目录
- 引言
- 环境准备
- 无人机控制系统基础
- 代码示例:实现无人机控制系统
- 4.1 姿态传感器数据读取
- 4.2 电机控制
- 4.3 GPS数据处理
- 4.4 用户界面与显示
- 应用场景:无人机导航与稳定控制
- 问题解决方案与优化
- 收尾与总结
1. 引言
本教程将详细介绍如何在STM32嵌入式系统中使用C语言实现无人机控制系统,包括如何通过STM32读取姿态传感器数据、控制电机、处理GPS数据以及实现用户界面与显示。本文包括环境准备、基础知识、代码示例、应用场景及问题解决方案和优化方法。
2. 环境准备
硬件准备
- 开发板:STM32F407 Discovery Kit
- 调试器:ST-LINK V2或板载调试器
- 姿态传感器:如MPU6050
- 电机控制器:如电子调速器(ESC)
- GPS模块:如Ublox NEO-6M
- 显示屏:如1602 LCD或OLED显示屏
- 遥控器和接收器:用于用户输入和控制
- 电源:LiPo电池和电源管理模块
软件准备
- 集成开发环境(IDE):STM32CubeIDE或Keil MDK
- 调试工具:STM32 ST-LINK Utility或GDB
- 库和中间件:STM32 HAL库
安装步骤
- 下载并安装 STM32CubeMX
- 下载并安装 STM32CubeIDE
- 配置STM32CubeMX项目并生成STM32CubeIDE项目
- 安装必要的库和驱动程序
3. 无人机控制系统基础
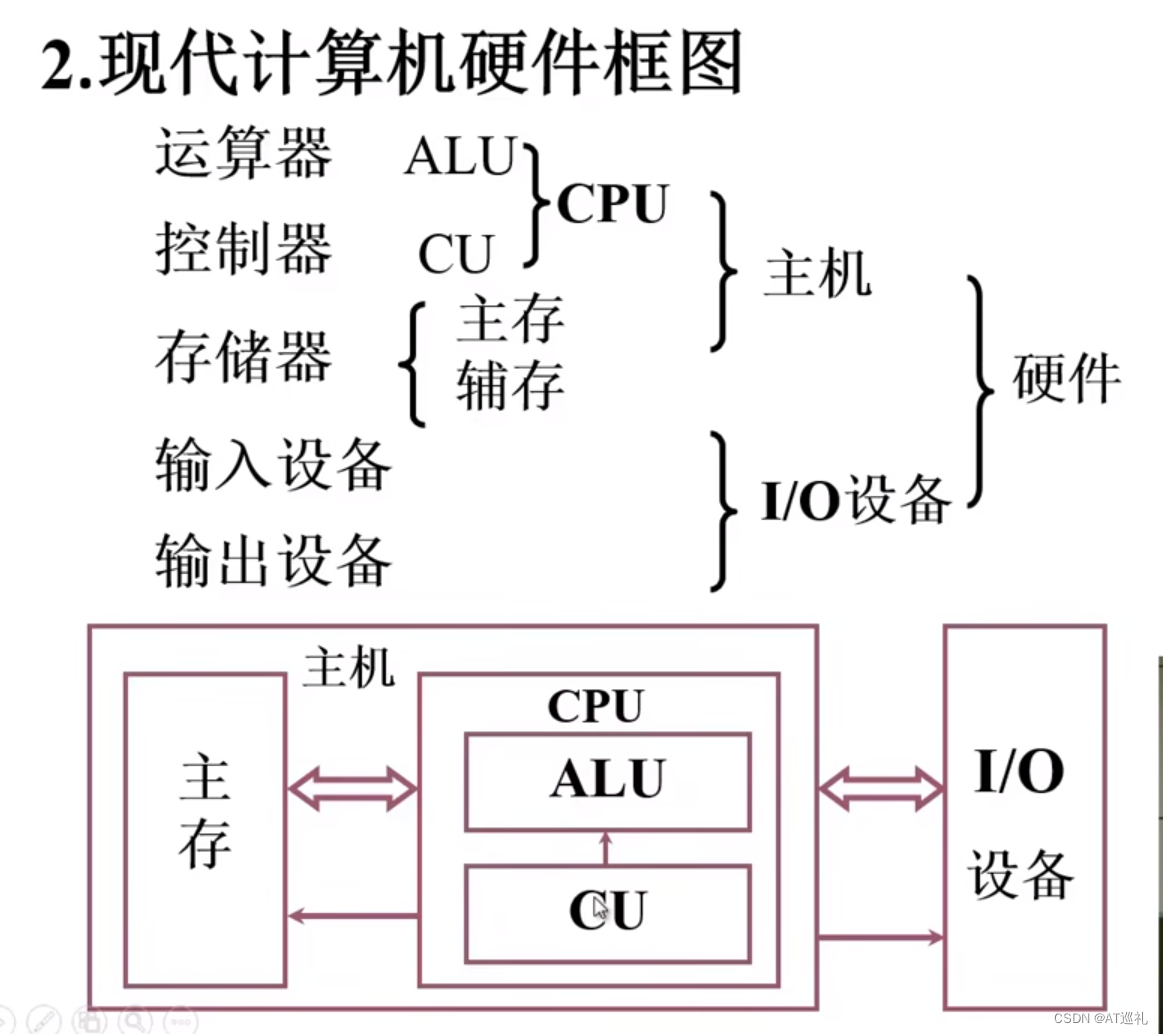
控制系统架构
无人机控制系统由以下部分组成:
- 传感器系统:用于检测无人机的姿态和位置
- 控制系统:用于控制电机,保持无人机的稳定和导航
- 通信系统:用于无人机与遥控器的通信
- 显示系统:用于显示无人机的状态
- 用户输入系统:通过遥控器进行控制和设置
功能描述
通过姿态传感器实时监测无人机的姿态,GPS模块提供位置数据,控制系统根据这些数据调节电机的转速,实现无人机的稳定飞行和导航。用户可以通过遥控器进行设置,并通过显示屏查看当前状态。
4. 代码示例:实现无人机控制系统
4.1 姿态传感器数据读取
配置MPU6050姿态传感器 使用STM32CubeMX配置I2C接口:
打开STM32CubeMX,选择您的STM32开发板型号。 在图形化界面中,找到需要配置的I2C引脚,设置为I2C模式。 生成代码并导入到STM32CubeIDE中。
实现代码
#include "stm32f4xx_hal.h"
#include "mpu6050.h"
void MPU6050_Init(void) {
// 初始化MPU6050传感器
}
void MPU6050_Read_Accel_Gyro(float* accel, float* gyro) {
// 读取MPU6050传感器的加速度和陀螺仪数据
}
int main(void) {
HAL_Init();
SystemClock_Config();
MPU6050_Init();
float accel[3], gyro[3];
while (1) {
MPU6050_Read_Accel_Gyro(accel, gyro);
HAL_Delay(100);
}
}
4.2 电机控制
配置GPIO控制电机 使用STM32CubeMX配置GPIO:
打开STM32CubeMX,选择您的STM32开发板型号。 在图形化界面中,找到需要配置的GPIO引脚,设置为输出模式。 生成代码并导入到STM32CubeIDE中。
实现代码
#include "stm32f4xx_hal.h"
#define MOTOR1_PIN GPIO_PIN_0
#define MOTOR2_PIN GPIO_PIN_1
#define GPIO_PORT GPIOA
void GPIO_Init(void) {
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = MOTOR1_PIN | MOTOR2_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIO_PORT, &GPIO_InitStruct);
}
void Control_Motor(uint8_t motor, uint8_t state) {
if (motor == 1) {
HAL_GPIO_WritePin(GPIO_PORT, MOTOR1_PIN, state);
} else if (motor == 2) {
HAL_GPIO_WritePin(GPIO_PORT, MOTOR2_PIN, state);
}
}
int main(void) {
HAL_Init();
SystemClock_Config();
GPIO_Init();
while (1) {
Control_Motor(1, GPIO_PIN_SET);
HAL_Delay(1000);
Control_Motor(1, GPIO_PIN_RESET);
HAL_Delay(1000);
}
}
4.3 GPS数据处理
配置UART接口读取GPS数据 使用STM32CubeMX配置UART接口:
打开STM32CubeMX,选择您的STM32开发板型号。 在图形化界面中,找到需要配置的UART引脚,设置为UART模式。 生成代码并导入到STM32CubeIDE中。
#include "stm32f4xx_hal.h"
#include "gps.h"
UART_HandleTypeDef huart1;
void UART_Init(void) {
__HAL_RCC_USART1_CLK_ENABLE();
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
HAL_UART_Init(&huart1);
}
void GPS_Init(void) {
// 初始化GPS模块
}
void GPS_Read_Data(char* buffer, uint16_t size) {
HAL_UART_Receive(&huart1, (uint8_t*)buffer, size, HAL_MAX_DELAY);
}
int main(void) {
HAL_Init();
SystemClock_Config();
UART_Init();
GPS_Init();
char gps_data[100];
while (1) {
GPS_Read_Data(gps_data, 100);
HAL_Delay(1000);
}
}
4.4 用户界面与显示
配置I2C显示屏 使用STM32CubeMX配置I2C:
打开STM32CubeMX,选择您的STM32开发板型号。 在图形化界面中,找到需要配置的I2C引脚,设置为I2C通信模式。 生成代码并导入到STM32CubeIDE中。
#include "stm32f4xx_hal.h"
#include "i2c.h"
#include "lcd1602_i2c.h"
void Display_Init(void) {
LCD1602_Begin(0x27, 16, 2); // 初始化LCD1602
}
void Display_Attitude(float* accel, float* gyro) {
char buffer[16];
sprintf(buffer, "Accel: %.2f", accel[0]);
LCD1602_SetCursor(0, 0);
LCD1602_Print(buffer);
sprintf(buffer, "Gyro: %.2f", gyro[0]);
LCD1602_SetCursor(1, 0);
LCD1602_Print(buffer);
}
void Display_GPS(char* gps_data) {
LCD1602_SetCursor(0, 1);
LCD1602_Print(gps_data);
}
int main(void) {
HAL_Init();
SystemClock_Config();
MPU6050_Init();
UART_Init();
Display_Init();
float accel[3], gyro[3];
char gps_data[100];
while (1) {
MPU6050_Read_Accel_Gyro(accel, gyro);
GPS_Read_Data(gps_data, 100);
Display_Attitude(accel, gyro);
Display_GPS(gps_data);
HAL_Delay(1000);
}
}
5. 应用场景:无人机导航与稳定控制
家庭娱乐和航拍
该系统可用于无人机的家庭娱乐和航拍,通过实时姿态控制和GPS导航,提高无人机的飞行稳定性和拍摄效果。
工业和农业应用
在工业和农业环境中,该系统可以用于监控和控制无人机执行特定任务,如巡检、喷洒农药等。
⬇帮大家整理了单片机的资料
包括stm32的项目合集【源码+开发文档】
点击下方蓝字即可领取,感谢支持!⬇
问题讨论,stm32的资料领取可以私信!

常见问题及解决方案
- 传感器数据不准确:确保传感器与STM32的连接稳定,校准姿态传感器和GPS模块以获取准确数据。
- 电机控制不稳定:检查GPIO配置和电气连接,确保电机控制信号的可靠性,并考虑引入PWM控制提高电机响应精度。
- GPS信号丢失:检查GPS天线的位置和信号接收情况,确保无人机飞行区域内有良好的GPS信号覆盖。
优化建议
- 引入RTOS:通过引入实时操作系统(如FreeRTOS)来管理各个任务,提高系统的实时性和响应速度。
- 增加更多传感器:添加更多类型的传感器,如气压计和磁力计,提升无人机的姿态感知精度和稳定性。
- 优化算法:根据实际需求优化飞行控制算法,如PID控制器、卡尔曼滤波器等,提高系统的智能化水平和响应速度。
7. 收尾与总结
本教程详细介绍了如何在STM32嵌入式系统中实现无人机控制系统,包括姿态传感器数据读取、电机控制、GPS数据处理和用户界面显示等内容。


























![[word] word悬挂缩进怎么设置? #经验分享#职场发展#经验分享](https://img-blog.csdnimg.cn/img_convert/17813e76510fb2e8fd3c0882fb3bba6c.gif)