持非常小的资源占用(包括RAM和ROM)。
FreeRTOS 的特点:
- 轻量级:FreeRTOS 的内核代码非常精简,可以在非常有限的资源(如几KB的RAM和ROM)上运行。
- 可配置:用户可以根据需要配置FreeRTOS,只包含所需的功能,从而进一步减少资源占用。
- 跨平台:FreeRTOS 支持多种微控制器和处理器架构,包括 ARM Cortex-M、PIC、AVR、ESP32 等。
- 实时性:FreeRTOS 提供了基于优先级的任务调度,确保高优先级任务能够尽快得到执行,满足实时性要求。
- 丰富的功能:除了基本的任务调度和同步机制外,FreeRTOS 还提供了队列、定时器、事件标志组等高级功能。
- 易于使用:FreeRTOS 的API设计直观,易于学习和使用,同时提供了丰富的文档和示例代码。
应用场景:
FreeRTOS 广泛应用于各种嵌入式系统中,包括但不限于工业自动化、医疗设备、消费电子、汽车电子、无人机等领域。在这些应用中,FreeRTOS 的实时性和资源效率是关键因素,使得开发者能够构建出高效、可靠的嵌入式系统。
与其他RTOS的比较:
与其他实时操作系统相比,FreeRTOS 的主要优势在于其轻量级和可配置性。然而,它也可能在功能丰富性和社区支持方面不如一些商业RTOS。因此,在选择RTOS时,需要根据具体的应用需求和资源限制进行权衡。
总之,FreeRTOS 是一个功能强大、易于使用且资源占用极低的实时操作系统,非常适合用于资源受限的嵌入式系统开发。
FreeRTOS和STM32的区别
STM32不是裸机
FreeRTOS和STM32在嵌入式系统开发中扮演着不同的角色,它们之间存在明显的区别,主要体现在以下几个方面:
定义与性质
FreeRTOS:
- 定义:FreeRTOS是一个免费和开源的实时操作系统内核,专为嵌入式系统设计。
- 性质:FreeRTOS是一个软件层面的解决方案,提供了一套用于任务管理、调度、同步和通信等功能的API。
STM32:
- 定义:STM32是意法半导体公司推出的一款基于ARM Cortex-M内核的32位微控制器系列。
- 性质:STM32 是 一个硬件层面的产品,是一个集成了处理器核心、内存、接口和其他外设等功能的微处理器单元(MPU)。
功能与用途
- FreeRTOS:
- 功能:提供任务管理、时间管理、内存管理和通信机制等内核功能。
- 用途:在嵌入式系统中实现多任务环境,管理多个独立功能的任务,提高系统的稳定性和效率。
- STM32:
- 功能:提供高性能、低功耗的计算能力,以及丰富的外设支持(如ADC、DAC、UART、SPI、I2C等)。
- 用途:作为嵌入式系统的核心处理器,负责执行程序代码,控制外设,实现各种应用需求。
关系与配合
关系:
FreeRTOS可以运行在STM32等微控制器上,利用STM32提供的硬件资源来执行任务调度、同步和通信等功能。
配合:
在嵌入式系统开发中,STM32作为硬件平台,FreeRTOS作为软件框架,两者相互配合,共同实现系统的功能需求。
总的来说
FreeRTOS和STM32在嵌入式系统开发中各有其独特的角色和用途。FreeRTOS作为软件层面的实时操作系统内核,提供了丰富的任务管理和同步通信功能;而STM32作为硬件层面的微控制器系列,提供了高性能、低功耗的计算能力和丰富的外设支持。在实际开发中,两者相互配合,共同构建出稳定、高效的嵌入式系统。
任务调度
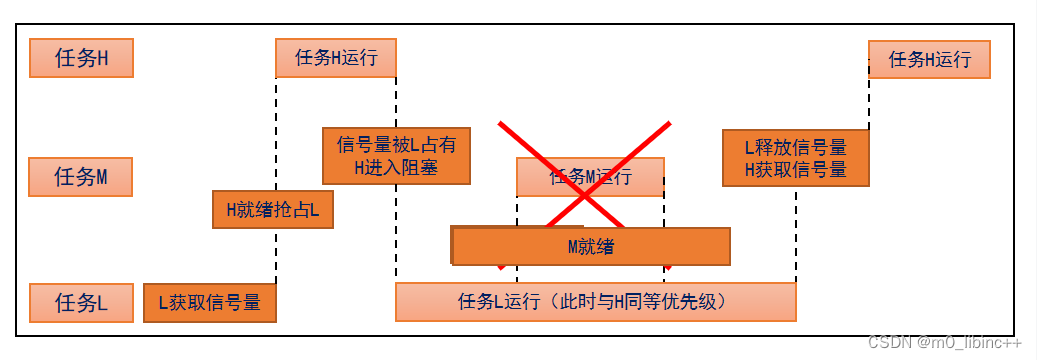
抢占式调度(Preemptive Scheduling)
定义:
抢占式调度是一种基于任务优先级的调度方式。主要是针对优先级不同的任务,每个任务都有一个优先级,优先级高的任务可以抢占优先级低的任务。
当一个高优先级任务变为就绪状态时(例如,等待的事件发生或中断服务程序更改了任务优先级),调度器会暂停当前正在执行的低优先级任务,并将CPU控制权转交给高优先级任务。
这种调度方式确保了紧急任务能够得到及时响应,提高了系统的实时性。
优点:适用于实时性要求高的系统,能够确保高优先级任务及时响应。
缺点:上下文切换的开销较大,可能会影响系统的性能。
图解

- 高优先级任务,优先执行
- 高优先级任务不停止,低优先级任务无法执行
- 被抢占的任务将会进入就绪态
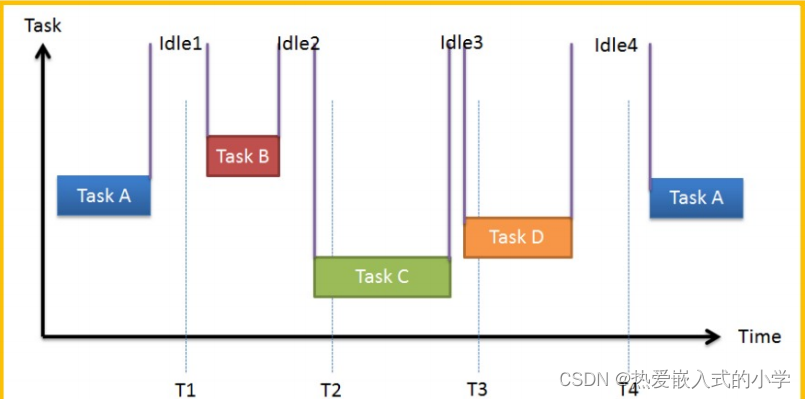
时间片调度(Time-Slicing Scheduling)
定义:
时间片调度是一种特殊的抢占式调度方式。它将CPU时间划分为固定长度的时间片,每个任务在一个时间片内运行。主要针对优先级相同的任务,当多个任务的优先级相同时, 任务调度器会在每一次系统时钟节拍到的时候切换任务。
当一个时间片结束时,无论任务是否完成,都会发生上下文切换,将CPU控制权转交给下一个任务(通常是具有相同优先级的下一个任务)。这种调度方式确保了每个任务都有机会在公平的时间段内运行,避免了某个任务长时间占用CPU。
优点:适用于多个任务优先级相近的场景,可以实现相对公平的CPU时间分配。防止了某个任务长时间占用CPU,保证了其他任务也有机会执行。
缺点:降低了系统的实时性(与抢占式调度相比)。

同等优先级任务轮流地享有相同的 CPU 时间(可设置), 叫时间片,在FreeRTOS中,一个时间片就等于SysTick 中断周期
- 同等优先级任务,轮流执行;时间片流转
- 一个时间片大小,取决为滴答定时器中断周期
- 注意没有用完的时间片不会再使用,下次任务Task3得到执行 还是按照一个时间片的时钟节拍运行
协作式调度(Cooperative Scheduling)
定义:
协作式调度依赖于任务自行释放CPU控制权。在协作式调度中,一旦一个任务开始执行,它将持续运行直到自己主动放弃CPU(如通过调用特定的函数)或进入阻塞状态(如等待事件或资源)。
当前执行任务将会一直运行,同时高优先级的任务不会抢占低优先级任务 FreeRTOS现在虽然还支持,但是官方已经表示不再更新协程式调度
任务状态
运行态(Running)
正在执行的任务,该任务就处于运行态,注意在STM32中,同一时间仅一个任务处于运行态。任务具有CPU的控制权,正在执行其任务函数中的代码。
就绪态(Ready)
如果该任务已经能够被执行,但当前还未被执行,那么该任务处于就绪态。当所有更高优先级的任务都执行完毕或CPU空闲时,就绪态的任务将被调度执行。
阻塞态(Blocked)
任务在等待某个外部事件(如信号量、消息队列、事件组、系统延时等)时,无法继续执行,此时的状态被称为阻塞态。任务因为等待某个资源或事件而无法继续执行。
当等待的事件到达或超时时间结束时,任务将自动退出阻塞态,并进入就绪态,准备再次被调度执行。
挂起态(Suspended)
类似暂停,调用函数 vTaskSuspend() 进入挂起态,需要调用解挂函数vTaskResume() 才可以进入就绪态。 任务被挂起后,不会占用CPU资源,也不会被调度器调用执行。
总的来说
- 仅就绪态可转变成运行态
- 其他状态的任务想运行,必须先转变成就绪态

FreeRTOS的四种任务状态(运行态、就绪态、阻塞态、挂起态)共同构成了任务调度和管理的基础。这些状态之间的转换遵循一定的规则和逻辑,确保了任务能够按照预定的规则进行切换和执行,从而实现了实时操作系统的高效性和可靠性。在FreeRTOS中,任务的状态管理是通过调度器来实现的,调度器会根据任务的优先级和状态来决定哪个任务应该被执行。

和正点原子一起学习FreeRTOS ,接下来一个系列跟随正点原子























![[UTCTF2020]babymips](https://i-blog.csdnimg.cn/direct/9c86c0a9697342b8bedea325f3ba70f0.png)















![[附开题]flask框架Web的疫情防控管理系统的设计与开发2k99k(源码+论文+python)](https://i-blog.csdnimg.cn/direct/49a1b1fc11c347bbaa774abe70e53319.png)

