0 前言
从大一开始就参加了这项比赛,目前已经已有两年赛龄了,写下这篇一方面是记录自己这两年来参与这项比赛的经验与经历,另一方面也能够希望这篇总结能为大家提供一定的参考价值🤔。
1 流程总览
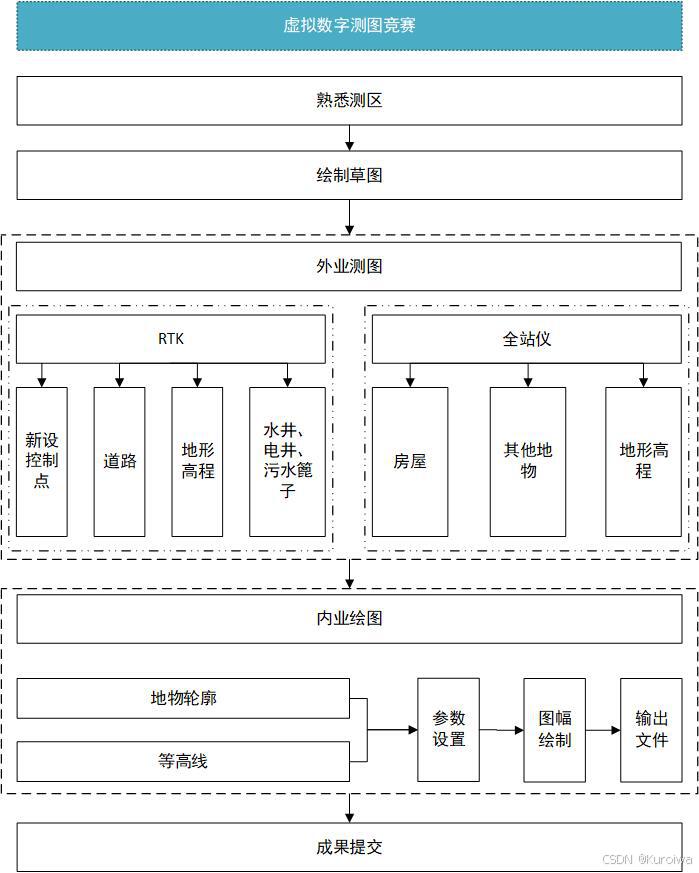
这项比赛整体流程如图一所示,主要分为外业测图与内业绘图两大部分。其中,外业测图中主要会使用到RTK与全站仪两部仪器进行测量,分别需要对地物与地形进行测量;而内业绘图则主要使用竞赛软件进行绘制,数据来源于测量所得。
2 熟悉测区
比赛进行时,通常会提前一小时发放说明文件,其中包括测区范围。可以先通过文件中的测区范围在草图上绘制大致测区轮廓,并在进入比赛场景后进一步完善地物信息。尽量精确绘制,若草图绘制不精确,容易在后续内业绘图中产生不必要的问题。
在完善地物信息时,我个人习惯用不同颜色的笔对不同地物进行区分,并标出独立地物(如污水篦子、电井、水井、艺术景观灯、路灯等)的大致位置,便于后续绘图时快速找到地物信息并进行核对。
本文将以2023年的第一次模拟赛进行示例。

3 外业测图
外业测图主要包括RTK和全站仪两部仪器,接下来我将依次介绍使用流程。
3.1 RTK
3.1.1 仪器结构
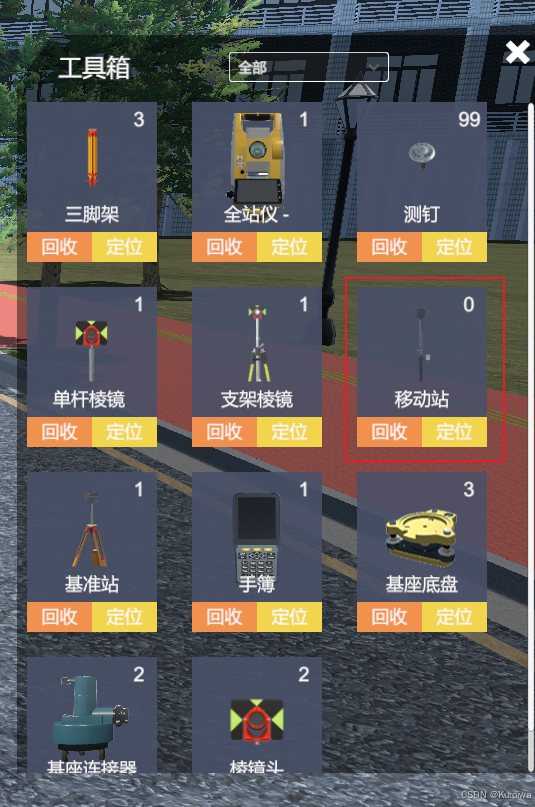
在外业测图(2024版竞赛软件)中,按Tab键打开背包,其中的移动站(红色框标注)为我们需要使用的RTK(如图3.1)。
- 将光标瞄准主机,长按开机键三秒即可开机。
- 将光标瞄准工作簿,或者按F1键(2024版竞赛软件),即可打开工作手簿。

3.1.2 内置网连接
仪器连接
打开手簿,点击【设置】→【仪器连接】,进行仪器连接。
点击【扫描】,点击搜索到的设备,最后点击【连接】即可完成仪器连接。
图解如图3.3。

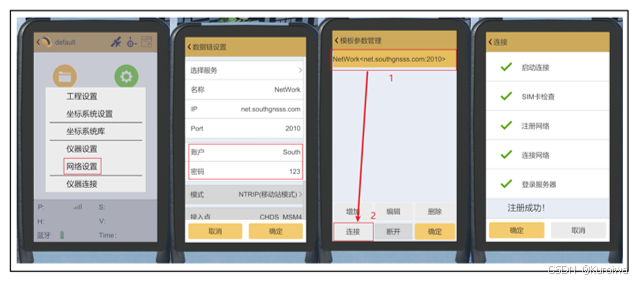
网络设置
点击【设置】→【网络设置】,即可进入网络设置界面。
在数据链设置中,输入任意密码,即可完成设置。
点击【确定】后进行模板参数管理界面,选择我们刚才设置好的参数进行连接,连接完成后点击确定即可。
图解如图3.4.
仪器设置
- 点击【设置】→【仪器设置】,即可进入仪器设置界面。
- 我们需要切换成【移动站设置】,并在数据链栏选择【接收机移动网络】,随后连接我们设置好的参数即可完成设置。
图解如图3.5。

- 当所有操作完成后,返回工作手簿的主界面,即可看到下方的固定解参数正常显示(如图3.6),接下来可以开始进行求解转换参数操作。

3.1.3 求转换参数
- 按【ESC】键打开已知点面板,将已知点导入
- 在地图中选择任意三个及以上的控制点进行测量
- 点击【输入】→【求转换参数】,进行转换参数求解
- 在该界面中,点击【添加】即可添加求参的参考坐标,这里需要注意,平面坐标(上面那个)选择已知点坐标,大地坐标(下面那个)选择刚刚测的点
- 添加完成后,依次点击【计算】→【应用】,即可完成转换参数的求解,接下来就可以进行测量操作了!
图解如图3.7所示

3.1.4 RTK测量
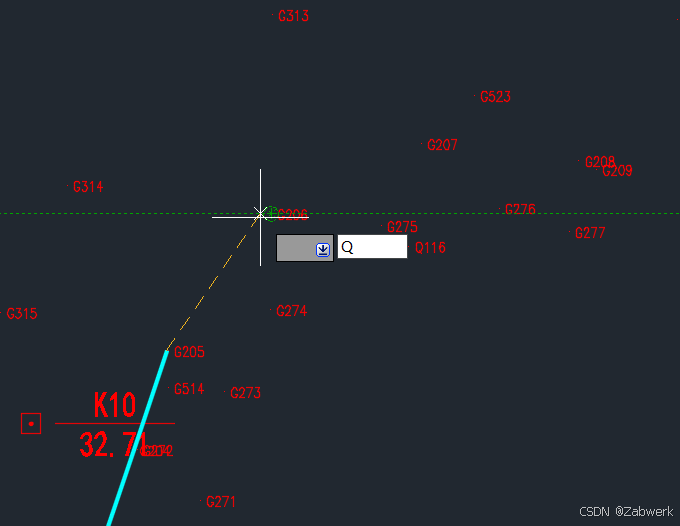
道路、人行道测量
- 顺时针或逆时针进行道路轮廓测量
- 竞赛对RTK与全站仪的测量点有较为严格的命名要求,需要注意竞赛说明文件的提示。本示例中的竞赛说明文件要求RTK的点号命名以“G+点号”的形式命名,如G1、G2……
- 在弧道处,需要测量三个点及以上。图示以三个点为主,分别为弧道断点处及弧道中心位置(如图3.8红点标注)

地物测量(竞赛版出现的主要地物)
- 花圃:围绕花圃的边界外围进行测量
- 污水篦子、污水检修井孔、电力检修井孔:测量其中心



高程测量
(该部分参考我的一位学长的PPT内容,并作出一定的修改)
- 方法一:采用"Z"形方法测量
- 方法二:沿着一定方向从山底—山顶—山底的顺序测量
- 方法三:沿着山体采用圆形测量
其中,方法二和方法三主要应用于具有山体特征的地形,起伏变化不大的地形更适用于方法一

控制点测量
控制点的测量是基于布设了测钉后进行的。
- 将RTK放置于新布设的测钉上,打开工作手簿,依次点击【测量】→【控制点测量】打开控制点测量的面板,这里需要注意,控制点的命名为“K+编号”,即K1,K2……
- 测量完成后进行保存,即可在小地图上看到控制点号发生变化



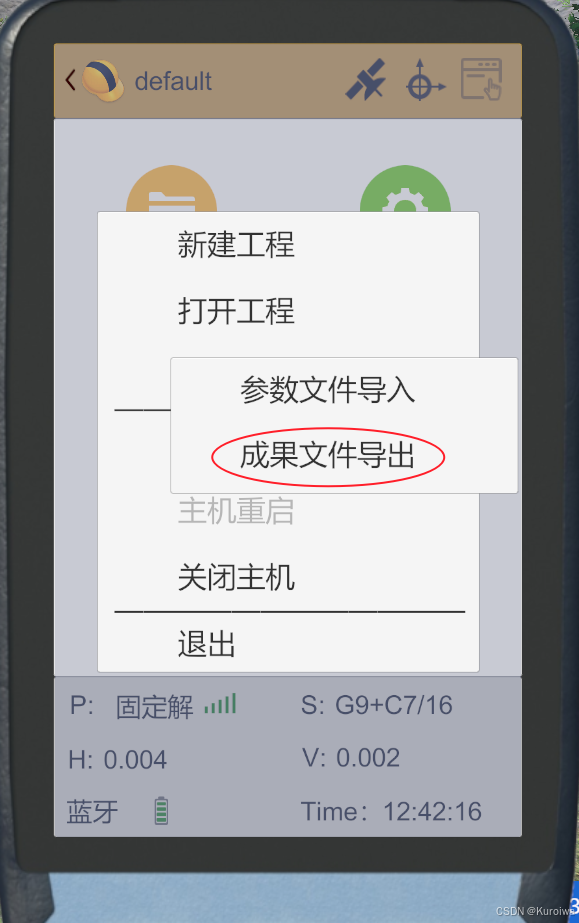
3.1.5 文件成果导出
当完成地物测量后,需要将RTK中的点进行导出,便于后续内业绘图使用
- 打开工作手簿,点击【文件】→【文件导入导出】→【成果文件导出】
- 对文件进行重命名,并保存到指定路径
即可完成RTK测量点的成果导出。
以上便是RTK测量的全部部分,接下来为全站仪的使用部分。
3.2 全站仪
3.2.1 仪器结构
在竞赛软件中,使用全站仪需要自行架设,从下到上组装依次为三脚架、基座、全站仪。

全站仪的使用在按键操作方面较为灵活,使用时需要多加练习。
3.2.2 对中整平
我们可以观察到视角右上角处的激光对点并未对中(图3.19左、中),此时需要进行对中整平的操作,避免出现测量错误。
- 将视角移至全站仪右侧,长按开关键三秒,启动全站仪。

- 依次点击全站仪操作面板【左上角的按钮】→【激光下对点】,即可在激光对点小视窗中发现红点激光
(Tips:激光指示与十字丝照明都打开会便于后续操作测量)

- 将视角移至三脚架,在基座下方有个旋钮,通过对准旋钮,并上下滑动【鼠标滚轮】使其松动,此时可以灵活移动全站仪


3.2.3 建站
- 在后视点处架设棱镜,并使其对准全站仪(按【E】)
- 将全站仪瞄准后视点处的棱镜

- 在全站仪面板中导入【RTK测量的控制点数据】
- 在全站仪面板处依次点击【建站】→【已知点建站】,将【测站】设置为【全站仪】所架设的控制点坐标,后视点设置为棱镜所架设的控制点坐标

- 设站完成后需要进行后视检查,点击【返回】→【后视检查】观察建站结果是否存在误差
3.2.4 测量
- 建站完成后,选择测点,并选用无合作模式。

- 使用粗瞄准,使得房屋点大致对准,再使用目镜以及物镜,使得目标物清晰。
- 使用水平微动和垂直微动不断调整,最终使目镜能准确瞄准地物,点击【采集】→【点测量】,注意全站仪的点名命名规则为“Q+点号”,如Q1、Q2……

3.3 外业测量顺序
这一部分并不是大家都需要跟我一样,但是有自己的一套外业测量顺序,便于在测图中避免重测、漏测的情况,以及在后续内业绘图中省去很多麻烦。
- RTK:测量控制点、导出
- RTK:测量高程点、导出
- RTK:测量道路、人行道、花圃
- RTK:测量污水篦子→污水检修井孔→电力检修井孔
- RTK:数据导出
- 全站仪:导入RTK高程点数据
- 全站仪:测量房屋(编号Q2##)
- 全站仪:测量路灯、艺术景观灯、消火栓(编号Q3##)
- 全站仪:数据导出
以上为外业测图的全部部分,接下来为内业绘图的部分
4 内业绘图
(内业绘图部分内容参考学长的PPT)4.1 软件介绍
内业绘图使用的软件是竞赛版SouthMap数字成图竞赛软件。
4.2 数据导入
在上方菜单栏中找到【数据】并点击,然后点击【读取虚拟仿真数据】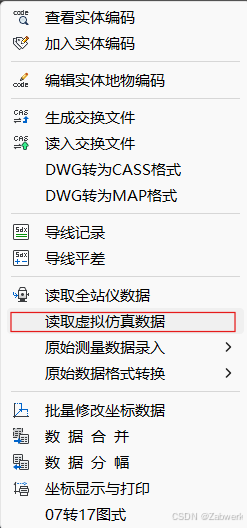
4.3 地物绘制
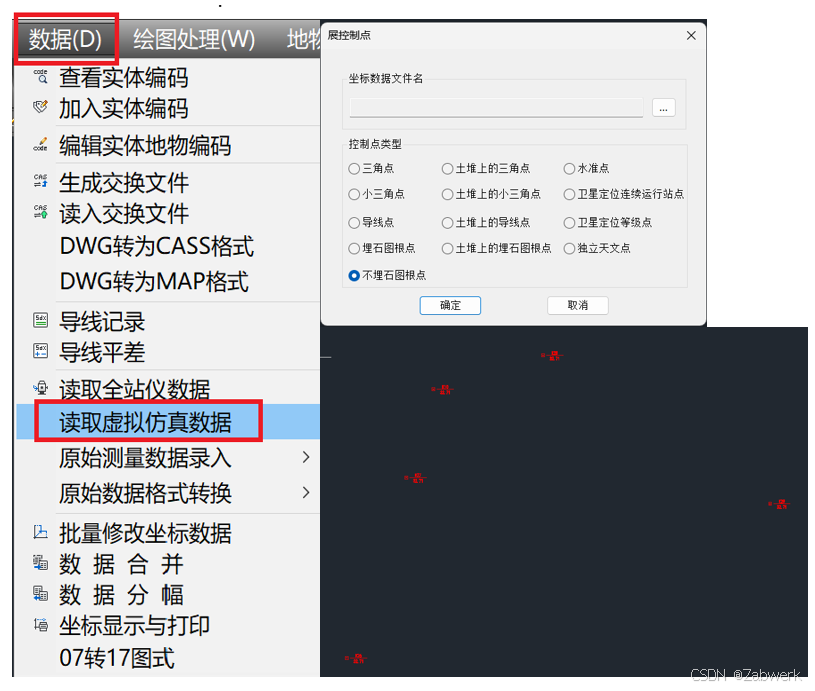
4.3.1 绘制不埋石图根点
- 在菜单栏中找到并点击“数据”,点击“读取虚拟仿真数据”
- 按下Enter选择1:500的比例尺
- 键盘输入5或者在命令栏内点击“展控制点(5)”
- 在弹出的窗口点击“不埋石图根点”,点击确定。
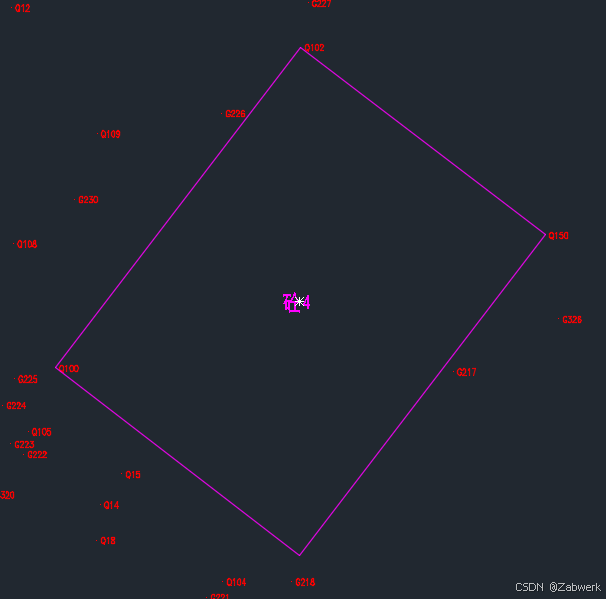
4.3.2 绘制房屋
展野外测点点号(2),在右侧栏目中找到多点砼房屋属性线进行绘制。在碰到直角边时,可以采用“隔一点J”的方法进行绘制;
在即将完成房屋绘制时,输入C完成闭合,按照命令输入房屋的层数,此时,房屋上会显示房屋属性砼和层数,如果不输入C进行闭合,则无法输入房屋的层数。
如果闭合时发现中间间隔了一个点,可以输入G完成隔一点闭合,同样能够实现闭合操作。
4.3.3 绘制街道主干道、人行道、内部道路、地类界
- 展野外测点点号,导入相应的点数据。在右侧栏目中找到街道主干道的属性线进行绘制街道主干道,找到人行道的属性线绘制人行道,找到内部道路绘制内部道路,找到地类界绘制地类界。
- 将十字丝对准要绘制的点,调节鼠标滚轮可以实现放大或缩小。在道路转弯处,可以按照下方命令输入Q,绘制弧线;在一条较长的弧形道路中,可以在绘制完成后右键点击“曲线拟合”,此时分段直线会变成一条曲线。
- 若整条道路已经画完才发现道路闭合,或道路因地类不同需要绘制地类界进行区分等情况,可采取以下措施:找到并点击菜单栏中的“编辑”,点击“断开”“选物体,定2点”。如图4.6情况为需要中断道路部分区域重新绘制地类界。
注意
- 不同材质之间用地类界相隔,材质相同,但种类不同的则不用地类界相隔(例砖与砖之间就不用地类界相隔)
- 道路不可封闭
- 有些部分道路和房屋相接可不测,直接在画图的时候,用垂直(需要打开对象捕捉功能中的垂足)
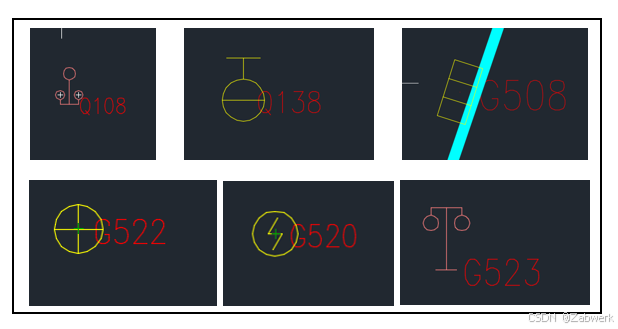
4.3.4 独立地物绘制
- 直接找到相应地物表示的图标加以绘制即可
4.3.5 绘制等高线
建立三角网
在菜单栏中找到并点击【等高线】,点击【建立三角网】,在弹出的窗口中选择“【由图面高程点生成】,点击确定,按提示在命令栏内输入2(直接选取高程点或控制点),选择对象时,将全图囊括在内,选择完毕后按下【Enter键】。
绘制等高线
在菜单栏中找到并点击“等高线”,点击“绘制等高线”,在弹出的窗口点击确定,等高线即绘制完成,绘制完成后,找到并点击“删三角网”。
过滤高程点
如果发现等高线周围的高程点过于密集,影响美观,可以在命令栏内输入“GCDGUOLV”(高程点过滤),按下回车键,根据需要修改高程距离,完成后点击确定。这里以过滤间距设置为8.00米。
等高线注记
用“PL”命令画一条直线,沿着由低到高的方向画,再在菜单栏中找到并点击“等高线”,点击“等高线注记”,选择“沿直线高程注记”,只需处理计曲线,保留小数,然后点击这条白线,完成注记。
等高线修剪
点击“等高线修剪”“批量修剪等高线”,可以发现注记和等高线断开,更加清晰美观。
高程点避让
如果高程点与部分地物发生重合,此时需要进行高程点避让操作。点击【工具箱】→【高程点工具】→【高程点注记避让】,对全图进行处理。如图,高程点与天然草地中地物符号发生重合,可以通过此操作避免重合。
5 结语
本文的内容主要是基于平时练习以及多次模拟赛中的经验积累而写下的内容,也很感谢之前拿过国特的学长亲自指导。希望本文能够为备赛以及平时有测绘需求的同学们提供一定的参考,如有问题欢迎大家随时与我联系。后续我也会对本文进行进一步的补充,敬请批评指正!
我的个人主页→Zabwerk的元空间
(如需转载请标注出处)