1. 边缘检测 (Edge Detection)
1.1 Sobel 算子
Sobel 算子是一种边缘检测算子,通过计算图像梯度来检测边缘。
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg', 0)
# 应用 Sobel 算子
sobel_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5)
sobel_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=5)
sobel = cv2.magnitude(sobel_x, sobel_y)
# 显示结果
cv2.imshow('Sobel Edge Detection', sobel)
cv2.waitKey(0)
cv2.destroyAllWindows()
1.2 Canny 边缘检测
Canny 边缘检测是一种多级边缘检测算法,效果更好。
# 应用 Canny 边缘检测
canny_edges = cv2.Canny(image, 100, 200)
# 显示结果
cv2.imshow('Canny Edge Detection', canny_edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
2. 角点检测 (Corner Detection)
2.1 Harris 角点检测
Harris 角点检测是一种经典的角点检测方法。
# 读取图像
image = cv2.imread('image.jpg')
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# Harris 角点检测
gray_image = np.float32(gray_image)
dst = cv2.cornerHarris(gray_image, 2, 3, 0.04)
image[dst > 0.01 * dst.max()] = [0, 0, 255]
# 显示结果
cv2.imshow('Harris Corners', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
2.2 Shi-Tomasi 角点检测
Shi-Tomasi 角点检测是对 Harris 算法的改进。
# Shi-Tomasi 角点检测
corners = cv2.goodFeaturesToTrack(gray_image, 100, 0.01, 10)
corners = np.int0(corners)
for corner in corners:
x, y = corner.ravel()
cv2.circle(image, (x, y), 3, 255, -1)
# 显示结果
cv2.imshow('Shi-Tomasi Corners', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
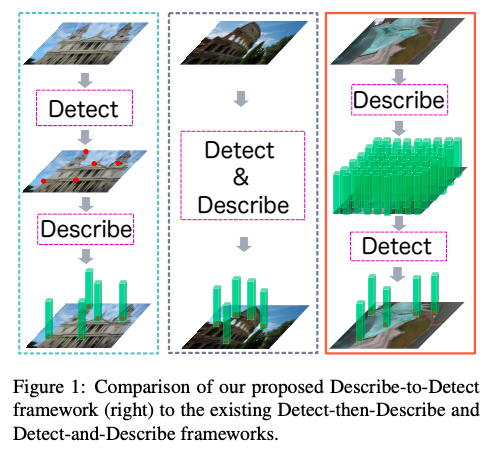
3. 尺度不变特征变换 (SIFT)
SIFT 是一种用于检测和描述局部特征的算法。
# 初始化 SIFT
sift = cv2.SIFT_create()
# 检测关键点并计算描述子
keypoints, descriptors = sift.detectAndCompute(image, None)
# 在图像中绘制关键点
sift_image = cv2.drawKeypoints(image, keypoints, None)
# 显示结果
cv2.imshow('SIFT Keypoints', sift_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
4. 加速稳健特征 (SURF)
SURF 是 SIFT 的加速版本,速度更快。
# 初始化 SURF
surf = cv2.xfeatures2d.SURF_create()
# 检测关键点并计算描述子
keypoints, descriptors = surf.detectAndCompute(image, None)
# 在图像中绘制关键点
surf_image = cv2.drawKeypoints(image, keypoints, None)
# 显示结果
cv2.imshow('SURF Keypoints', surf_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
5. ORB (Oriented FAST and Rotated BRIEF)
ORB 是一种快速且高效的特征检测和描述算法。
# 初始化 ORB
orb = cv2.ORB_create()
# 检测关键点并计算描述子
keypoints, descriptors = orb.detectAndCompute(image, None)
# 在图像中绘制关键点
orb_image = cv2.drawKeypoints(image, keypoints, None)
# 显示结果
cv2.imshow('ORB Keypoints', orb_image)
cv2.waitKey(0)
cv2.destroyAllWindows()





















![[经验] 涠洲岛在广西吗 #职场发展#知识分享#媒体](https://img-home.csdnimg.cn/images/20230724024159.png?origin_url=https%3A%2F%2Fwww.hao123rr.com%2Fzb_users%2Fcache%2Fly_autoimg%2Fn%2FNzYxMzE.jpg&pos_id=3KSdeIJN)