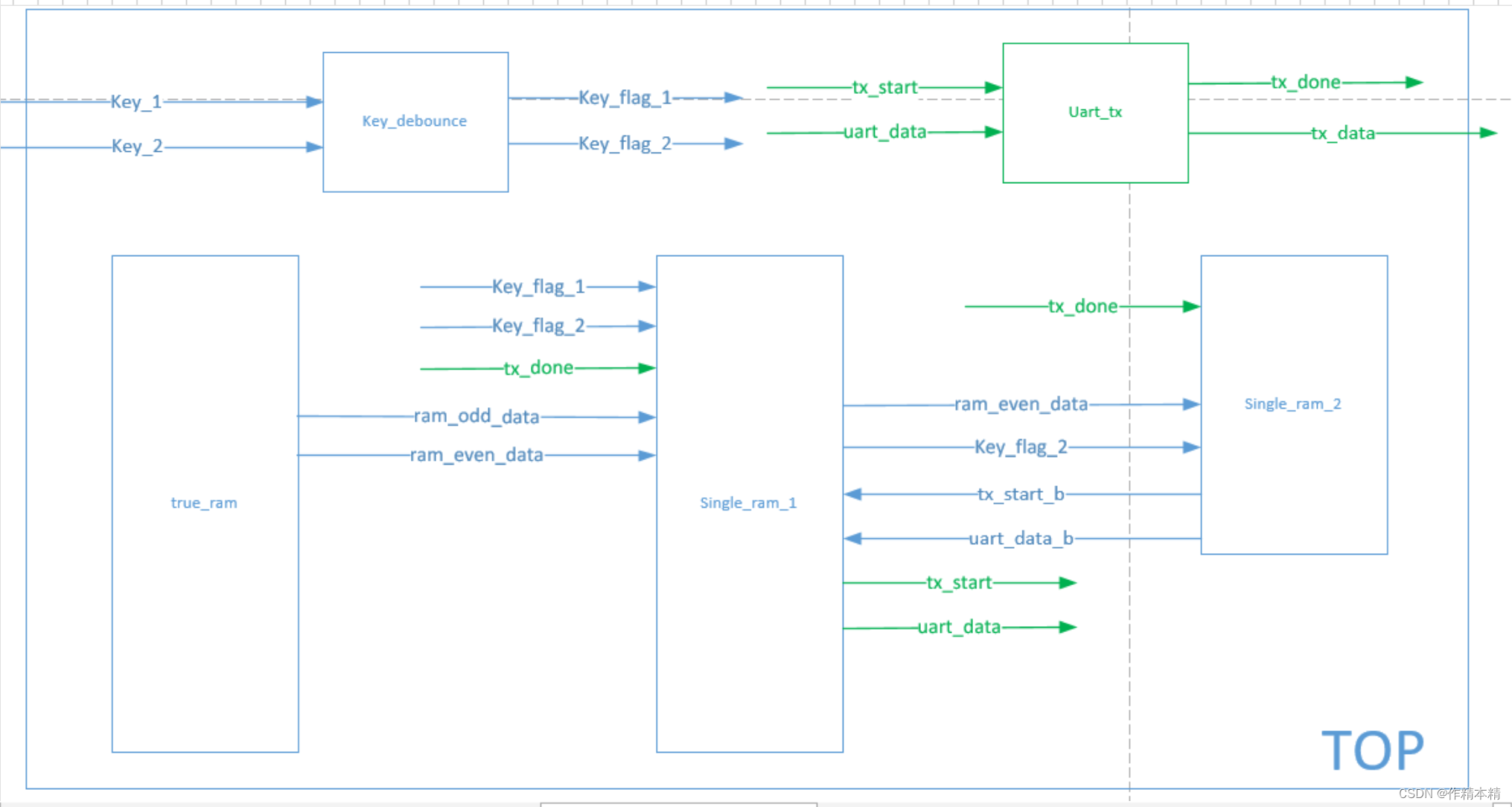
在设计FPGA时,多运用模块化的思想取设计模块,将某一功能设计成module。
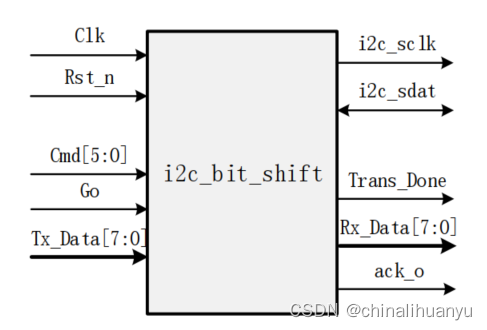
设计之前要先画一下模块设计图,列出输入输出接口,再进一步设计内部功能。
状态机要画图,确定每个状态和状态之间怎么切换。状态用localparam定义。
顶层向下传递的要定义为wire,底层向上传递的要定义为reg。
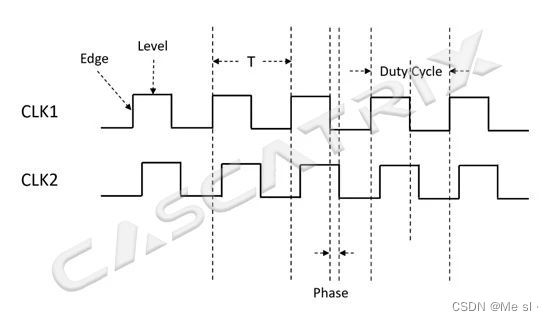
根据时序将每一个时钟周期进行按步分解。对于通讯协议要对每条线仔细分析。
每个模块要用一个tb测试
testbench例子
always #10 Clk = ~Clk;
initial begin
Clk = 1;
Rst_n = 0;
Cmd = 6'b000000;
Go = 0;
Tx_DATA = 8'd0;
#2001;
Rst_n = 1;
#2000;
//写数据操作,往EEPROM器件的B1地址写数据DA
//第一次:起始位+EEPROM器件地址(7位)+写方向(1位)
Cmd = STA | WR;
Go = 1;
Tx_DATA = 8'hA0 | 8'd0;//写方向
@ (posedge Clk);
#1;
Go = 0;
@ (posedge Trans_Done);
#200;
//第二次:写8位EEPROM的寄存器地址
Cmd = WR;
Go = 1;
Tx_DATA = 8'hB1;//写地址B1
@ (posedge Clk);
#1;
Go = 0;
@ (posedge Trans_Done);
#200;
//第三次:写8位数据 + 停止位
Cmd = WR | STO;
Go = 1;
Tx_DATA = 8'hda;//写数据DA
@ (posedge Clk);
#1;
Go = 0;
@ (posedge Trans_Done);
#200;
#5000000; //仿真模型的两次操作时间间隔
//读数据操作,从EEPROM器件的B1地址读数据
//第一次:起始位+EEPROM器件地址(7位)+写方向(1位)
Cmd = STA | WR;
Go = 1;
Tx_DATA = 8'hA0 | 8'd0;//写方向
@ (posedge Clk);
#1;
Go = 0;
@ (posedge Trans_Done);
#200;
//第二次:写8位EEPROM的寄存器地址
Cmd = WR;
Go = 1;
Tx_DATA = 8'hB1;//写地址B1
@ (posedge Clk);
#1;
Go = 0;
@ (posedge Trans_Done);
#200;
//第三次:起始位+EEPROM器件地址(7位)+读方向(1位)
Cmd = STA | WR;
Go = 1;
Tx_DATA = 8'hA0 | 8'd1;//读方向
@ (posedge Clk);
#1;
Go = 0;
@ (posedge Trans_Done);
#200;
//第四次:读8位数据 + 停止位
Cmd = RD | STO;
Go = 1;
@ (posedge Clk);
#1;
Go = 0;
@ (posedge Trans_Done);
#200;
#2000;
$stop;
end每个模块要建立一个testbench
时钟分频
//系统时钟采用50MHz
parameter SYS_CLOCK = 50_000_000;
//SCL总线时钟采用400kHz
parameter SCL_CLOCK = 400_000;
//产生时钟SCL计数器最大值
localparam SCL_CNT_M = SYS_CLOCK/SCL_CLOCK/4 - 1;
reg [19:0]div_cnt;
reg en_div_cnt;
always@(posedge Clk or negedge Rst_n)
if(!Rst_n)
div_cnt <= 20'd0;
else if(en_div_cnt)begin
if(div_cnt < SCL_CNT_M)
div_cnt <= div_cnt + 1'b1;
else
div_cnt <= 0;
end
else
div_cnt <= 0;
wire sclk_plus = div_cnt == SCL_CNT_M;串转并
reg[7:0]Rx_DATA;
Rx_DATA <= {Rx_DATA[6:0],i2c_sdat};命令可以选择使用独热码编码
localparam
IDLE = 7'b0000001, //空闲状态
GEN_STA = 7'b0000010, //产生起始信号
WR_DATA = 7'b0000100, //写数据状态
RD_DATA = 7'b0001000, //读数据状态
CHECK_ACK = 7'b0010000, //检测应答状态
GEN_ACK = 7'b0100000, //产生应答状态
GEN_STO = 7'b1000000; //产生停止信号亚稳态
跨时钟域信号传输;异步信号采集;复位电路。
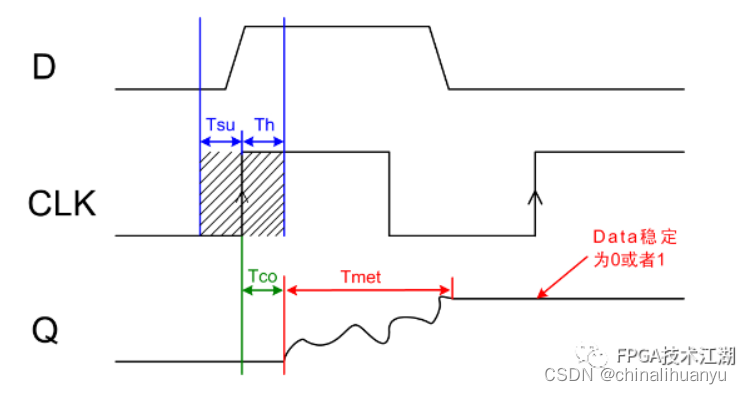
在FPGA系统中,如果数据传输中不满足触发器的Tsu和Th不满足,或者复位过程中复位信号的释放相对于有效时钟沿的恢复时间(recovery time)不满足,就可能产生亚稳态,此时触发器输出端Q在有效时钟沿之后比较长的一段时间处于不确定的状态,在这段时间里Q端在0和1之间处于振荡状态,而不是等于数据输入端D的值。这段时间称为决断时间(resolution time)。经过resolution time之后Q端将稳定到0或1上,但是稳定到0或者1,是随机的,与输入没有必然的关系。
异步信号采集
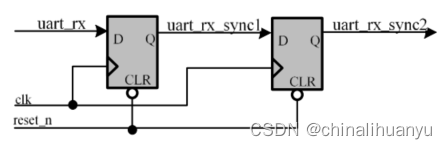
always@(posedge clk or posedge reset)
if(reset)begin
uart_rx_sync1 <= 1'b0;
uart_rx_sync2 <= 1'b0;
end
else begin
uart_rx_sync1 <= uart_rx;
uart_rx_sync2 <= uart_rx_sync1;
end边沿检测
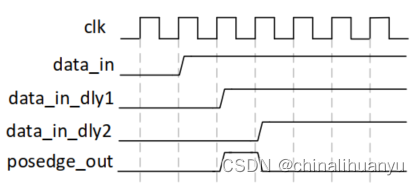
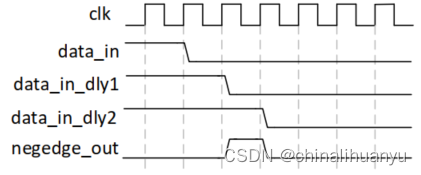
//下降沿检测
always@(posedge clk or posedge reset)
if(reset)begin
uart_rx_reg1 <= 1'b0;
uart_rx_reg2 <= 1'b0;
end
else begin
uart_rx_reg1 <= uart_rx_sync2;
uart_rx_reg2 <= uart_rx_reg1;
end
assign uart_rx_nedge = !uart_rx_reg1 & uart_rx_reg2;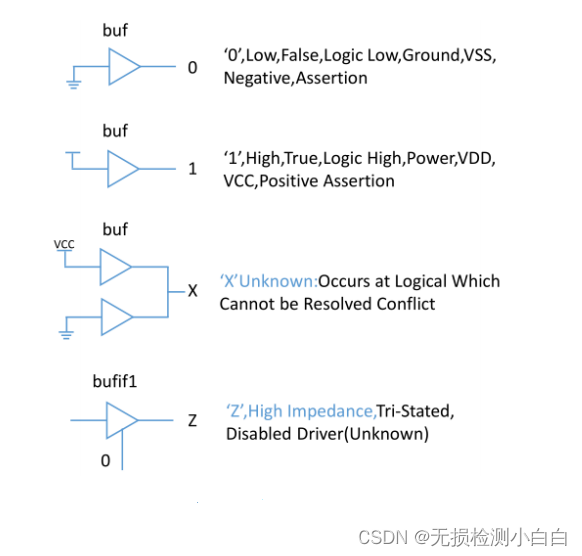


![[米联客-安路飞龙DR1-FPSOC] <span style='color:red;'>FPGA</span>基础篇连载-15 SPI接收<span style='color:red;'>程序</span><span style='color:red;'>设计</span>](https://i-blog.csdnimg.cn/direct/c9eb70aa78dc41869c6748120f91368d.png)