1.电机模型辨识实验
1.1 实验目的
(1)掌握一阶系统阶跃响应的特点,通过实验加深对直流电解模型的理解;
(2)掌握系统建模过程中参数的整定,体会参数变化对系统的影响;
(3)熟悉Matlab软件在计算机控制方面的应用掌握建模拟合曲线的方法。
1.2 实验原理
在设计数字控制系统的控制算法的过程中,往往借助在 Matlab 等仿真软件中模拟实际系统在特定算法中的工作情况,以便设计和改进控制算法。因此,必须建立被控对象的准确的数学模型,对于参数已知的系统可以通过数学计算产生传递函数,而对于参数未知的被控对象可以通过系统辨识来确定其传递函数。目前普遍采用的系统辨识的方法主要有阶跃响应和冲激响应等。
利用阶跃响应辨识系统,就是在 t 时刻向系统输入阶跃信号,通过测量系统的响应曲线,反推出系统的传递函数参数。例如系统的传递函数未知为 W(s),在 t 时刻以前输入值为 0,在 t 时刻时输入值变为 1,则系统的输出与时间的关系为 y(t),上述关系表示为图2.1。
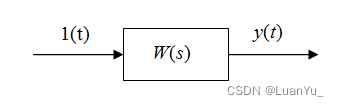
图 2.1 阶跃响应示意图
由于输入为 1(t)已知,输出 y(t)通过测量可得,从而可以计算出系统的传递函数 W(s)的参数。由于通过阶跃响应进行系统辨识的实验操作和运算简单,本文以此为手段辨识调速实验系统中被控对象的传递函数。
调速系统中的被控对象是一台直流伺服电机,其额定电压为 12V,额定电流为0.07A,其内部参数未知,传递函数待测。由于该直流电机较小,其内部线圈电感值等参数可忽略,转速 n 和其他参量的关系可以表示为式(2.1)。

式中 为电枢供电电压(V),
为电枢电流(A),
为电枢回路总电阻,
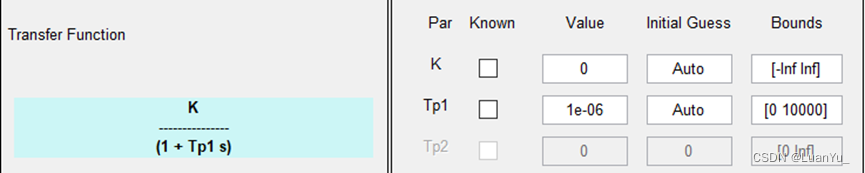
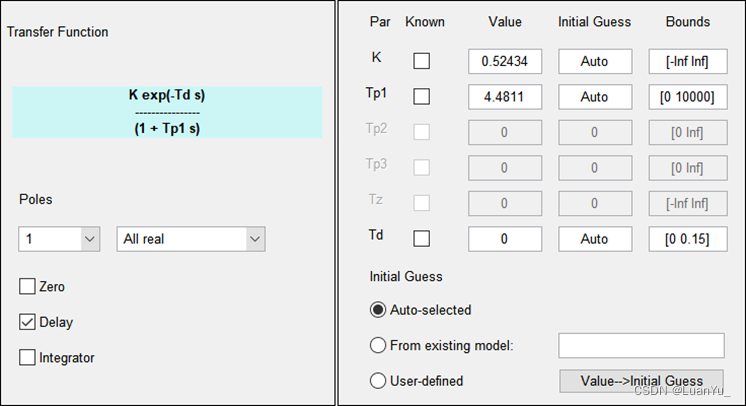
为电势系数。由于电机的电枢供电电压来自于直流调压模块,阶跃响应的输入值由上位机设定转速占空比表示,故将直流调压模块与小型直流电机共同看作无延时一阶惯性系统,其传递函数可表示为式(2.2)。

其中 K 和 T1 为系统中未知的参数值,可见只需要根据阶跃响应和输入阶跃值算出 K 和T1 的值即可得到被控对象的传递函数。
1.3 实验过程
使用KEIL C51按照操作手册中介绍的方法建立调速系统辨识实验工程,名为速度开环,其核心代码如下所示:
void Port_init()
{
P1M1=0x00; //配置P1各个端口的模式
P1M0=0x00;
}
void PWM_init(void)
{
CCON = 0X00;
CH = 0X00;
CL = CH;
CMOD = 0X02; //TIMER CLOCK RESORCE
}
void PWM0_Setting(unsigned char pwm)
{
CCAP0H = 255-pwm;
CCAP0L = CCAP0H;
CCAPM0 = 0X42; //CCAPMn寄存器的PWMn和ECOMn必须置位
CR = 1; //PWM 启动
}
void ClosePWM0()
{
CCAPM0=0;
}
将工程编译生成的speed_open.hex文件在STC ISP软件中打开,按照操作手册中介绍的方法把程序下载到单片机中,通过上位机设定转速占空比。
以上准备工作完毕之后,启动控制过程并观察速度曲线,当发现电机进入稳态时停止控制过程并保存数据,数据会保存在名data.txt文件中。
然后按照实验操作手册中关于使用Matlab工具箱进行模型辨识的具体步骤进行辨识,根据三次实验得到的K平均值和T1 平均值。在 Matlab 中进行一阶系统进行阶跃响应仿真实验,具体实验代码如下所示,判断结果是否与仿真吻合。
function [ output_args ] = Untitled2( input_args )
load 234.txt
A = textread('234.txt');
G = tf(1508.976,[0.0199 1]);
x = 0:0.005:7.81;
y = step(G,x);
plot(y,'LineWidth',2);
axis([0 240,0 3500]);
hold on
plot(A,'r')
end
1.4 实验结果及分析
1.4.1 占空比设为30
通过辨识结果可知,占空比设为30时,由于占空比过低,导致电机无法正常运行,无法辨识出正确的K值与T1 值。
1.4.2 占空比设为60
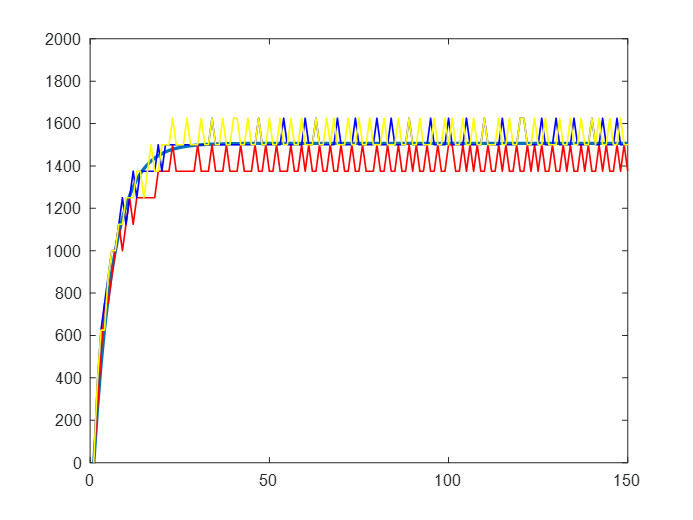
(1)辨识结果
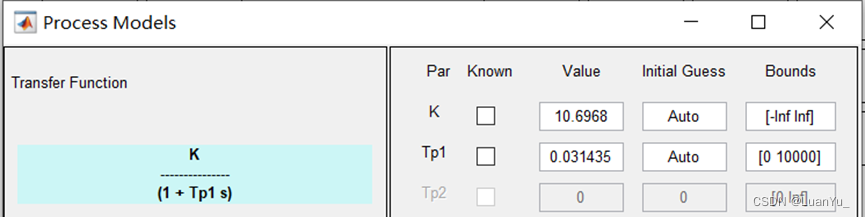


K=11.3931;T1 =0.03517;n=2212
(2)仿真结果与实物结果比较分析

通过图中可以看出,较为平滑的曲线为仿真曲线,带有锯齿的曲线为三次实物测试结果,可以看出由于系统的自身误差,导致三次测试结果有一些差异,但是实物曲线与仿真曲线基本吻合。
1.4.3 占空比设为90
(1)辨识结果


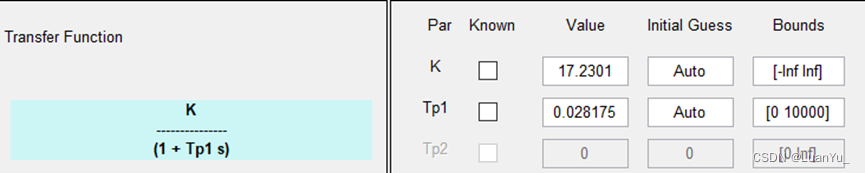
K=16.7408;T1 =0.02764;n=1704
(2)仿真结果与实物结果比较分析
通过图中可以看出,较为平滑的曲线为仿真曲线,带有锯齿的曲线为三次实物测试结果,可以看出由于系统的自身误差,导致三次测试结果有一些差异,但是实物曲线与仿真曲线基本吻合。
1.4.4 占空比设为120
(1)辨识结果



K=19.3626;T1 =0.02588;n=1599
(2)仿真结果与实物结果比较分析
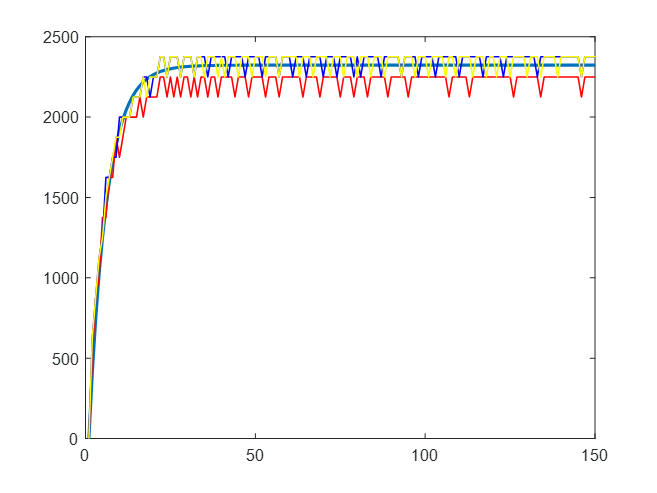
通过图中可以看出,较为平滑的曲线为仿真曲线,带有锯齿的曲线为三次实物测试结果,可以看出由于系统的自身误差,导致三次测试结果有一些差异,且由于占空比较大,实物曲线存在较多饱和部分,但是实物曲线与仿真曲线基本吻合。
1.4.5 占空比设为150
(1)辨识结果



K=20.9127;T1 =0.0255;n=1450
(2)仿真结果与实物结果比较分析
通过图中可以看出,较为平滑的曲线为仿真曲线,带有锯齿的曲线为三次实物测试结果,可以看出由于系统的自身误差,导致三次测试结果有一些差异,且相比于占空比为120的实物曲线,存在更多的饱和部分,但是实物曲线与仿真曲线基本吻合。
1.4.6 占空比设为180
- 辨识结果

(2)仿真结果与实物结果比较分析
由图象可以看出,电机曲线完全饱和,当电机占空比超过临界时,转速稳定在3500r/min,此时实物图象无法准确表现点击真实运转情况,不具有分析性。
1.5 综合分析
随着电机占空比的增加,辨识出的K值不断增加,T1 值基本不变,电机稳定转速不断增加;当电机占空比低于临界时,电机不转;当电机占空比高于临界时,电机饱和,维持在可测最大转速。
2.温度系统模型辨识实验
2.1 实验目的
(1)掌握带纯滞后的一阶惯性系统的传递函数与控制特点;
(2)掌握系统建模过程中参数的整定,体会参数变化对控制系统的影响;
(3)熟悉Matlab软件在计算机控制方面的应用;
2.2 实验原理
模型辨识的原理速度辨识实验所述一样,仅针对于温控系统的被控对象传递函数进行分析。
温控系统中的被控对象是一导热性良好的铜块,当设定一个目标温度值时,通过PWM输出调节实际温度向目标温度靠近,当温度达到目标值时,会继续上升一段时间,达到一定阈值才开始下降,因此在控制上存在一定的滞后性。由于加热片供电电压来自于直流调压模块,阶跃响应的输入值由上位机设定转速占空比表示,故将直流调压模块与加热铜块共同看作具有纯滞后的一阶惯性系统,其传递函数可表示
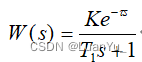
其中 K、T1、τ为系统中未知的参数值,可见只需要根据阶跃响应和输入阶跃值算出K、T1、τ的值即可得到被控对象的传递函数。
2.3 实验过程
使用KEIL C51按照操作手册中介绍的方法建立温控速系统辨识实验工程,名为温度开环,其核心代码如下所示:
void main() //主函数
{
Port_Init();
Heater_Init();
TM1638_Init();
InitPWM();
EA=1;
UART_init(19200);
ES=1;
while(Start_Flag != 1);
Start_Flag = 0;
ConfigT1M1();
ENHeater();
SetPWM1(set_value);
display(0000);
while(1)
{
if(timer1flag)
{
timer1flag=0;
PreReadTemp();
TempShow = ReadTemp();
SendData(TempShow);
display(TempShow);
}
if(Stop_Flag)
{
Stop_Flag = 0;
ClosePWM1();
Heater_Init();
}
if(Reset_Flag)
{
ISP_CONTR=0X20;
}
}
}
//驱动代码
void InitPWM(void)
{
CCON&=0X00; CH=0X00;
CL=CH;
CMOD=0X02;
}
void SetPWM1(unsigned char pwm)
{
CCAP1H = 255-pwm;
CCAP1L = CCAP1H;
CCAPM1 = 0X42;
CR = 1;
}
void ClosePWM1()
{
CCAPM1=0;
}
void Port_Init()
{
P1M1=0x00;
P1M0=0x00;
}
程序编译无误后,将wd_open.hex通过STC ISP下载工具下载到单片机中,通过上位机设定占空比。
启动控制过程并观察温度曲线,当发现温度趋于平稳时停止控制过程并保存数据,数据会保存在名为data.txt文件中。
然后按照实验操作手册中关于使用Matlab工具箱进行模型辨识的具体步骤进行辨识,根据得到的K值、值、
值。在 Matlab 中进行一阶系统进行阶跃响应仿真实验,具体实验代码如下所示,判断结果是否与仿真吻合。
load 456.txt %数据名
A = textread('456.txt');
A = A(:,1)-22.87;
num = [0,6.521];
den = [1258.566,1];
G = tf(num,den,'InputDelay',21.122);
x = 0:1:2340;
y = step(G,x);
plot(y,'LineWidth',2);
axis([0 3200,0 40]);
hold on
plot(A,'r')
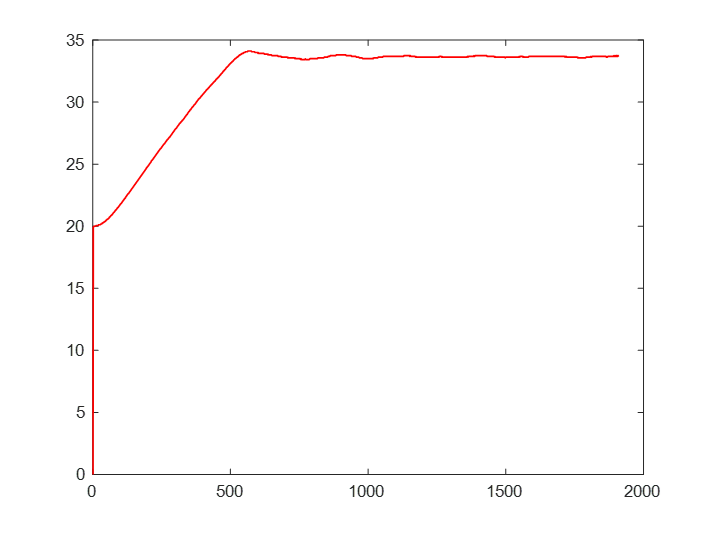
2.4 实验结果及分析
(1)辨识结果
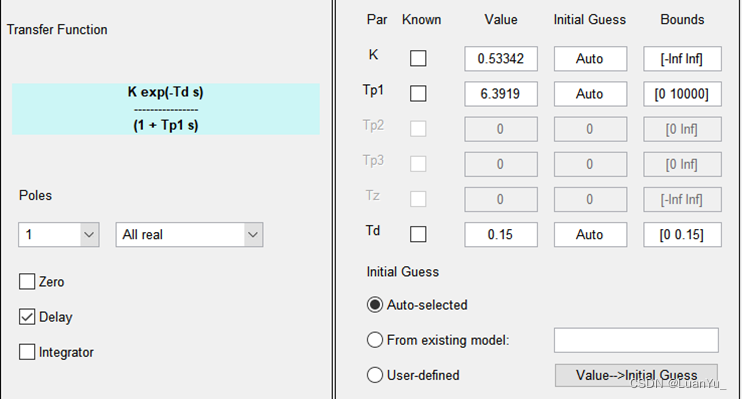
![]()
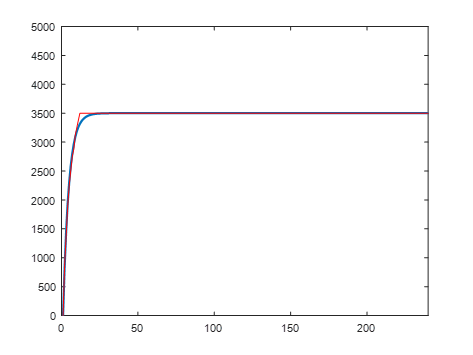
(2)仿真结果与实物结果比较分析
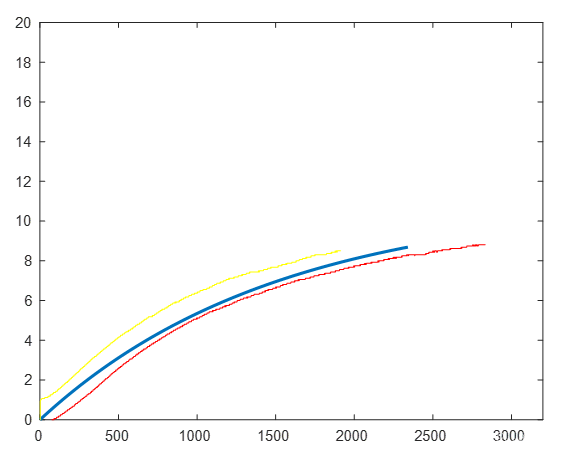
本次实验,我们几乎没有辨识出延时环节,正常由于仪器温度升到室温有一定的时间,因此对于温度辨识实验应该有10s-20s的延时环节,但由于我们在做实验时,并不是从加热开始进行测量,而是在仪器已经加热一段时间后才开始进行测量,此时仪器温度已经接近室温,在第二次实验降温时也没有降到室温以下,因此在辨识中,没有较为明显的延时环节。从图中看出两次实物结果有一定差异,可能由两次起始温度不一样和系统自身误差造成,但仿真曲线与实物曲线基本吻合,总体来说实验成功。
3.电机速度PID实验
3.1 实验目的
(1)通过实验了解调速控制系统的硬件组成,以及各个单元的作用;
(2)掌握PID各项参数的作用;
(3)掌握调速系统中PID运算的参数整定;
(4)初步掌握闭环系统的基本调试方法;
3.2 实验原理
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的,即调节器的输出与输入是比例—积分—微分的关系。
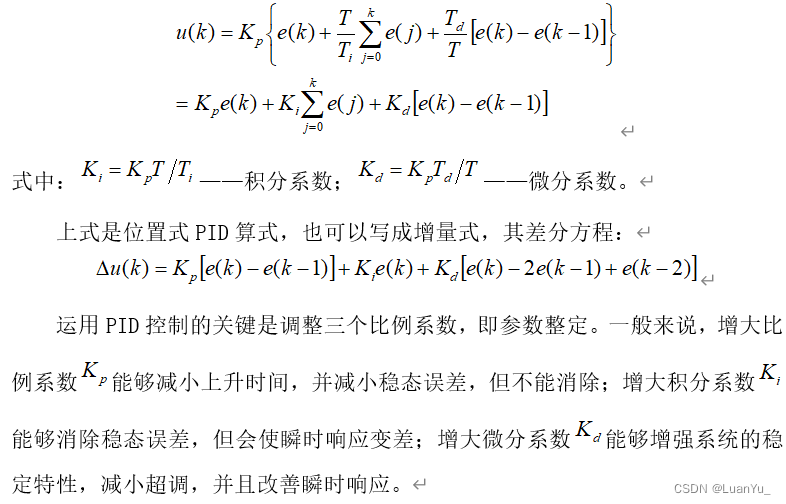
在计算机控制系统中,使用数字PID,将上式离散化,写成差分方程:
3.3 实验过程
(1)实验代码
function [ output_args ] = untitled2( input_args )
load SD.txt
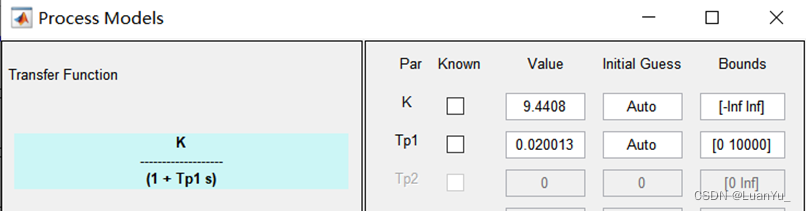
A = textread('SD.txt');
G = tf(1132.896,[0.020013 1]);
x = 0:0.005:7.215;
y = step(G,x);
plot(y,'LineWidth',2);
axis([0 50,0 1200]);
hold on
plot(A,'r','LineWidth',1)
end
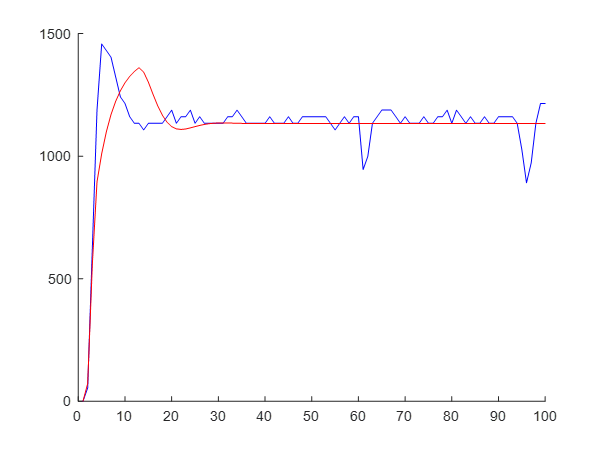
(2)运行结果

(3)实验代码
function [ output_args ] = untitled2( input_args )
load SDPID.txt
load SD240.txt
W = textread('SDPID.txt');
A = textread('SD240.txt');
axis([0 100,0 1500]);
hold on
plot(W,'b','LineWidth',1)
plot(A,'r','LineWidth',1)
end
(4)运行结果
3.4 思考与解答
1、什么是一般PID控制以及一般PID算法;
答:PID算法的参数调试是指通过调整控制参数(比例增益、积分增益/时间、微分增益/时间)让系统达到最佳的控制效果。
2、说明位置式PID和增量式PID的区别。
答:(1)位置式PID控制的输出与整个过去的状态有关,用到了误差的累加值;而增量式PID的输出只与当前拍和前两拍的误差有关,因此位置式PID控制的累积误差相对更大;
(2)增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。
(3)由于增量式PID输出的是控制量增量,如果计算机出现故障,误动作影响较小,而执行机构本身有记忆功能,可仍保持原位,不会严重影响系统的工作,而位置式的输出直接对应对象的输出,因此对系统影响较大。
4.温控系统PID实验
4.1 实验目的
(1) 通过实验了解温度控制系统的硬件组成,各个单元的作用以及信号量在系统中的传递过程;
(2) 用Keil建立工程,编写PID控制算法;
(3) 掌握PID各项参数的作用;
(4) 初步掌握闭环系统的基本调试方法。
4.2 理论分析
P=70,I=0.65,D=0.2
4.3 实验过程
(1)Matlab代码
function [ output_args ] = untitled2( input_args )
load WD.txt
A = textread('WD.txt');
plot(A,'r','LineWidth',1)
end
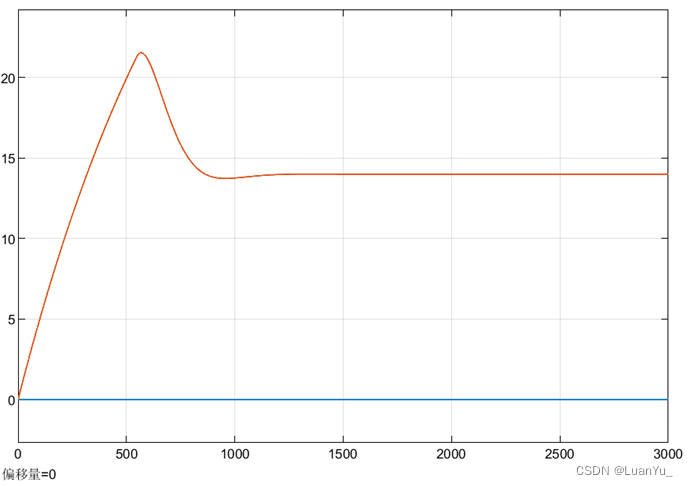
(2)运行结果
4.4 比较结果
通过理论与实际对比分析可以看出,理论与实际之间有些区别,可能是由于外界空气流动de那个因素干扰导致
5.电机速度最小拍实验
5.1 实验目的
(1)掌握最小拍控制器的设计方法;
(2)比较最小拍控制器和经典PID控制器的控制效果;
(3)无纹波和有纹波的在设计上的区别。
5.2 理论分析
(1)控制器设计

a. 求G(z)
>> s = tf('s');
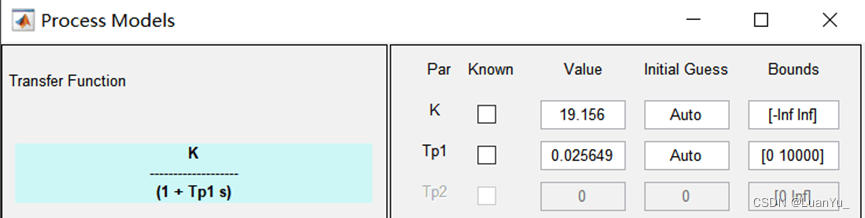
>> Gc = (19.156/(0.025649*s+1));
>> c2d(Gc,0.01,'z')
ans =
6.185
----------
z - 0.6771
采样时间: 0.01 seconds
离散时间传递函数。
b. 求D(z)

(2)建立simulink模型:
a. 未加限幅

输出波形如下,同时将生成的数据导入到工作区方便后续与实物数据进行比较。
b. 加入正负250限幅后

5.3 实验过程
在实验中我们利用占空比为120的模型进行识别,利用matlab工具识别出被控对象为:
最小拍核心代码如下:
float ZXP_Control(float refspeed,float realspeed
{ int duty_err;
err = refspeed - realspeed;
duty_err = duty_err_last + err / 6.14 - err_last_1 / 6.14 * 0.773;
duty_err_last = duty_err;
err_last_1 = err;
if(duty_err < 0) duty_err = 0;
if(duty_err + 39 > 250) //39是考虑电机死区的因素
return 250;
else return duty_err + 39;
}
5.4 比较结果
(1)Matlab代码如下
function [ output_args ] = untitled2( input_args )
load SD120.txt
load ZXP.txt
load YXP.txt
A = textread('SD120.txt');
W= textread('ZXP.txt');
Q= textread('YXP.txt');
G = tf(2298.72,[0.025649 1]);
x = 0:0.005:5.48;
y = step(G,x);
plot(y,'LineWidth',2);
axis([0 100,0 3500]);
hold on
plot(A,'r','LineWidth',1)
plot(W,'b','LineWidth',1)
plot(Q,'g','LineWidth',1)
end
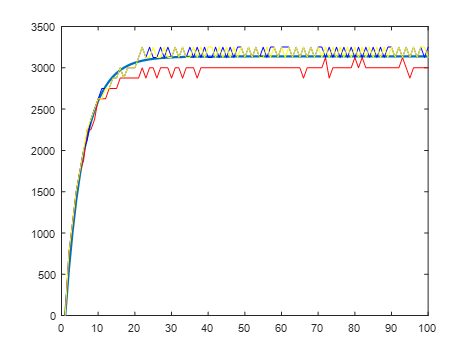
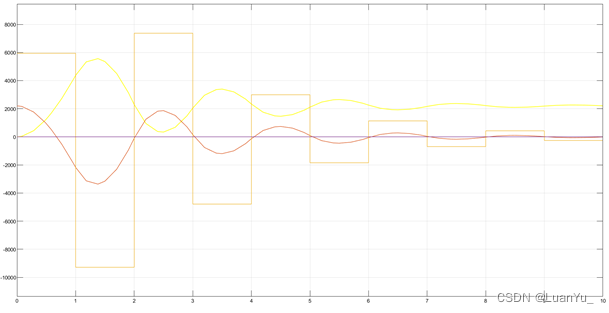
(2)运行结果
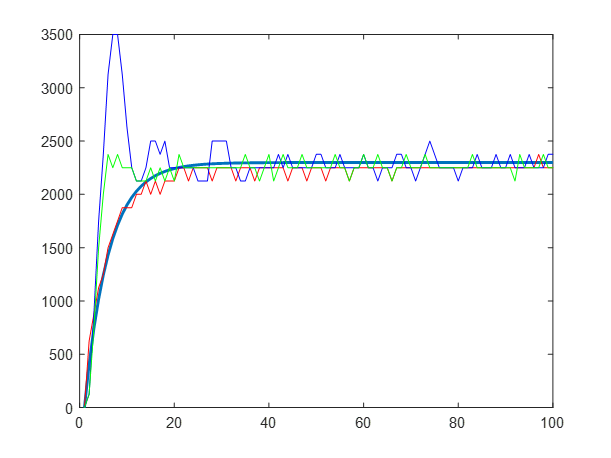
(3)结果分析
通过实验与仿真结果可以看出实验与仿真结果基本吻合,实验成功。
5.5 思考与解答
1、最小拍设计的要求是什么?
答:闭环控制系统在最少的采样周期内达到稳定,且系统在采样点的输出能够准确地跟踪输入信号,不存在稳态误差。
2、最小拍控制器局限性及如何解决?
答:局限性:
(1)最小拍控制系统的输出在采样点之间可能存在纹波
(2)最小拍控制系统对各种典型输入函数的适应性差
(3)最小拍控制系统对被控对象的模型参数变化敏感
解决方法:可以通过最小拍无纹波控制器的设计解决问题1;针对问题23,只有在不同被控对象中,不断设计控制器来解决。
3、仿真和实际的结果存在一定的差异,简述存在的差异并分析原因。
答:实际结果在初始时会突变,可能是因为电机老化等外部因素,并由于外界干扰,实验结果数据有波动,而仿真结果则是在完全理想情况下,无波动。