- 模型概述:
- 自行车动力学模型通常用于研究自行车在骑行过程中的行为,如稳定性、操控性和速度等。
- 模型可以基于不同的简化假设和复杂度,从简单的二维模型到复杂的三维模型,甚至包括骑行者的动态。
- 力学方程:
- 基础物理学方程F=ma(力 = 质量×加速度)被应用于自行车运动。在恒定速度下,这简化为FP=FR,其中FP是推进力,FR是所有阻力的总和。
- 阻力包括重力阻力(在斜坡上骑行时)、向前运动的空气阻力、滚动阻力、车轮轴承阻力和车轮转动的空气阻力等。
- 动力学建模方法:
- 自行车动力学模型可以使用不同的数学工具和方法来建立,如牛顿-欧拉方法、拉格朗日方程等。
- 拉格朗日方程以能量和功作为力学基本量,特别适用于受约束系统的动力学问题。对于自行车一人体系统,由于刚体数目较少,经典的拉格朗日方程是一个合适的选择。
- 空气动力学应用:
- 空气动力学在自行车设计中非常重要,特别是在降低风阻和提高稳定性方面。
- 通过优化车架结构、改变车手体位和车轮形状等措施,可以减少空气阻力的影响,提高自行车的速度和效率。
- 模型参数:
- 模型参数可以包括自行车的质量、车轮半径、转动惯量、阻力系数等。
- 骑行者的体重、身高、骑行技能等也会影响模型的结果。
- 动力学模型中,有几个重要的参数需要考虑
3. 算法流程
- 质量参数:
- 自行车和骑手的总质量(m):这个参数影响重力阻力和其他阻力的计算。例如,在重力阻力的公式 Fg = mgsin(arctan(G)) 中,m 代表了自行车和骑手的总质量。
- 阻力系数:
- 空气阻力系数(Cd):在向前运动的空气阻力 FA = 0.5 * Cd * A * ρ * vA^2 中,Cd 是阻力系数,代表了自行车和骑手形状的空气动力学特性。
- 滚动阻力系数:这通常与轮胎材料和路面条件有关,影响滚动阻力 FR 的大小。
- 几何尺寸:
- 自行车和骑手的正面面积(A):用于计算空气阻力。
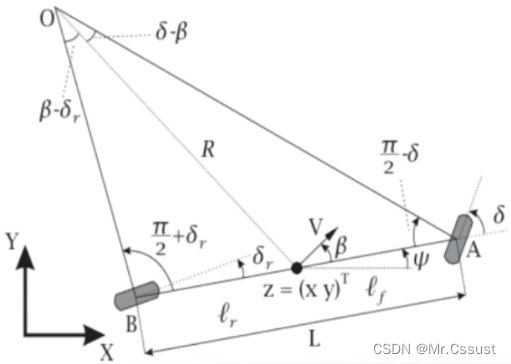
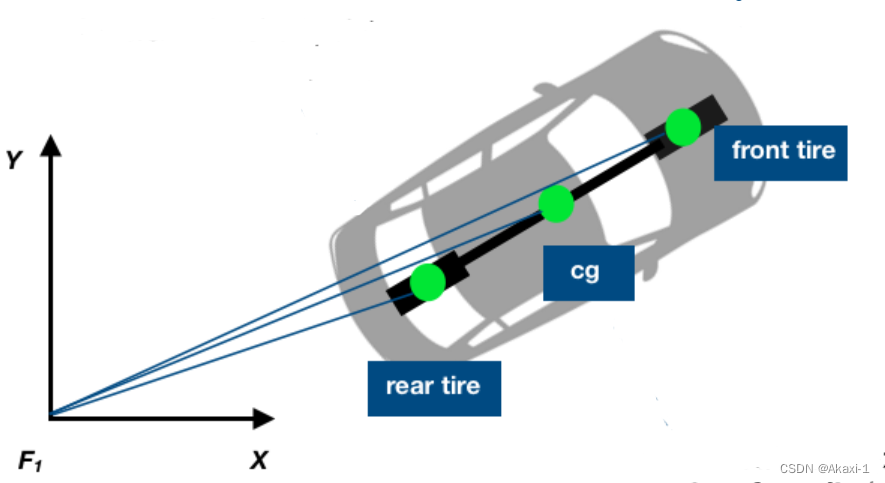
- 自行车长度(lf 和 lr):质心到前后轮中心的距离,这些参数在车辆动态方程中用于计算轮胎的侧向力。
- 物理常数:
- 重力加速度(g):通常取 9.81 m/s^2,用于计算重力阻力。
- 空气密度(ρ):影响空气阻力的计算,通常根据环境条件(如海拔、温度等)进行调整。
- 运动学参数:
- 期望速度(v_desired):个体自由行驶时的速度,这反映了骑行者的意图和期望。
- 反应系数:包括横向和纵向两类,描述了个体对于横向和纵向个人空间的需求程度。
- 动作持续时间和避让力强度:这些参数描述了骑行者在面对障碍物或需要改变行驶方向时的反应。
- 环境参数:
- 坡度(G):影响重力阻力的计算,陡峭的坡度会对骑行者的努力产生更大的需求。
- 路面条件:这会影响滚动阻力和轮胎的侧向力。
- 传输系统效率(η):
- 在将骑手的输入功率(P_in)转换为推进功率时,需要考虑传输系统的效率。这反映了自行车机械部件(如链条、齿轮等)的摩擦损失。
- 车辆动态参数:
- 车辆的动态方程可能会包含其他参数,如车辆的转动惯量、车轮的半径和宽度等,这些参数在更复杂的模型中可能会考虑。
- 自行车尺寸参数:
- 轴距(Wheelbase):前后轮轴之间的距离,影响车辆的稳定性和操控性。
- 车轮半径(Wheel radius):用于计算车辆的滚动速度和角速度。
- 自行车高度(Bicycle height):从地面到自行车顶部的距离,可能影响空气动力学特性。
- 自行车惯性参数:
- 自行车质量分布(Mass distribution):质心位置,影响车辆的操控稳定性和侧翻阈值。
- 转动惯量(Moments of inertia):车辆绕不同轴的转动惯量,影响车辆的旋转动态。
- 轮胎参数:
- 轮胎侧偏刚度(Cornering stiffness):描述轮胎在侧向力作用下的抵抗变形能力,影响车辆的操控性和稳定性。
- 轮胎滚动摩擦系数(Rolling friction coefficient):影响滚动阻力和车辆的滑行特性。
- 骑行者参数:
- 骑行者体重(Rider weight):影响车辆的总质量和重力阻力。
- 骑行者身高(Rider height):可能用于计算骑行者的舒适骑行姿势和空气动力学特性。
- 骑行者骑行技能(Riding skill):尽管这不是一个物理参数,但骑行者的技能水平会显著影响车辆的实际动态行为。
- 操控参数:
- 方向盘/手柄转角(Steering angle):用于控制车辆的转向。
- 踏板力/功率(Pedal force/power):用于控制车辆的速度和加速度。
- 外部干扰参数:
- 风速和风向(Wind speed and direction):影响车辆的空气动力学特性和稳定性。
- 路面不平度(Road roughness):影响车辆的振动和操控稳定性。
- 控制策略参数(如果模型包含控制策略):
- 控制增益(Control gains):用于调整控制器对车辆动态行为的影响程度。
- 控制延迟(Control delay):反映实际控制系统中的响应时间延迟。
- 车辆状态参数:
- 纵向速度(Longitudinal velocity):车辆前进的速度。
- 横向速度(Lateral velocity):车辆侧向移动的速度,通常较小但在曲线行驶时很重要。
- 偏航角(Yaw angle):车辆前进方向与绝对坐标系的夹角。
- 偏航率(Yaw rate):车辆偏航角的变化率,即车辆的转向速度。
1. 车辆动力学模型
车辆动力学模型是描述汽车运动规律的微分方程,它通常基于牛顿第二定律(F=ma)来推导。在这个模型中,车辆的运动受到多种力的影响,包括驱动力、制动力、阻力和转弯力等。
2. 关键参数和公式
- 质量(m):车辆的质量,影响加速度和动能的计算。
- 速度(v):车辆的速度,可以分解为纵向速度(v_x)和横向速度(v_y)。
- 加速度(a):车辆的加速度,描述了速度的变化率。
- 扭矩(T):发动机或电动机产生的扭矩,与转速(n)和马力(P)的关系为 T = P × 5252 / n。
- 马力(P):发动机或电动机的功率,与扭矩和转速的关系为 P = T × n / 5252。
- 动能(KE):KE = 0.5 × m × v^2,描述了车辆由于运动而具有的能量。
- 动量(p):p = m × v,描述了车辆的质量和速度的乘积。
- 刹车距离(d):d = (初速度 - 终速度)^2 / (2 × 刹车减速度),用于估算车辆的制动距离。
- 车辆建模:根据车辆的结构和参数,建立车辆动力学模型。
- 数据采集:通过车辆传感器和控制单元实时采集车速、油门位置、制动状态等数据。
- 目标优化:根据驾驶情况和用户需求,确定优化目标,如最小化燃油消耗、最大化加速性能或最小化排放。
- 控制策略:基于动力系统模型和优化目标,采用先进的控制策略来调整引擎功率、电机输出、换挡时机等。
- 实时优化:在车辆运行过程中,根据实时采集的数据和控制策略,不断优化车辆的动力性能。
RK4(Runge-Kutta 4阶方法)是一种用于解决常微分方程的数值方法,以下是对其的详细解释:
- 定义与原理:
- RK4是一种高精度的算法,用于求解微分方程的数值解。
- 它是一种迭代方法,通过逐步逼近精确解来得到数值解。
- RK4方法基于泰勒级数展开的思想,通过在差商区间内取多点斜率加权平均代替导数方法来提高精度。
- 算法步骤:
- 假设要求解初值问题:(y' = f(t, y), y(t_0) = y_0)。
- RK4的迭代公式为:
(y_{n+1} = y_n + \frac{h}{6}(k_1 + 2k_2 + 2k_3 + k_4))
其中,(h) 是仿真步长,满足 (h < \text{某个给定值}),而 (k_1, k_2, k_3, k_4) 是基于当前函数值和导数值的加权斜率。 - (k_1, k_2, k_3, k_4) 的计算方式如下:
- (k_1 = f(t_n, y_n))
- (k_2 = f(t_n + \frac{h}{2}, y_n + \frac{h}{2}k_1))
- (k_3 = f(t_n + \frac{h}{2}, y_n + \frac{h}{2}k_2))
- (k_4 = f(t_n + h, y_n + hk_3))
def rk4(func: Callable, state: np.ndarray, dt: float = 0.01, t: float = 0, **kwargs): """ single-step fourth-order numerical integration (RK4) method func: system of first order ODEs state: current state vector [y1, y2, y3, ...] dt: discrete time step size t: current time **kwargs: additional parameters for ODE system returns: y evaluated at time k+1 """ # evaluate derivative at several stages within time interval f1 = func(t, state, **kwargs) f2 = func(t + dt / 2, state + (f1 * (dt / 2)), **kwargs) f3 = func(t + dt / 2, state + (f2 * (dt / 2)), **kwargs) f4 = func(t + dt, state + (f3 * dt), **kwargs) return state + (dt / 6) * (f1 + (2 * f2) + (2 * f3) + f4) class BicycleVehicle(Vehicle): """ A dynamical bicycle model, with tire friction and slipping. See Chapter 2 of Lateral Vehicle Dynamics. Vehicle Dynamics and Control. Rajamani, R. (2011) """ MASS: float = 1 # [kg] LENGTH_A: float = Vehicle.LENGTH / 2 # [m] LENGTH_B: float = Vehicle.LENGTH / 2 # [m] INERTIA_Z: float = ( 1 / 12 * MASS * (Vehicle.LENGTH**2 + Vehicle.WIDTH**2) ) # [kg.m2] FRICTION_FRONT: float = 15.0 * MASS # [N] FRICTION_REAR: float = 15.0 * MASS # [N] MAX_ANGULAR_SPEED: float = 2 * np.pi # [rad/s] MAX_SPEED: float = 15 # [m/s] def __init__( self, road: Road, position: Vector, heading: float = 0, speed: float = 0 ) -> None: super().__init__(road, position, heading, speed) self.lateral_speed = 0 self.yaw_rate = 0 self.theta = None self.A_lat, self.B_lat = self.lateral_lpv_dynamics()























![[羊城杯 2020]easyser](https://img-blog.csdnimg.cn/direct/3611bb6f8abe4ede95db9f7debf812e3.png)