树莓派小车可以作为 STEM(科学、技术、工程、数学)教育的工具,在实际操作中帮助学生理解和学习电子技术、编程和机器人原理。可以培养学生的动手能力、解决问题的能力和创新思维。
随着近年 AI 技术的高速发展,SLAM、VSLAM 甚至带 AI 功能的智能小车也成了学生们热衷的 “玩具”,价格不菲的成品智能小车,却也阻挡了不少学生的求知热情和脚步。
DIY 一个自己的丐版小车底盘,一来可以省米,二来也可以享受一下 DIY 的乐趣。
一、成品展示:
现在树莓派、香橙派、香蕉派、旭日 X3 派、爱芯派、K230 等各种单板平台越来越多,性能也都十分强悍,除了可以实现图像、视频甚至复杂的 AI 算法,当然也可以直接拿来做小车的主控。
DIY 一个自己的丐版小车底盘,所需的硬件资源,除了这些单板平台(需要占用 4 个 IO 口),再加上一块 L298N 的小板,两个或者四个直流电机,轮子,亚克力板,一个充电宝,一些螺丝、螺栓,一些杜邦线等。如果你需要做视频图像的算法,还需要摄像头。
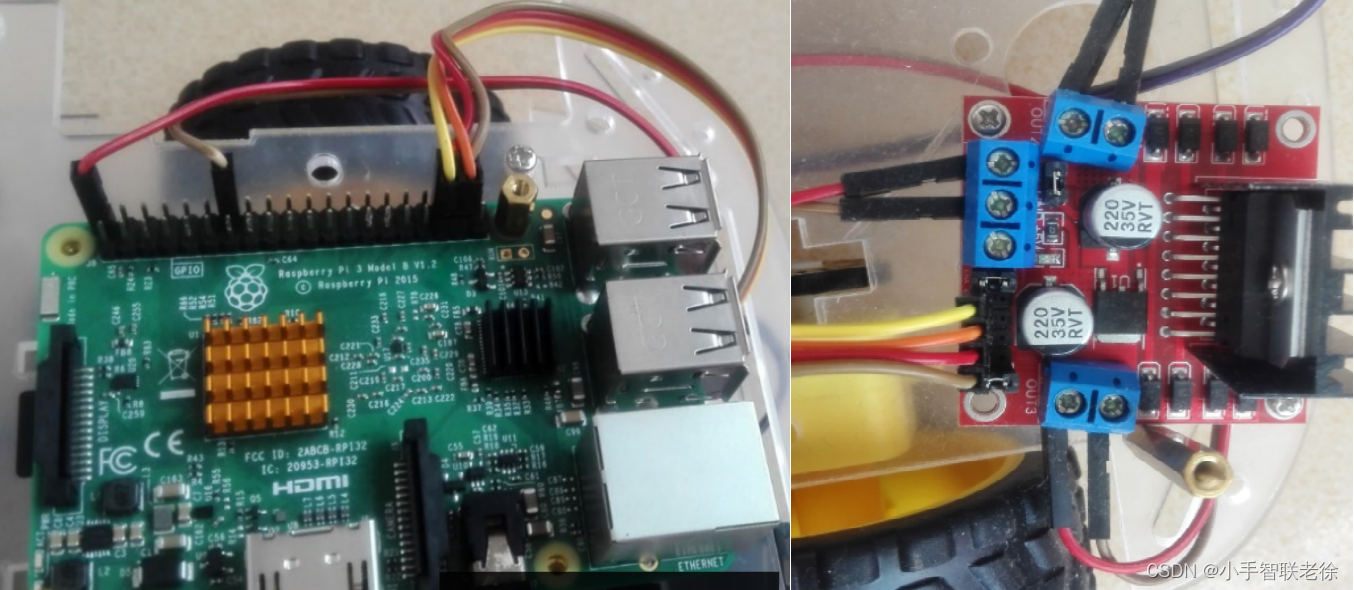
多年前 DIY 的一个四电机树莓派小车如图所示,底盘现在可以拿来换上性能强悍的香橙派。

当然也可以 DIY 一个这样两个电机的:

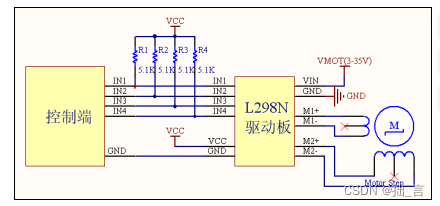
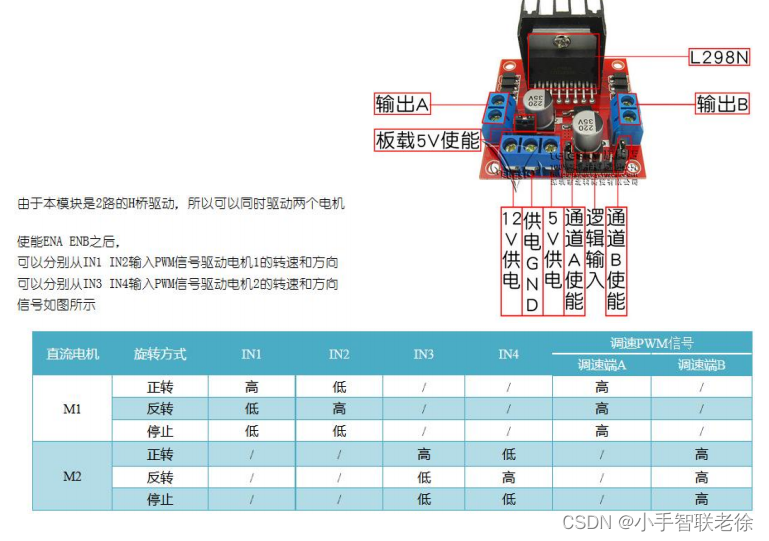
二、L298N 的使用说明:
L298N 是一款双 H 桥驱动芯片,常用于驱动直流电机和步进电机。
连接电源:将电源的正极(5V 至 12V)连接到 L298N 的12V 供电,将电源的负极连接到 GND。
连接控制信号:将控制信号接口 IN1、IN2、IN3 和 IN4 分别连接到树莓派的数字输出引脚。
连接电机:将一个电机连接到输出 A,将另一个电机连接到输出 B。
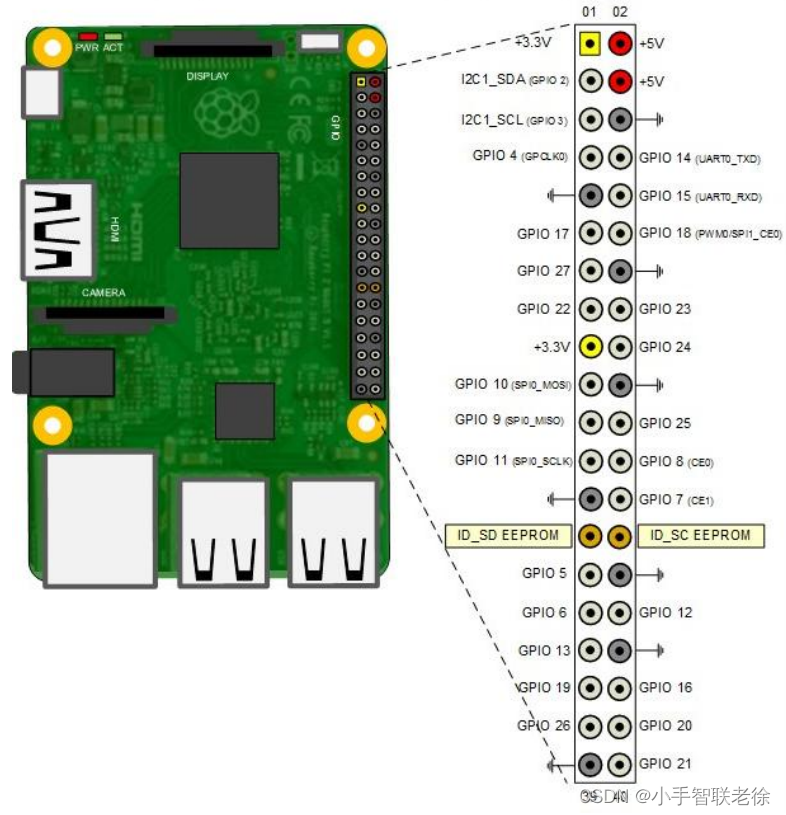
三、树莓派的 IO 脚:
以树莓派 3B 为例, 需要确认使用哪几个 IO 管脚。
四、连线:
我们从第二脚5V取电,14脚接地;给L298N供电,
用 GPIO19,26,16,20作为 L298N 的控制管脚;
物理管脚为:35,37,36,38,对应连接 L298N 的 IN1,IN2,IN3,IN4 控制管脚;
在 WiringPi 里对应的编号为:24,25,27,28,程序里使用的是这个标号。

将 L298N 的输出 A 的两根线连接一侧的直流电机两个输入,将 L298N 的输出 B 的两根线连接另一侧的直流电机两个输入。
注意:
我们将一侧两个电机并联时,由于一侧的两个电机安装方向相反,连线要交叉,这样才能保证两电机运转方向一致。
电机运转方向与期望方向不一致时,交换一下电机连线即可。

五、测试代码与编译:
编写代码 car_control.c,控制小车前进、后退、左转、右转。
#include <wiringPi.h>
#include <stdio.h>
#define IN1 24 // GPIO19 connected to L298N IN1
#define IN2 25 // GPIO26 connected to L298N IN2
#define IN3 27 // GPIO16 connected to L298N IN3
#define IN4 28 // GPIO20 connected to L298N IN4
void forward() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
printf("forward\n");
}
void backward() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
printf("backward\n");
}
void left() {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
printf("left\n");
}
void right() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
printf("right\n");
}
void stop() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
printf("stop\n");
}
int main() {
wiringPiSetup();
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
while (1) {
// Control the robot car using the following functions
forward();
delay(2000); // move forward for 2 second
stop();
delay(1000); // stop for 1 seconds
backward();
delay(2000); // move backward for 2 second
stop();
delay(1000); // stop for 1 seconds
left();
delay(1000); // turn left for 1 seconds
stop();
delay(1000); // stop for 1 seconds
right();
delay(1000); // turn right for 1 seconds
stop();
delay(3000); // stop for 3 seconds
}
return 0;
}
pi@rasppi3B:~/test $ sudo ./car_control
小结:
至此,一个丐版的小车底盘就 DIY 完成并动起来了,以此为基础,可以增加超声测距、激光雷达、摄像头等,继续学习 SLAM、VSLAM 甚至复杂的 AI 算法。
其他的香橙派、香蕉派、旭日 X3 派、爱芯派、K230 等各种派,板子上只要有 4 个可用的 IO,就可以参照树莓派完成同样的功能。
老徐,2024/6/8